Linux进程管理---task_struct
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Linux进程管理---task_struct相关的知识,希望对你有一定的参考价值。
首先了解一下什么是进程?
进程是进程实体的运行过程,是系统进行资源分配和调度的一个独立单元。
为了使参与并发执行的每个程序(含数据)都能独立运行,在操作系统中必须为之配置一个专门的数据结构,称之为进程控制块PCB。系统利用PCB来描述进程的基本情况和活动过程,进而控制和管理进程。
进程控制块就是task_struct结构体。
task_struct是Linux内核的一种数据结构,每个进程都把它的信息放在task_struct这个数据结构里,task_struct包含了这些内容:
标识符:描述本进程的唯一标识符,用来区别其他进程。
状态:任务状态,退出代码,退出信号等。
优先级:相对于其他进程的优先级。
程序计数器:程序中即将被执行的下一条指令的地址。
内存指针:包括程序代码和进程相关数据的指针,还有和其他进程共享的内存块的地址。
上下文数据:进程执行时处理器的寄存器中的数据。
就task_struct结构体所有成员的用法进行简要说明。
1、进程状态
volatile long state; int exit_state;
state成员的可能取值如下:
#define TASK_RUNNING 0 #define TASK_INTERRUPTIBLE 1 #define TASK_UNINTERRUPTIBLE 2 #define __TASK_STOPPED 4 #define __TASK_TRACED 8 /* in tsk->exit_state */ #define EXIT_ZOMBIE 16 #define EXIT_DEAD 32 /* in tsk->state again */ #define TASK_DEAD 64 #define TASK_WAKEKILL 128 #define TASK_WAKING 256
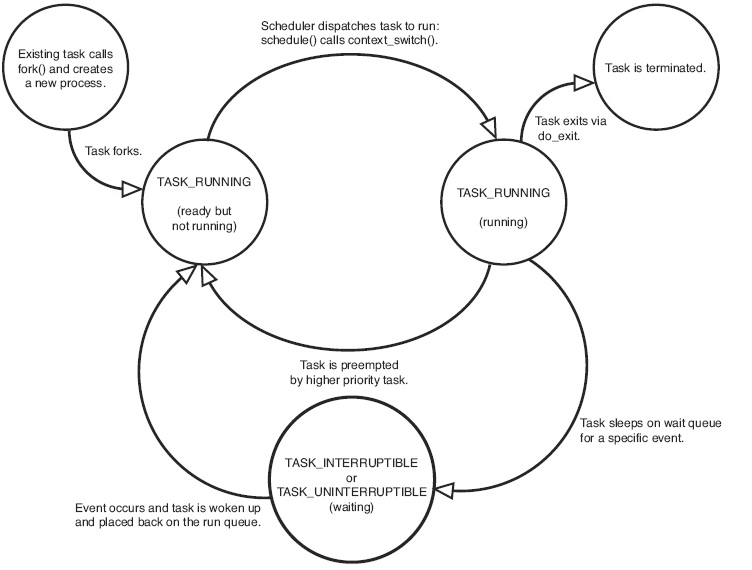
系统中的每个进程都必然处于以上所列进程状态中的一种。
TASK_RUNNING表示进程要么正在执行,要么正要准备执行。
TASK_INTERRUPTIBLE表示进程被阻塞(睡眠),直到某个条件变为真。条件一旦达成,进程的状态就被设置为TASK_RUNNING。
TASK_UNINTERRUPTIBLE的意义与TASK_INTERRUPTIBLE类似,除了不能通过接受一个信号来唤醒以外。
__TASK_STOPPED表示进程被停止执行。
__TASK_TRACED表示进程被debugger等进程监视。
EXIT_ZOMBIE表示进程的执行被终止,但是其父进程还没有使用wait()等系统调用来获知它的终止信息。
EXIT_DEAD表示进程的最终状态。
EXIT_ZOMBIE和EXIT_DEAD也可以存放在exit_state成员中。进程状态的切换过程和原因大致如下图(图片来自《Linux Kernel Development》):
2、进程标识符(PID)
pid_t pid; pid_t tgid;
在CONFIG_BASE_SMALL配置为0的情况下,PID的取值范围是0到32767,即系统中的进程数最大为32768个。
/* linux-2.6.38.8/include/linux/threads.h */ #define PID_MAX_DEFAULT (CONFIG_BASE_SMALL ? 0x1000 : 0x8000)
在Linux系统中,一个线程组中的所有线程使用和该线程组的领头线程(该组中的第一个轻量级进程)相同的PID,并被存放在tgid成员中。只有线程组的领头线程的pid成员才会被设置为与tgid相同的值。注意,getpid()系统调用返回的是当前进程的tgid值而不是pid值。
3、进程内核栈
void *stack;
进程通过alloc_thread_info函数分配它的内核栈,通过free_thread_info函数释放所分配的内核栈。
/* linux-2.6.38.8/kernel/fork.c */
static inline struct thread_info *alloc_thread_info(struct task_struct *tsk)
{
#ifdef CONFIG_DEBUG_STACK_USAGE
gfp_t mask = GFP_KERNEL | __GFP_ZERO;
#else
gfp_t mask = GFP_KERNEL;
#endif
return (struct thread_info *)__get_free_pages(mask, THREAD_SIZE_ORDER);
}
static inline void free_thread_info(struct thread_info *ti)
{
free_pages((unsigned long)ti, THREAD_SIZE_ORDER);
}其中,THREAD_SIZE_ORDER宏在linux-2.6.38.8/arch/arm/include/asm/thread_info.h文件中被定义为1,也就是说alloc_thread_info函数通过调用__get_free_pages函数分配2个页的内存(它的首地址是8192字节对齐的)。
Linux内核通过thread_union联合体来表示进程的内核栈,其中THREAD_SIZE宏的大小为8192。
union thread_union {
struct thread_info thread_info;
unsigned long stack[THREAD_SIZE/sizeof(long)];
};
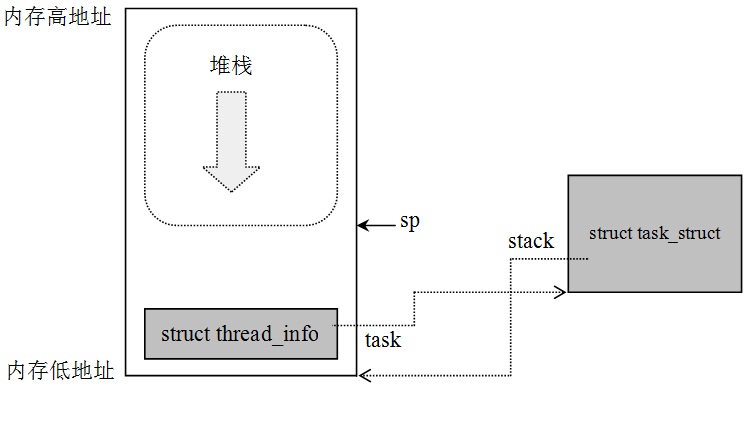
当进程从用户态切换到内核态时,进程的内核栈总是空的,所以ARM的sp寄存器指向这个栈的顶端。因此,内核能够轻易地通过sp寄存器获得当前正在CPU上运行的进程。
