Arduino舵机控制
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Arduino舵机控制相关的知识,希望对你有一定的参考价值。
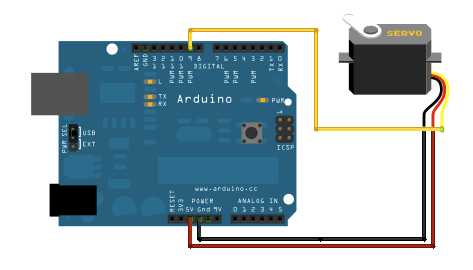
普通舵机有3根线:GND(黑)、VCC(红)、Signal(黄)
红色的是电源正极,黑色的是电源负极,白色的是信号线。有些舵机线是红棕橘三色,分别对应红黑白。
#include <Servo.h> Servo myservo; int pos = 90; void setup() { Serial.begin(9600); pinMode(4, OUTPUT); pinMode(5, OUTPUT); myservo.attach(9); }
博客:http://www.cnblogs.com/xiaobo-Linux/
void loop() { char val = Serial.read(); if(val==‘z‘) { pos+=30; // in steps of 1 degree myservo.write(pos); // tell servo to go to position in variable ‘pos‘ delay(150); // waits 15ms for the servo to reach the position Serial.println(" servo_right"); } if(val==‘x‘) { pos-=30; // in steps of 1 degree myservo.write(pos); // tell servo to go to position in variable ‘pos‘ delay(150); // waits 15ms for the servo to reach the position Serial.println(" servo_left"); }
以上是关于Arduino舵机控制的主要内容,如果未能解决你的问题,请参考以下文章