ARM-Linux S5PV210 UART驱动(转)
Posted chd_zhang
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ARM-Linux S5PV210 UART驱动(转)相关的知识,希望对你有一定的参考价值。
ARM-Linux S5PV210 UART驱动(3)----串口核心层、关键结构体、接口关系
尽管一个特定的UART设备驱动完全可以按照tty驱动的设计方法来设计,即定义tty_driver并实现tty_operations其中的成员函数,但是Linux已经在文件serial_core.c中实现了UART设备的通用tty驱动层,称为串口核心层,这样,UART驱动的主要任务变成了实现serial_core.c中定义的一组uart_xxx接口而非tty_xxx接口。
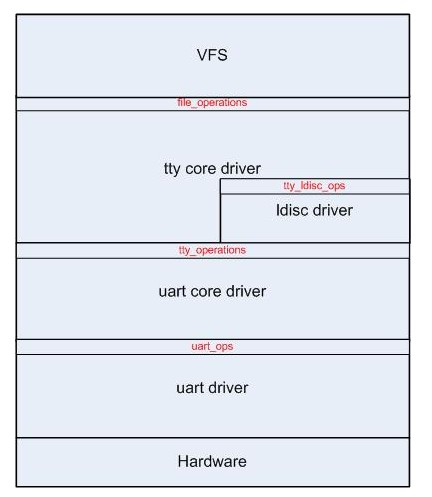
1.下图描述了串行系统间的层次结构关系,可以概括为:用户应用层 --> 线路规划层 --> TTY层 --> 底层驱动层 --> 物理硬件层
2.下图是串口核心层在整个tty源文件关系及数据流向中的位置:
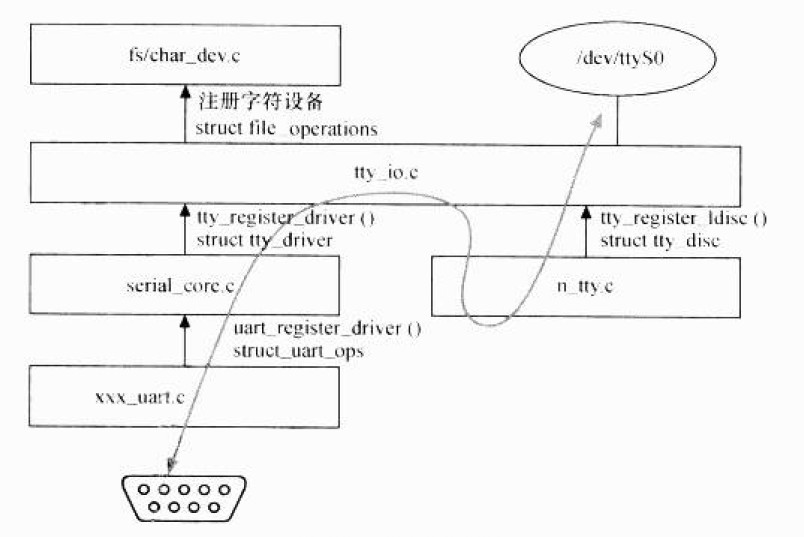
其中的xxx_uart.c在此处就是drivers/serial/samsung.c和s5pv210.c
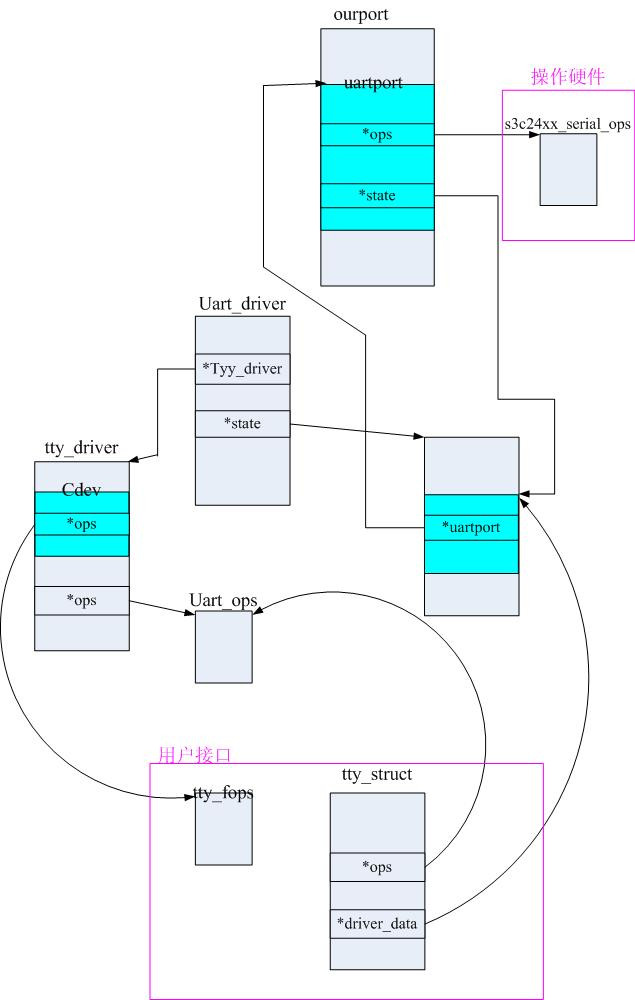
3.接口关系:
从接口关系图可以看出,用户对uart设备操作的调用关系非常简单,
file_operations => [tty_ldisc_ops] => tty_operations => uart ops
其中tty_ldisc_ops线路规程并不是必要的,依赖于应用层设置是否使用ldisc处理数据。
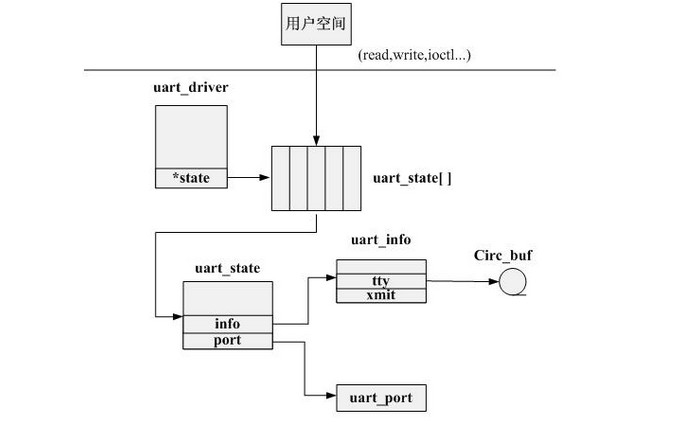
4.UART驱动的总图:
5.uart驱动常用的数据结构表示如下:
6.Uart驱动程序主要围绕三个关键的数据结构展开(include/linux/serial_core.h中定义):
UART特定的驱动程序结构定义:struct uart_driver s3c24xx_uart_drv;
UART端口结构定义: struct s3c24xx_uart_port s3c24xx_serial_ports;
UART相关操作函数结构定义: struct uart_ops s3c24xx_serial_ops;
【1】uart_driver 封装了tty_driver,使得底层的UART驱动无需关心tty_driver

struct uart_driver {
struct module *owner;
const char *driver_name;
const char *dev_name;
int major;
int minor;
int nr;
struct console *cons;
/*
* these are private; the low level driver should not
* touch these; they should be initialised to NULL
*/
struct uart_state *state;
struct tty_driver *tty_driver;
};
其中的uart_state是设备私有信息结构体,
在uart_open()中:
tty->driver_data = state;
在其他uart_xxx()中:
struct uart_state *state = tty->driver_data;
就可以获取设备私有信息结构体。
static struct uart_driver s3c24xx_uart_drv= {
.owner =THIS_MODULE,
.dev_name = "s3c2440_serial", //具体设备名称
.nr =CONFIG_SERIAL_SAMSUNG_UARTS, //定义有几个端口
.cons = S3C24XX_SERIAL_CONSOLE, //console接口
.driver_name =S3C24XX_SERIAL_NAME, //串口名:ttySAC
.major =S3C24XX_SERIAL_MAJOR, //主设备号
.minor =S3C24XX_SERIAL_MINOR, //次设备号
};
一个tty驱动必须注册/注销tty_driver,而一个UART驱动则变为注册/注销uart_driver,使用如下接口:
int uart_register_driver(struct uart_driver *drv);