/* linux-2.6.38.8/arch/arm/include/asm/current.h */
static inline struct task_struct *get_current(void)
{
return current_thread_info()->task;
}
#define current (get_current())
/* linux-2.6.38.8/arch/arm/include/asm/thread_info.h */
static inline struct thread_info *current_thread_info(void)
{
register unsigned long sp asm ("sp");
return (struct thread_info *)(sp & ~(THREAD_SIZE - 1));
}进程内核栈与进程描述符的关系如下图:
4、标记
unsigned int flags; /* per process flags, defined below */
flags成员的可能取值如下:
#define PF_KSOFTIRQD 0x00000001 /* I am ksoftirqd */ #define PF_STARTING 0x00000002 /* being created */ #define PF_EXITING 0x00000004 /* getting shut down */ #define PF_EXITPIDONE 0x00000008 /* pi exit done on shut down */ #define PF_VCPU 0x00000010 /* I‘m a virtual CPU */ #define PF_WQ_WORKER 0x00000020 /* I‘m a workqueue worker */ #define PF_FORKNOEXEC 0x00000040 /* forked but didn‘t exec */ #define PF_MCE_PROCESS 0x00000080 /* process policy on mce errors */ #define PF_SUPERPRIV 0x00000100 /* used super-user privileges */ #define PF_DUMPCORE 0x00000200 /* dumped core */ #define PF_SIGNALED 0x00000400 /* killed by a signal */ #define PF_MEMALLOC 0x00000800 /* Allocating memory */ #define PF_USED_MATH 0x00002000 /* if unset the fpu must be initialized before use */ #define PF_FREEZING 0x00004000 /* freeze in progress. do not account to load */ #define PF_NOFREEZE 0x00008000 /* this thread should not be frozen */ #define PF_FROZEN 0x00010000 /* frozen for system suspend */ #define PF_FSTRANS 0x00020000 /* inside a filesystem transaction */ #define PF_KSWAPD 0x00040000 /* I am kswapd */ #define PF_OOM_ORIGIN 0x00080000 /* Allocating much memory to others */ #define PF_LESS_THROTTLE 0x00100000 /* Throttle me less: I clean memory */ #define PF_KTHREAD 0x00200000 /* I am a kernel thread */ #define PF_RANDOMIZE 0x00400000 /* randomize virtual address space */ #define PF_SWAPWRITE 0x00800000 /* Allowed to write to swap */ #define PF_SPREAD_PAGE 0x01000000 /* Spread page cache over cpuset */ #define PF_SPREAD_SLAB 0x02000000 /* Spread some slab caches over cpuset */ #define PF_THREAD_BOUND 0x04000000 /* Thread bound to specific cpu */ #define PF_MCE_EARLY 0x08000000 /* Early kill for mce process policy */ #define PF_MEMPOLICY 0x10000000 /* Non-default NUMA mempolicy */ #define PF_MUTEX_TESTER 0x20000000 /* Thread belongs to the rt mutex tester */ #define PF_FREEZER_SKIP 0x40000000 /* Freezer should not count it as freezable */ #define PF_FREEZER_NOSIG 0x80000000 /* Freezer won‘t send signals to it */
5、表示进程亲属关系的成员
