Qt编写气体安全管理系统21-探测器管理
Posted feiyangqingyun
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Qt编写气体安全管理系统21-探测器管理相关的知识,希望对你有一定的参考价值。
一、前言
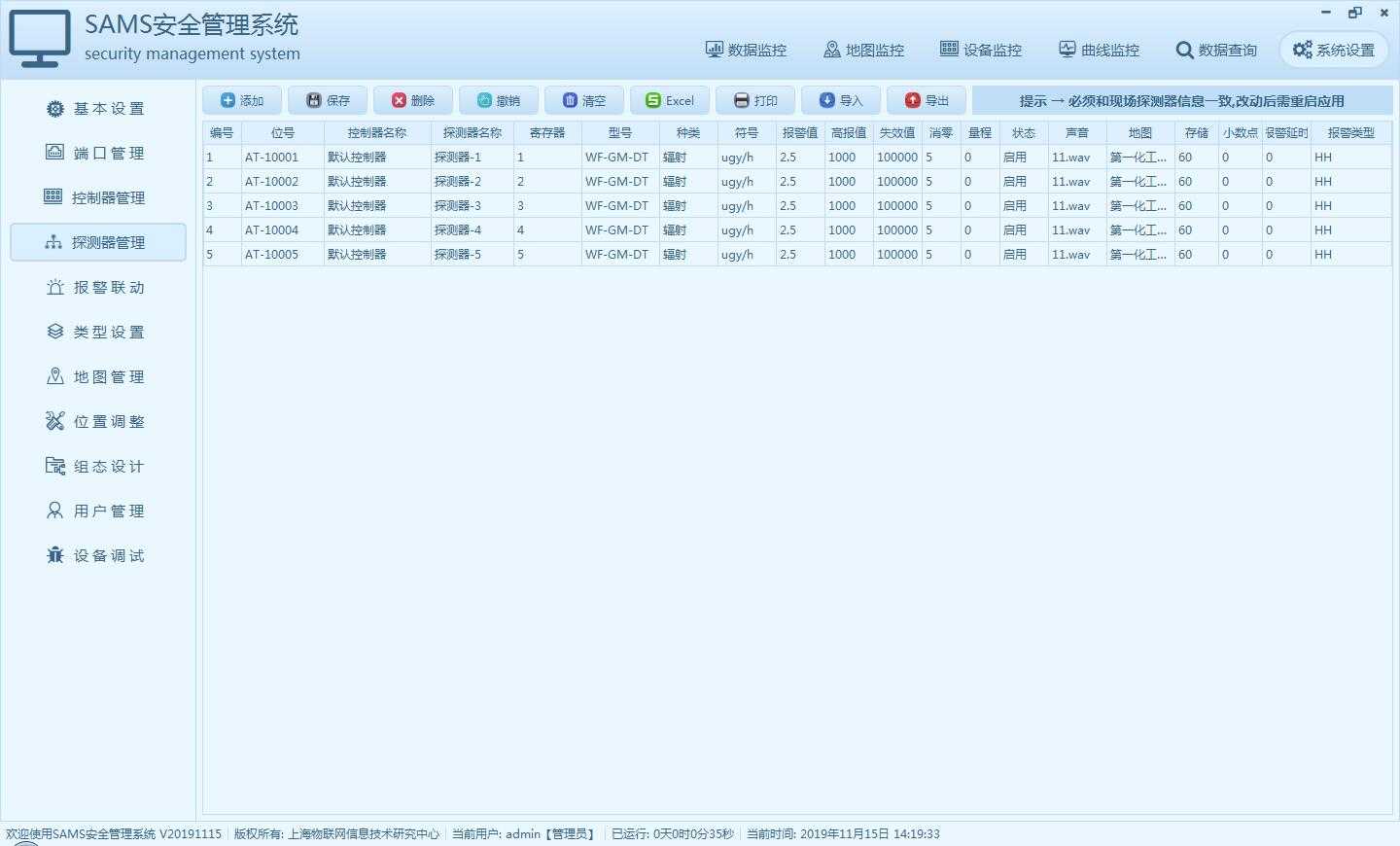
探测器在整个系统中是最核心的关键的硬件,终端节点硬件,安装有探测芯片装置,负责探测前端对应气体浓度,并记录值,等待控制器轮训数据回复,控制器信息表也是字段最多的,要存储位号、控制器名称、探测器名称、寄存器地址、型号、气体种类、气体符号、上限值、下限值、最大值、消零、量程、状态、声音、地图、存储、小数点、报警延时、报警类型、X坐标、Y坐标.