void uart_unregister_driver(struct uart_driver *drv);
【2】uart_port用于描述一个UART端口(直接对应于一个串口)的I/O端口或者IO内存地址等信息。
struct uart_port {
spinlock_t lock; /* port lock */
unsigned long iobase; /* in/out[bwl] */
unsigned char __iomem *membase; /* read/write[bwl] */
unsigned int (*serial_in)(struct uart_port *, int);
void (*serial_out)(struct uart_port *, int, int);
unsigned int irq; /* irq number */
unsigned long irqflags; /* irq flags */
unsigned int uartclk; /* base uart clock */
unsigned int fifosize; /* tx fifo size */
unsigned char x_char; /* xon/xoff char */
unsigned char regshift; /* reg offset shift */
unsigned char iotype; /* io access style */
unsigned char unused1;
#define UPIO_PORT (0)
#define UPIO_HUB6 (1)
#define UPIO_MEM (2)
#define UPIO_MEM32 (3)
#define UPIO_AU (4) /* Au1x00 type IO */
#define UPIO_TSI (5) /* Tsi108/109 type IO */
#define UPIO_DWAPB (6) /* DesignWare APB UART */
#define UPIO_RM9000 (7) /* RM9000 type IO */
unsigned int read_status_mask; /* driver specific */
unsigned int ignore_status_mask; /* driver specific */
struct uart_state *state; /* pointer to parent state */
struct uart_icount icount; /* statistics */
struct console *cons; /* struct console, if any */
#if defined(CONFIG_SERIAL_CORE_CONSOLE) || defined(SUPPORT_SYSRQ)
unsigned long sysrq; /* sysrq timeout */
#endif
upf_t flags;
#define UPF_FOURPORT ((__force upf_t) (1 << 1))
#define UPF_SAK ((__force upf_t) (1 << 2))
#define UPF_SPD_MASK ((__force upf_t) (0x1030))
#define UPF_SPD_HI ((__force upf_t) (0x0010))
#define UPF_SPD_VHI ((__force upf_t) (0x0020))
#define UPF_SPD_CUST ((__force upf_t) (0x0030))
#define UPF_SPD_SHI ((__force upf_t) (0x1000))
#define UPF_SPD_WARP ((__force upf_t) (0x1010))
#define UPF_SKIP_TEST ((__force upf_t) (1 << 6))
#define UPF_AUTO_IRQ ((__force upf_t) (1 << 7))
#define UPF_HARDPPS_CD ((__force upf_t) (1 << 11))
#define UPF_LOW_LATENCY ((__force upf_t) (1 << 13))
#define UPF_BUGGY_UART ((__force upf_t) (1 << 14))
#define UPF_NO_TXEN_TEST ((__force upf_t) (1 << 15))
