ardunio 矩阵求解官方库改造,添加逆的求解
Posted kekeoutlook
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ardunio 矩阵求解官方库改造,添加逆的求解相关的知识,希望对你有一定的参考价值。
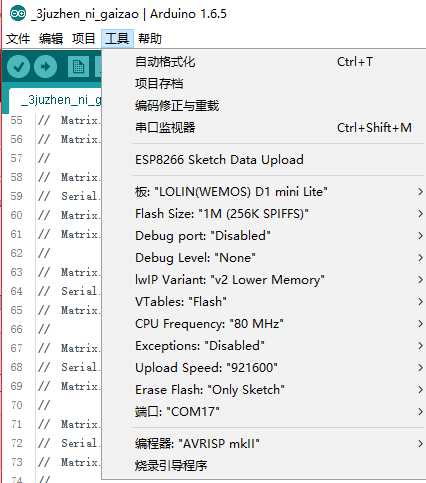
ESP8266 07模块
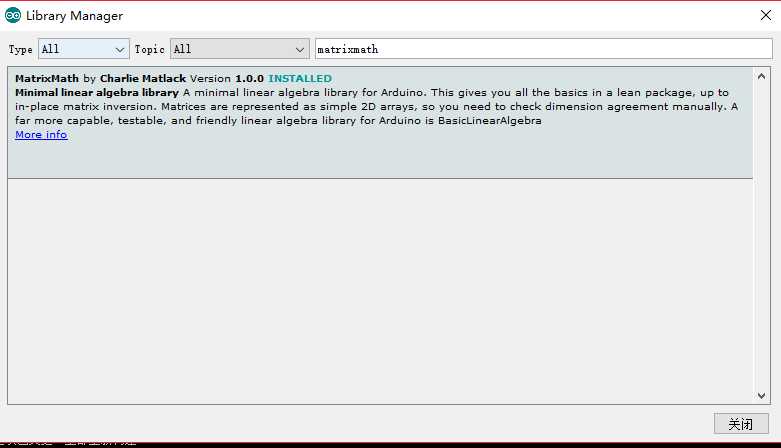
首先安装库
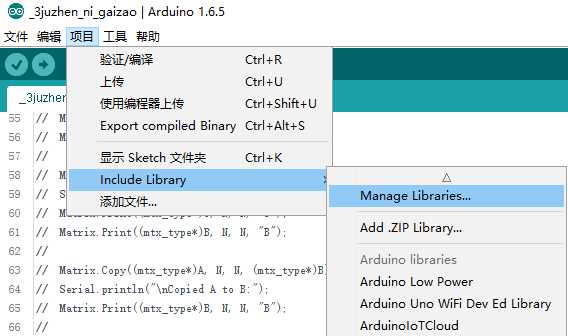
搜索
运行基本实例
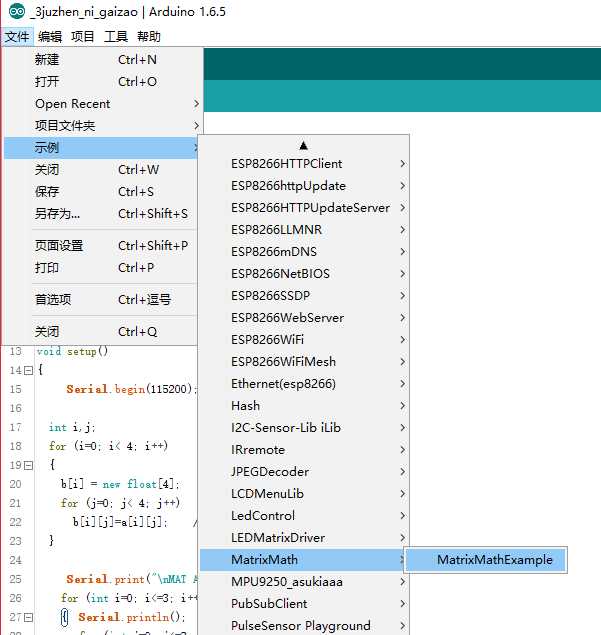
这个例子没有矩阵求逆的函数,自己添加。
使用的ESP8266芯片 07板 可外置天线
源程序
#include <MatrixMath.h>
#include "math.h"
float a[4][4]={
{1,0,0,0},
{1,0.5,0,0},
{1,0,1,0},
{1,0,0,1},
};
float **b = new float *[4]; // 拷贝a
void setup()
{
Serial.begin(115200);
int i,j;
for (i=0; i< 4; i++)
{
b[i] = new float[4];
for (j=0; j< 4; j++)
b[i][j]=a[i][j]; // 拷贝a
}
Serial.print("\\nMAT A IS:");
for (int i=0; i<=3; i++)
{ Serial.println();
for (int j=0; j<=3; j++)
{ Serial.print(a[i][j]);Serial.print(" , ");}
}
Matrix.NI(b,4);
Serial.print("\\nMAT A- IS:");
for (int i=0; i<=3; i++)
{
Serial.println("");
for (int j=0; j<=3; j++)
{ Serial.print(b[i][j]);Serial.print(" , ");}
}
}
void loop()
{
// Matrix.Multiply((mtx_type*)A, (mtx_type*)B, N, N, N, (mtx_type*)C);
//
// Serial.println("\\nAfter multiplying C = A*B:");
// Matrix.Print((mtx_type*)A, N, N, "A");
//
// Matrix.Print((mtx_type*)B, N, N, "B");
// Matrix.Print((mtx_type*)C, N, N, "C");
// Matrix.Print((mtx_type*)v, N, 1, "v");
//
// Matrix.Add((mtx_type*) B, (mtx_type*) C, N, N, (mtx_type*) C);
// Serial.println("\\nC = B+C (addition in-place)");
// Matrix.Print((mtx_type*)C, N, N, "C");
// Matrix.Print((mtx_type*)B, N, N, "B");
//
// Matrix.Copy((mtx_type*)A, N, N, (mtx_type*)B);
// Serial.println("\\nCopied A to B:");
// Matrix.Print((mtx_type*)B, N, N, "B");
//
// Matrix.Invert((mtx_type*)A, N);
// Serial.println("\\nInverted A:");
// Matrix.Print((mtx_type*)A, N, N, "A");
//
// Matrix.Multiply((mtx_type*)A, (mtx_type*)B, N, N, N, (mtx_type*)C);