各个字段的含义如下:
- 编 号:节点的编号,从1开始。
- 位 号:探测器的位置编号,用于唯一标识一个探测器。
- 控 制 器:对应挂载的主设备名称。
- 探 测 器:探测器的名称,方便记忆,可以填写地理位置。
- 地 址:探测器对应在控制器的编号索引。
- 型 号:探测器的型号,从下拉框选择。
- 气体种类:探测器对应采集的气体的种类。
- 气体型号:探测器对应采集气体的型号。
- 上 限 值:报警的上限值。
- 下 限 值:报警的下限值
- 最 大 值:最大的警戒值,超过该值则显示为该值。
- 消 零:最小的警戒值,小于该值则显示0,大于显示真实值。
- 量 程:假设量程0.25则 实际数=模拟量/4000*量程 模拟量就是采集的值。
- 状 态:默认启用,当某个探测器未接时候可以选择禁用。
- 声 音:报警后对应的声音文件。
- 地 图:探测器所位于的地图文件。
- 存 储:探测器记录存储的周期,单位分钟。即隔多久存储一次记录到本地。
- 小 数 点:计算解析数据的数据位对应的小数点位数。
- 报警延时:报警后,延时多久处理,以便过滤数据抖动偏差造成的误报。默认0。
- 报警类型:HH LL HL。
- X坐 标:探测器位于地图上的X坐标。
- Y坐 标:探测器位于地图上的Y坐标。
位号、型号、上下限这些值不需要特殊说明和处理,最大值、消零、量程、小数点这几样需要特殊提一提,最大值主要是用来过滤超过该探测器量程了,返回来一个很大的值,而界面上显示该值很不合理也很难看,比如正常温度返回一个几千度,那是不合理的,肯定是哪里出问题了,要去检查,如果界面上显示个几千度明显不符合逻辑了,需要设定个最大的值,一旦采集到的值超过了该值,则显示最大值即可,没有必要显示真实的值。消零表示有时候探测器会有一些细微的波动,甚至采集到负数的值,就需要设定一个最小值,一旦采集到的值小于该值,则显示为0,此时有可能是探测器出故障了。量程的含义是对采集到的值做一个运算,一般来说采集到的值是模拟量,需要换算成真实的值,这个量程作为一个公式进行换算。小数点是指下面探测器采集到的值可能是一个放大了100倍1000倍的数据,需要取小数点位才是真实的值,比如设定小数点位1位,则采集到的值1000真实的值为100。
报警延时和报警类型这两个是整个系统的闪光点,特色功能,报警延时是为了防止抖动误报增加的,比如设定报警延时3秒钟,那意味着收到报警以后,不要立即去报警,等到3秒钟以后再去查看该节点是否还是报警,是的话那就真的触发报警,不是的话一般来说是抖动造成的误报,不处理即可。报警类型是整个系统编码中最难的部分,难度最大,为什么呢?按照我们常人的理解来说,小于最小值叫低报,大于最大值叫高报,在最小值和最大值范围内的都是正常值,事实中并不是这种常规逻辑的,世界是简单的也是复杂的,有些情况是小于最小值是正常值,大于最小值是低报,大于最大值是高报,比如氧气,而且在气体检测行业大部分都是这种情况,这个算法逻辑当时搞了很久,就是弯转不过来。
根据设定的不同的报警类型处理,假定上限值100,下限值25
- HH表示超过25是低报,超过100是高报.
- HL表示低于25是低报,超过100是高报.
- LL表示低于25是高报,低于100是低报.