#define UPF_MAGIC_MULTIPLIER ((__force upf_t) (1 << 16))
#define UPF_CONS_FLOW ((__force upf_t) (1 << 23))
#define UPF_SHARE_IRQ ((__force upf_t) (1 << 24))
/* The exact UART type is known and should not be probed. */
#define UPF_FIXED_TYPE ((__force upf_t) (1 << 27))
#define UPF_BOOT_AUTOCONF ((__force upf_t) (1 << 28))
#define UPF_FIXED_PORT ((__force upf_t) (1 << 29))
#define UPF_DEAD ((__force upf_t) (1 << 30))
#define UPF_IOREMAP ((__force upf_t) (1 << 31))
#define UPF_CHANGE_MASK ((__force upf_t) (0x17fff))
#define UPF_USR_MASK ((__force upf_t) (UPF_SPD_MASK|UPF_LOW_LATENCY))
unsigned int mctrl; /* current modem ctrl settings */
unsigned int timeout; /* character-based timeout */
unsigned int type; /* port type */
const struct uart_ops *ops;//UART操作集------->
unsigned int custom_divisor;
unsigned int line; /* port index */
resource_size_t mapbase; /* for ioremap */
struct device *dev; /* parent device */
unsigned char hub6; /* this should be in the 8250 driver */
unsigned char suspended;
unsigned char unused[2];
void *private_data; /* generic platform data pointer */
};
s3c24xx_uart_port 封装了uart_port:
struct s3c24xx_uart_port {
unsigned char rx_claimed;
unsigned char tx_claimed;
unsigned int pm_level;
unsigned long baudclk_rate;
unsigned int rx_irq;
unsigned int tx_irq;
struct s3c24xx_uart_info *info;
struct s3c24xx_uart_clksrc *clksrc;
struct clk *clk;
struct clk *baudclk;
struct uart_port port;
#ifdef CONFIG_CPU_FREQ
struct notifier_block freq_transition;
#endif
int channelnum;
};
static struct s3c24xx_uart_port
s3c24xx_serial_ports[CONFIG_SERIAL_SAMSUNG_UARTS] = {
[0] = {//串口0;
.port = {
.lock = __SPIN_LOCK_UNLOCKED(s3c24xx_serial_ports[0].port.lock),
.iotype = UPIO_MEM,
.irq = IRQ_S3CUART_RX0,
.uartclk = 0,
.fifosize = 16,//定义FIFO缓存区大小
.ops = &s3c24xx_serial_ops,//串口相关操作函数
.flags = UPF_BOOT_AUTOCONF,
.line = 0,//线路
}
},
[1] = {//串口1;
.port = {
.lock = __SPIN_LOCK_UNLOCKED(s3c24xx_serial_ports[1].port.lock),
.iotype = UPIO_MEM,
.irq = IRQ_S3CUART_RX1,
.uartclk = 0,
.fifosize = 16,
.ops = &s3c24xx_serial_ops,