// Serial.println("\\nC = A*B");
// Matrix.Print((mtx_type*)C, N, N, "C");
//
// // Because the library uses pointers and DIY indexing,
// // a 1D vector can be smoothly handled as either a row or col vector
// // depending on the dimensions we specify when calling a function
// Matrix.Multiply((mtx_type*)C, (mtx_type*)v, N, N, 1, (mtx_type*)w);
// Serial.println("\\n C*v = w:");
// Matrix.Print((mtx_type*)v, N, 1, "v");
// Matrix.Print((mtx_type*)w, N, 1, "w");
// while(1);
}
依赖库文家修改
头文件
添加一个函数
int NI(mtx_type **a, int n);
/*
* MatrixMath.h Library for Matrix Math
*
* Created by Charlie Matlack on 12/18/10.
* Modified from code by RobH45345 on Arduino Forums, algorithm from
* NUMERICAL RECIPES: The Art of Scientific Computing.
* Modified to work with Arduino 1.0/1.5 by randomvibe & robtillaart
* Made into a real library on GitHub by Vasilis Georgitzikis (tzikis)
* so that it‘s easy to use and install (March 2015)
*/
#ifndef MatrixMath_h
#define MatrixMath_h
#define mtx_type float
#if defined(ARDUINO) && ARDUINO >= 100
#include "Arduino.h"
#else
#include "WProgram.h"
#endif
class MatrixMath
{
public:
//MatrixMath();
void Print(mtx_type* A, int m, int n, String label);
void Copy(mtx_type* A, int n, int m, mtx_type* B);
void Multiply(mtx_type* A, mtx_type* B, int m, int p, int n, mtx_type* C);
void Add(mtx_type* A, mtx_type* B, int m, int n, mtx_type* C);
void Subtract(mtx_type* A, mtx_type* B, int m, int n, mtx_type* C);
void Transpose(mtx_type* A, int m, int n, mtx_type* C);
void Scale(mtx_type* A, int m, int n, mtx_type k);
int Invert(mtx_type* A, int n);
// 自己添加的求逆函数
int NI(mtx_type **a, int n);
};
extern MatrixMath Matrix;
#endif
库文件.cpp修改
修改后
/*
* MatrixMath.cpp Library for Matrix Math
*
* Created by Charlie Matlack on 12/18/10.
