单目测距几个关键点
Posted wujianming-110117
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了单目测距几个关键点相关的知识,希望对你有一定的参考价值。
单目测距几个关键点
一.畸变矫正
相机镜头畸变矫正-->得到相机的内外参数、畸变参数矩阵
1. 外参数矩阵。世界坐标经过旋转和平移,然后落到另一个现实世界点(摄像机坐标)上。
2. 内参数矩阵。告诉你上述那个点在1的基础上,是如何继续经过摄像机的镜头、并通过针孔成像和电子转化而成为像素点的。
3. 畸变矩阵。告诉你为什么上面那个像素点并没有落在理论计算该落在的位置上,还产生了一定的偏移和变形.
二.测距步骤:
1. 使用摄像机采集道路前方的图像;
2. 在道路区域对物体进行检测,通过矩形框将物体形状框出来。
3. 结合矩形框信息,找到该矩形框底边的两个像平面坐标,分别记为(u1,v1)和(u2,v2);(opencv自带函数,输出矩形框像素点坐标)
4. 使用几何关系推导法,由像平面坐标点(u1, v1)、(u2, v2)推导出道路平面坐标(x1,y1)、(x2, y2);(投影到地面上,z轴为0)
5. 通过欧氏距离公式计算出d。
三.根据相似三角比例计算出对应像素点的实际坐标
这个方法对摄像机标定的要求比较高,同时要求镜头本身造成的畸变就比较小,但总体来说这种方法的可移植性和实用性都较强。其主要的思路还是小孔成像的模型。
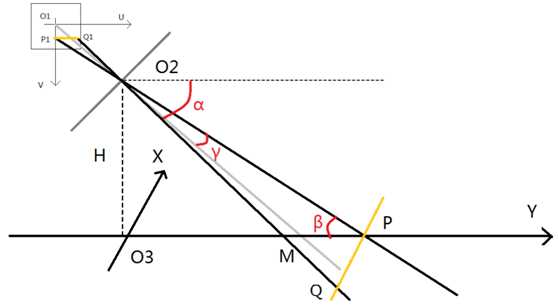
一步步推导如下:
已知量:摄像机高度H
图像坐标中心对应的世界坐标点与摄像头在y轴上的距离O3MO3M
镜头中心点的图像坐标O1(ucenter,vcenter)O1(ucenter,vcenter)
测量像素点的图像坐标P1(u,0)、Q1(u,v)P1(u,0)、Q1(u,v)
实际像素的长度xpix
实际像素的宽度ypix
摄像头焦距f
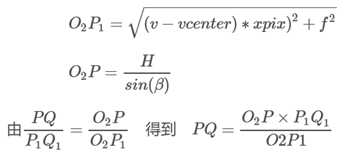
(y轴方向计算和上一个模型相同,x轴计算是y轴坐标通过比例计算得到)
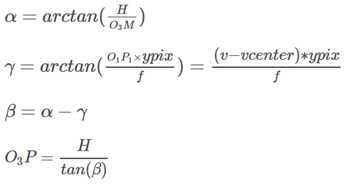
这样就可以得到垂直方向的坐标
这样就可以得到垂直方向的坐标

以上是关于单目测距几个关键点的主要内容,如果未能解决你的问题,请参考以下文章