.flags = UPF_BOOT_AUTOCONF,
.line = 1,
}
},
#if CONFIG_SERIAL_SAMSUNG_UARTS > 2
[2] = {
.port = {
.lock = __SPIN_LOCK_UNLOCKED(s3c24xx_serial_ports[2].port.lock),
.iotype = UPIO_MEM,
.irq = IRQ_S3CUART_RX2,
.uartclk = 0,
.fifosize = 16,
.ops = &s3c24xx_serial_ops,
.flags = UPF_BOOT_AUTOCONF,
.line = 2,
}
},
#endif
#if CONFIG_SERIAL_SAMSUNG_UARTS > 3
[3] = {
.port = {
.lock = __SPIN_LOCK_UNLOCKED(s3c24xx_serial_ports[3].port.lock),
.iotype = UPIO_MEM,
.irq = IRQ_S3CUART_RX3,
.uartclk = 0,
.fifosize = 16,
.ops = &s3c24xx_serial_ops,
.flags = UPF_BOOT_AUTOCONF,
.line = 3,
}
}
#endif
};
在xxx_probe()中:
struct s3c24xx_uart_port *ourport;//s3c24xx_uart_port封装了uart_port ourport = &s3c24xx_serial_ports[dev->id];//s3c24xx_serial_ports是s3c24xx_uart_port结构体类型的
【3】uart_ops定义了针对UART的一系列操作,
/*
* This structure describes all the operations that can be
* done on the physical hardware.
*/
struct uart_ops {
unsigned int (*tx_empty)(struct uart_port *);
void (*set_mctrl)(struct uart_port *, unsigned int mctrl);
unsigned int (*get_mctrl)(struct uart_port *);
void (*stop_tx)(struct uart_port *);
void (*start_tx)(struct uart_port *);
void (*send_xchar)(struct uart_port *, char ch);
void (*stop_rx)(struct uart_port *);
void (*enable_ms)(struct uart_port *);
void (*break_ctl)(struct uart_port *, int ctl);
int (*startup)(struct uart_port *);
void (*shutdown)(struct uart_port *);
void (*flush_buffer)(struct uart_port *);
void (*set_termios)(struct uart_port *, struct ktermios *new,
struct ktermios *old);
void (*set_ldisc)(struct uart_port *);
void (*pm)(struct uart_port *, unsigned int state,
unsigned int oldstate);
int (*set_wake)(struct uart_port *, unsigned int state);
void (*wake_peer)(struct uart_port *);
/*
* Return a string describing the type of the port
*/
const char *(*type)(struct uart_port *);
/*
* Release IO and memory resources used by the port.
* This includes iounmap if necessary.
*/
void (*release_port)(struct uart_port *);
/*
* Request IO and memory resources used by the port.
* This includes iomapping the port if necessary.