* Modified from code by RobH45345 on Arduino Forums, algorithm from
* NUMERICAL RECIPES: The Art of Scientific Computing.
*/
#include "MatrixMath.h"
#define NR_END 1
MatrixMath Matrix; // Pre-instantiate
// Matrix Printing Routine
// Uses tabs to separate numbers under assumption printed mtx_type width won‘t cause problems
void MatrixMath::Print(mtx_type* A, int m, int n, String label)
{
// A = input matrix (m x n)
int i, j;
Serial.println();
Serial.println(label);
for (i = 0; i < m; i++)
{
for (j = 0; j < n; j++)
{
Serial.print(A[n * i + j]);
Serial.print("\\t");
}
Serial.println();
}
}
void MatrixMath::Copy(mtx_type* A, int n, int m, mtx_type* B)
{
int i, j;
for (i = 0; i < m; i++)
for(j = 0; j < n; j++)
{
B[n * i + j] = A[n * i + j];
}
}
//Matrix Multiplication Routine
// C = A*B
void MatrixMath::Multiply(mtx_type* A, mtx_type* B, int m, int p, int n, mtx_type* C)
{
// A = input matrix (m x p)
// B = input matrix (p x n)
// m = number of rows in A
// p = number of columns in A = number of rows in B
// n = number of columns in B
// C = output matrix = A*B (m x n)
int i, j, k;
for (i = 0; i < m; i++)
for(j = 0; j < n; j++)
{
C[n * i + j] = 0;
for (k = 0; k < p; k++)
C[n * i + j] = C[n * i + j] + A[p * i + k] * B[n * k + j];
}
}
//Matrix Addition Routine
void MatrixMath::Add(mtx_type* A, mtx_type* B, int m, int n, mtx_type* C)
{
// A = input matrix (m x n)
// B = input matrix (m x n)
// m = number of rows in A = number of rows in B
// n = number of columns in A = number of columns in B
// C = output matrix = A+B (m x n)
int i, j;
for (i = 0; i < m; i++)
for(j = 0; j < n; j++)
C[n * i + j] = A[n * i + j] + B[n * i + j];
}
//Matrix Subtraction Routine
void MatrixMath::Subtract(mtx_type* A, mtx_type* B, int m, int n, mtx_type* C)
{
// A = input matrix (m x n)
// B = input matrix (m x n)
// m = number of rows in A = number of rows in B
// n = number of columns in A = number of columns in B
// C = output matrix = A-B (m x n)
int i, j;
for (i = 0; i < m; i++)
for(j = 0; j < n; j++)
C[n * i + j] = A[n * i + j] - B[n * i + j];
}
//Matrix Transpose Routine
void MatrixMath::Transpose(mtx_type* A, int m, int n, mtx_type* C)
{
// A = input matrix (m x n)
// m = number of rows in A
// n = number of columns in A
// C = output matrix = the transpose of A (n x m)
int i, j;
for (i = 0; i < m; i++)
for(j = 0; j < n; j++)
C[m * j + i] = A[n * i + j];
}
void MatrixMath::Scale(mtx_type* A, int m, int n, mtx_type k)
{
for (int i = 0; i < m; i++)
for (int j = 0; j < n; j++)
A[n * i + j] = A[n * i + j] * k;
}
//Matrix Inversion Routine
// * This function inverts a matrix based on the Gauss Jordan method.
// * Specifically, it uses partial pivoting to improve numeric stability.
// * The algorithm is drawn from those presented in
// NUMERICAL RECIPES: The Art of Scientific Computing.
// * The function returns 1 on success, 0 on failure.