struct task_struct *real_parent; /* real parent process */ struct task_struct *parent; /* recipient of SIGCHLD, wait4() reports */ struct list_head children; /* list of my children */ struct list_head sibling; /* linkage in my parent‘s children list */ struct task_struct *group_leader; /* threadgroup leader */
在Linux系统中,所有进程之间都有着直接或间接地联系,每个进程都有其父进程,也可能有零个或多个子进程。拥有同一父进程的所有进程具有兄弟关系。
real_parent指向其父进程,如果创建它的父进程不再存在,则指向PID为1的init进程。
parent指向其父进程,当它终止时,必须向它的父进程发送信号。它的值通常与real_parent相同。
children表示链表的头部,链表中的所有元素都是它的子进程。
sibling用于把当前进程插入到兄弟链表中。
group_leader指向其所在进程组的领头进程。
6、ptrace系统调用
unsigned int ptrace; struct list_head ptraced; struct list_head ptrace_entry; unsigned long ptrace_message; siginfo_t *last_siginfo; /* For ptrace use. */ ifdef CONFIG_HAVE_HW_BREAKPOINT atomic_t ptrace_bp_refcnt; endif
成员ptrace被设置为0时表示不需要被跟踪,它的可能取值如下:
/* linux-2.6.38.8/include/linux/ptrace.h */ #define PT_PTRACED 0x00000001 #define PT_DTRACE 0x00000002 /* delayed trace (used on m68k, i386) */ #define PT_TRACESYSGOOD 0x00000004 #define PT_PTRACE_CAP 0x00000008 /* ptracer can follow suid-exec */ #define PT_TRACE_FORK 0x00000010 #define PT_TRACE_VFORK 0x00000020 #define PT_TRACE_CLONE 0x00000040 #define PT_TRACE_EXEC 0x00000080 #define PT_TRACE_VFORK_DONE 0x00000100 #define PT_TRACE_EXIT 0x00000200
7、进程调度
int prio, static_prio, normal_prio; unsigned int rt_priority; const struct sched_class *sched_class; struct sched_entity se; struct sched_rt_entity rt; unsigned int policy; cpumask_t cpus_allowed;
实时优先级范围是0到MAX_RT_PRIO-1(即99),而普通进程的静态优先级范围是从MAX_RT_PRIO到MAX_PRIO-1(即100到139)。值越大静态优先级越低。
/* linux-2.6.38.8/include/linux/sched.h */ #define MAX_USER_RT_PRIO 100 #define MAX_RT_PRIO MAX_USER_RT_PRIO #define MAX_PRIO (MAX_RT_PRIO + 40) #define DEFAULT_PRIO (MAX_RT_PRIO + 20)
static_prio用于保存静态优先级,可以通过nice系统调用来进行修改。
rt_priority用于保存实时优先级。
normal_prio的值取决于静态优先级和调度策略。
prio用于保存动态优先级。
policy表示进程的调度策略,目前主要有以下五种:
#define SCHED_NORMAL 0 #define SCHED_FIFO 1 #define SCHED_RR 2 #define SCHED_BATCH 3 /* SCHED_ISO: reserved but not implemented yet */ #define SCHED_IDLE 5
SCHED_NORMAL用于普通进程,通过CFS调度器实现。SCHED_BATCH用于非交互的处理器消耗型进程。SCHED_IDLE是在系统负载很低时使用。
SCHED_FIFO(先入先出调度算法)和SCHED_RR(轮流调度算法)都是实时调度策略。
sched_class结构体表示调度类,目前内核中有实现以下四种:
/* linux-2.6.38.8/kernel/sched_fair.c */ static const struct sched_class fair_sched_class; /* linux-2.6.38.8/kernel/sched_rt.c */ static const struct sched_class rt_sched_class; /* linux-2.6.38.8/kernel/sched_idletask.c */ static const struct sched_class idle_sched_class; /* linux-2.6.38.8/kernel/sched_stoptask.c */ static const struct sched_class stop_sched_class;
se和rt都是调用实体,一个用于普通进程,一个用于实时进程,每个进程都有其中之一的实体。
本文出自 “一起去看星星” 博客,转载请与作者联系!
以上是关于Linux进程管理---task_struct的主要内容,如果未能解决你的问题,请参考以下文章