*/
int (*request_port)(struct uart_port *);
void (*config_port)(struct uart_port *, int);
int (*verify_port)(struct uart_port *, struct serial_struct *);
int (*ioctl)(struct uart_port *, unsigned int, unsigned long);
#ifdef CONFIG_CONSOLE_POLL
void (*poll_put_char)(struct uart_port *, unsigned char);
int (*poll_get_char)(struct uart_port *);
#endif
};
//一般来说,实现下面的成员函数是UART驱动的主体工作
static struct uart_ops s3c24xx_serial_ops ={ .pm =s3c24xx_serial_pm, //电源管理函数 .tx_empty = s3c24xx_serial_tx_empty, //检车发送FIFO缓冲区是否空 .get_mctrl = s3c24xx_serial_get_mctrl, //是否串口流控 .set_mctrl = s3c24xx_serial_set_mctrl, //是否设置串口流控cts .stop_tx =s3c24xx_serial_stop_tx, //停止发送 .start_tx =s3c24xx_serial_start_tx, //启动发送 .stop_rx =s3c24xx_serial_stop_rx, //停止接收 .enable_ms = s3c24xx_serial_enable_ms, //空函数 .break_ctl = s3c24xx_serial_break_ctl, //发送break信号 .startup =s3c24xx_serial_startup, //串口发送/接收,以及中断申请初始配置函数 .shutdown = s3c24xx_serial_shutdown, //关闭串口 .set_termios = s3c24xx_serial_set_termios,//串口clk,波特率,数据位等参数设置 .type = s3c24xx_serial_type, // CPU类型关于串口 .release_port =s3c24xx_serial_release_port, //释放串口 .request_port =s3c24xx_serial_request_port, //申请串口 .config_port = s3c24xx_serial_config_port, //串口的一些配置信息info .verify_port = s3c24xx_serial_verify_port, //串口检测 .wake_peer = s3c24xx_serial_wake_peer, };
而在serial_core.c中定义了tty_operations的实例,包含uart_open();uart_close();uart_send_xchar()等成员函数,这些函数借助uart_ops结构体中的成员函数来完成具体的操作。
static const struct tty_operations uart_ops = {
.open = uart_open,
.close = uart_close,
.write = uart_write,
.put_char = uart_put_char,
.flush_chars = uart_flush_chars,
.write_room = uart_write_room,
.chars_in_buffer= uart_chars_in_buffer,
.flush_buffer = uart_flush_buffer,
.ioctl = uart_ioctl,
.throttle = uart_throttle,
.unthrottle = uart_unthrottle,
.send_xchar = uart_send_xchar,
.set_termios = uart_set_termios,
.set_ldisc = uart_set_ldisc,
.stop = uart_stop,
.start = uart_start,
.hangup = uart_hangup,
.break_ctl = uart_break_ctl,
.wait_until_sent= uart_wait_until_sent,
#ifdef CONFIG_PROC_FS
.proc_fops = &uart_proc_fops,
#endif
.tiocmget = uart_tiocmget,
.tiocmset = uart_tiocmset,
#ifdef CONFIG_CONSOLE_POLL
.poll_init = uart_poll_init,
.poll_get_char = uart_poll_get_char,
.poll_put_char = uart_poll_put_char,
#endif
};
从下面的例子中可以看出串口核心层的tty_operations与uart_ops的关系:
/*
* This function is used to send a high-priority XON/XOFF character to
* the device
*/
static void uart_send_xchar(struct tty_struct *tty, char ch)
{
struct uart_state *state = tty->driver_data;
struct uart_port *port = state->uart_port;
unsigned long flags;
if (port->ops->send_xchar)/*如果uart_ops中实现了send_xchar成员函数*/
port->ops->send_xchar(port, ch);
else {
port->x_char = ch;
if (ch) {
spin_lock_irqsave(&port->lock, flags);
port->ops->start_tx(port);
spin_unlock_irqrestore(&port->lock, flags);
}
}
}
这个例子的调用关系如下:
send_xchar ----> uart_send_xchar ----> start_tx ---> s3c24xx_serial_start_tx
以上是关于ARM-Linux S5PV210 UART驱动(转)的主要内容,如果未能解决你的问题,请参考以下文章