// * NOTE: The argument is ALSO the result matrix, meaning the input matrix is REPLACED
int MatrixMath::Invert(mtx_type* A, int n)
{
// A = input matrix AND result matrix
// n = number of rows = number of columns in A (n x n)
int pivrow = 0; // keeps track of current pivot row
int k, i, j; // k: overall index along diagonal; i: row index; j: col index
int pivrows[n]; // keeps track of rows swaps to undo at end
mtx_type tmp; // used for finding max value and making column swaps
for (k = 0; k < n; k++)
{
// find pivot row, the row with biggest entry in current column
tmp = 0;
for (i = k; i < n; i++)
{
if (abs(A[i * n + k]) >= tmp) // ‘Avoid using other functions inside abs()?‘
{
tmp = abs(A[i * n + k]);
pivrow = i;
}
}
// check for singular matrix
if (A[pivrow * n + k] == 0.0f)
{
Serial.println("Inversion failed due to singular matrix");
return 0;
}
// Execute pivot (row swap) if needed
if (pivrow != k)
{
// swap row k with pivrow
for (j = 0; j < n; j++)
{
tmp = A[k * n + j];
A[k * n + j] = A[pivrow * n + j];
A[pivrow * n + j] = tmp;
}
}
pivrows[k] = pivrow; // record row swap (even if no swap happened)
tmp = 1.0f / A[k * n + k]; // invert pivot element
A[k * n + k] = 1.0f; // This element of input matrix becomes result matrix
// Perform row reduction (divide every element by pivot)
for (j = 0; j < n; j++)
{
A[k * n + j] = A[k * n + j] * tmp;
}
// Now eliminate all other entries in this column
for (i = 0; i < n; i++)
{
if (i != k)
{
tmp = A[i * n + k];
A[i * n + k] = 0.0f; // The other place where in matrix becomes result mat
for (j = 0; j < n; j++)
{
A[i * n + j] = A[i * n + j] - A[k * n + j] * tmp;
}
}
}
}
// Done, now need to undo pivot row swaps by doing column swaps in reverse order
for (k = n - 1; k >= 0; k--)
{
if (pivrows[k] != k)
{
for (i = 0; i < n; i++)
{
tmp = A[i * n + k];
A[i * n + k] = A[i * n + pivrows[k]];
A[i * n + pivrows[k]] = tmp;
}
}
}
return 1;
}
//自己添加的求逆函数
int MatrixMath::NI(mtx_type **a, int n){
int *is = new int[n];
int *js = new int[n];
int i,j,k;
double d,p;
for ( k = 0; k < n; k++)
{
d = 0.0;
for (i=k; i<=n-1; i++)
for (j=k; j<=n-1; j++)
{
p=fabs(a[i][j]);
if (p>d) { d=p; is[k]=i; js[k]=j;}
}
if ( 0.0 == d )
{
free(is); free(js); Serial.println("err**not inv\\n");
return(0);
}
if (is[k]!=k)
for (j=0; j<=n-1; j++)
{
p=a[k][j];
a[k][j]=a[is[k]][j];
a[is[k]][j]=p;
}
if (js[k]!=k)
for (i=0; i<=n-1; i++)
{
p=a[i][k];
a[i][k]=a[i][js[k]];
a[i][js[k]]=p;
}
a[k][k] = 1.0/a[k][k];
for (j=0; j<=n-1; j++)
if (j!=k)
{
a[k][j] *= a[k][k];
}
for (i=0; i<=n-1; i++)
if (i!=k)
for (j=0; j<=n-1; j++)
if (j!=k)
{
a[i][j] -= a[i][k]*a[k][j];
}
for (i=0; i<=n-1; i++)
if (i!=k)
{
a[i][k] = -a[i][k]*a[k][k];
}
}
for ( k = n-1; k >= 0; k--)
{
if (js[k]!=k)
for (j=0; j<=n-1; j++)
{
p = a[k][j];
a[k][j] = a[js[k]][j];
a[js[k]][j]=p;
}
if (is[k]!=k)
for (i=0; i<=n-1; i++)
{
p = a[i][k];
a[i][k]=a[i][is[k]];
a[i][is[k]] = p;
}
}
free(is); free(js);
return(1);
}
以上是关于ardunio 矩阵求解官方库改造,添加逆的求解的主要内容,如果未能解决你的问题,请参考以下文章