ROS Navigation中的map_server地图包功能和使用
Posted flyinggod
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS Navigation中的map_server地图包功能和使用相关的知识,希望对你有一定的参考价值。
博客参考 http://wiki.ros.org/map_server 和 https://www.ncnynl.com/archives/201708/1897.html
1. 安装map_server
sudo apt-get install ros-kinetic-map-server
2. 具体使用说明
map_server使得地图的数据变成 ros 的service 可以被调用。其中以两种方式存储。一个是yaml文件,他存储了数据的元数据。一个是image file 他编码了地图的占据性情况。其中 image file 中白色像素是空的,黑色像素是被占据的。色彩或者灰色的是被接受的。
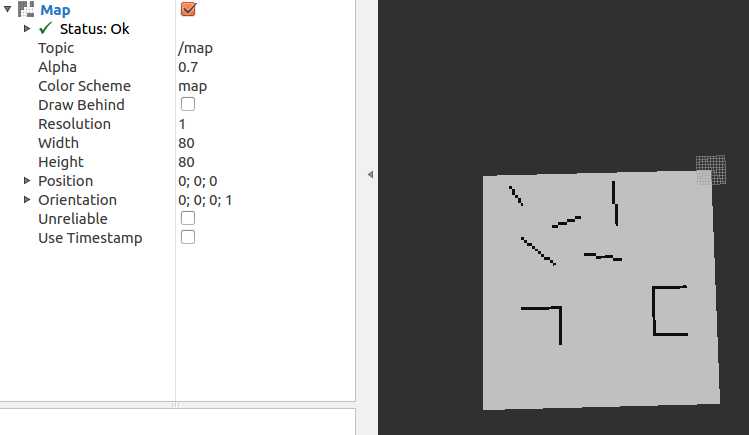
如上可以看到map_server是一个ROS 节点,可以从磁盘读取地图并使用ROS service提供地图,此图是rviz订阅/map服务可视化之后的结果
map_server概要
- map_server包提供了一个map_server ROS 节点, 该节点通过ROS 服务器方式提供地图数据。
- 该包还提供了map_saver命令行utility, 使用该工具可将动态创建的地图保存成文件。
地图格式
- 该包中的工具使用过的地图会被存储在两个文件中。
- 一个是YAML格式的文件描述地图meta-data并命名image文件。
- 另一个image文件用来编码occupancy data。
Image 格式
-
Image 描述了地图上每个单元在相应像素的颜色中的占用状态。
-
白色像素表示自由,黑色像素格表示占用,两种颜色之间的单元表示未知。
-
彩色和灰度图像都适合,但大多数地图是灰度图像(尽管它们存储的好像是以彩色的形式),YAML文件的阈值划分为3类;阈值是在map_server内部完成的。
-
比较阈值参数时,图像单元占用概率的计算如下:occ = (255 - color_avg) / 255.0 (color_avg是用8位数表示的来自于所有通道的平均值)。
-
如果图像是24位颜色,一个单元的颜色0x0a0a0a有一个0.96的概率,这是一个完全占用((255-(0*16+10))/255.0=0.96)。
-
如果像素颜色是0xeeeeee,则占用概率是0.07, 这意味着几乎没有被占用。
-
当ROS消息通信时,占用度被表示为范围为[0-100]的整数,0的意思完全是自由的,100的意思完全占用,特殊值-1完全未知。
-
Image data 通过 SDL_Image库读取,取决于sdl_image在特定平台上提供的内容,且支持多种格式。
-
一般来说,Image data 支持大多数流行的图像格式。
-
一个必须要注意的例外是PNG格式在OS X平台上不能被支持。
YAML格式
- 以下是YAML格式的一个示例:
image: testmap.png resolution: 0.1 origin: [0.0, 0.0, 0.0] occupied_thresh: 0.65 free_thresh: 0.196 negate: 0
需要的字段:
-
image:指定包含occupancy data的image文件路径; 可以是绝对路径,也可以是相对于YAML文件的对象路径 。
-
resolution:地图分辨率,单位是meters/pixel 。
-
origin:图中左下角像素的二维位姿,如(x,y,yaw),yaw逆时针旋转(yaw=0表示没有旋转)。系统的很多部分现在忽略yaw值。
-
occupied_thresh:像素占用率大于这个阈值则认为完全占用。
-
free_thresh:像素占用率比该阈值小被则认为完全自由。
-
negate:无论白色或黑色,占用或自由,语义应该是颠倒的(阈值的解释不受影响)。
-
negate : Whether the white/black free/occupied semantics should be reversed (interpretation of thresholds is unaffected)
命令行工具
(1) Map_server
-
map_server是一个ROS 节点,可以从磁盘读取地图并使用ROS service提供地图。
-
目前实现的map_server可将地图中的颜色值转化成三种占用值: 自由 (0), 占用 (100), 和 未知 (-1).
-
这个工具的未来版本可能会使用0和100之间的值来表达更细致的占用度。
-
命令语法
rosrun map_server map_server mymap.yaml
可视化需要,roscore 和 rviz的配合
- 注意:map data可以通过指定topic或者 service来提取。service的方式最后可能要被废弃。
- 发布的主题
[map_metadata (nav_msgs/MapMetaData)][3]
- 通过指定话题获取地图的metadata
[map (nav_msgs/OccupancyGrid)][4]
-
通过指定话题获取地图
-
服务
static_map ([nav_msgs/GetMap][5])
-
通过该服务来获取地图
-
参数
~frame_id (string, default: "map")
- 设置已发布的地图的坐标系(The frame to set in the header of the published map. )
(2) map_saver
-
map_saver可以把地图保存到磁盘。 例如:从SLAM mapping 服务中保存.
-
命令语法
rosrun map_server map_saver [-f mapname]
-
Map_saver获取地图数据,并把它写到map.pgm和map.yaml。
-
使用-f选项为指定地图的存放目录和名称。
- 命令示例
rosrun map_server map_saver -f /home/xxx/map/mm
-
/home/xxx/map/为地图目录路径,mm为地图名称,生成后得到mm.yaml和mm.pgm两个文件
-
订阅话题
map (nav_msgs/OccupancyGrid)
- 通过指定话题来获取地图
参考资料:
- http://wiki.ros.org/map_server
- http://blog.csdn.net/x_r_su/article/details/53392272
- http://blog.csdn.net/w383117613/article/details/46860075
以上是关于ROS Navigation中的map_server地图包功能和使用的主要内容,如果未能解决你的问题,请参考以下文章