皮肤开源:https://gitee.com/feiyangqingyun/QWidgetDemo https://github.com/feiyangqingyun/QWidgetDemo
文件名称:styledemo
体验地址:https://gitee.com/feiyangqingyun/QWidgetExe https://github.com/feiyangqingyun/QWidgetExe
文件名称:bin_sams.zip
二、功能特点
- 采集数据端口,支持串口端口+网络端口,串口支持自由设置串口号+波特率,网络支持自由设置IP地址+通讯端口,每个端口支持采集周期,默认1秒钟一个地址,支持设置通讯超时次数,默认3次,支持最大重连时间,用于重新读取离线的设备。
- 控制器信息,能够添加控制器名称,选择控制器地址+控制器型号,设置该控制器下面的探测器数量。
- 探测器信息,能够添加位号,可自由选择探测器型号,气体种类,气体符号,高报值,低报值,缓冲值,清零值,是否启用,报警声音,背景地图,存储周期,数值换算小数点位数,报警延时时间,报警的类型(HH,LL,HL)等。
- 控制器型号+探测器型号+气体种类+气体符号,均可自由配置。
- 地图支持导入和删除,所有的探测器对应地图位置可自由拖动保存。
- 端口信息+控制器信息+探测器信息,支持导入导出+导出到excel+打印。
- 运行记录+报警记录+用户记录,支持多条件组合查询,比如时间段+控制器+探测器等,所有记录支持导出到excel+打印。
- 导出到excel的记录支持所有excel+wps等表格文件版本,不依赖excel等软件。
- 可删除指定时间范围内的数据,支持自动清理早期数据,设置最大保存记录数。
- 支持报警短信转发,支持多个接收手机号码,可设定发送间隔,比如即时发送或者6个小时发送一次所有的报警信息,短信内容过长,自动拆分多条短信。
- 支持报警邮件转发,支持多个接收邮箱,可设定发送间隔,比如即时发送或者6个小时发送一次所有的报警信息,支持附件发送。
- 高报颜色+低报颜色+正常颜色+0值颜色+曲线背景+曲线颜色等,都可以自由选择。
- 软件的中文标题+英文标题+logo路径+版权所有都可以自由设置。
- 提供开关设置开机运行+报警声音+自动登录+记住密码等。
- 报警声音可设置播放次数,界面提供17种皮肤文件选择。
- 支持云端数据同步,可设置云端数据库的信息,比如数据库名称,用户名+密码等。
- 支持网络转发和网络接收,网络接收开启后,软件从udp接收数据进行解析。网络转发支持多个目标IP,这样就实现了本地采集的软件,自由将数据转到客户端,随时查看探测器数据。
- 自动记住用户最后停留的界面+其他信息,重启后自动应用。
- 报警自动切换到对应的地图,探测器按钮闪烁。
- 双击探测器图标,可以进行回控。
- 支持用户权限管理,管理员+操作员两大类,用户登录+用户退出,可以记住密码和自动登录,超过三次报错提示并关闭程序。
- 支持四种监控模式,设备面板监控+地图监控+表格数据监控+曲线数据监控,可自由切换,四种同步应用。
- 支持报警继电器联动,一个位号可以跨串口联动多个模块和继电器号,支持多对多。
- 本地数据存储支持sqlite+mysql,支持远程数据同步到云端数据库。自动重连。
- 本地设备采集到的数据实时上传到云端,以便手机APP或者web等其他方式提取。
- 支持两种数据源,一种是串口和网络通过协议采集设备数据,一种是数据库采集。数据库采集模式可以作为通用的系统使用。
- 自带设备模拟工具,支持16个设备数据模拟,同时还带数据库数据模拟,以便在没有设备的时候测试数据。
- 默认通信协议采用modbus协议,后期增加mqtt等物联网协议的支持,做成通用系统。
- 支持所有windows操作系统+linux操作系统和其他操作系统。
三、效果图
四、核心代码
void frmConfigNode::on_btnAdd_clicked()
{
//对密钥文件中的数量限制进行过滤
int count = model->rowCount();
if (!AppKey::Instance()->checkCount(count)) {
return;
}
model->insertRow(count);
int nodeID = model->index(count - 1, 0).data().toInt() + 1;
QString positionID = model->index(count - 1, 1).data().toString();
QString deviceName = model->index(count - 1, 2).data().toString();
QString nodeName = model->index(count - 1, 3).data().toString();
int nodeAddr = model->index(count - 1, 4).data().toInt() + 1;
QString nodeType = model->index(count - 1, 5).data().toString();
QString nodeClass = model->index(count - 1, 6).data().toString();
QString nodeSign = model->index(count - 1, 7).data().toString();
float nodeUpper = model->index(count - 1, 8).data().toFloat();
float nodeLimit = model->index(count - 1, 9).data().toFloat();
float nodeMax = model->index(count - 1, 10).data().toFloat();
float nodeMin = model->index(count - 1, 11).data().toFloat();
float nodeRange = model->index(count - 1, 12).data().toFloat();
QString nodeEnable = model->index(count - 1, 13).data().toString();
QString nodeSound = model->index(count - 1, 14).data().toString();
QString nodeImage = model->index(count - 1, 15).data().toString();
int saveInterval = model->index(count - 1, 16).data().toInt();
int dotCount = model->index(count - 1, 17).data().toInt();
int alarmDelay = model->index(count - 1, 18).data().toInt();
QString alarmType = model->index(count - 1, 19).data().toString();
int nodeX = model->index(count - 1, 20).data().toInt();
int nodeY = model->index(count - 1, 21).data().toInt();
//位号末尾数字的话自动递增
int id = positionID.right(3).toInt();
if (id > 0) {
positionID = QString("%1%2").arg(positionID.left(positionID.length() - 3)).arg(id + 1, 3, 10, QChar('0'));
}
//位置递增
nodeX += App::DeviceWidth + 5;
if (nodeX > App::MapWidth - 100) {
nodeX = 5;
nodeY += App::DeviceHeight + 5;
}
//自动填充末尾序号递增
if (nodeName.startsWith("探测器-")) {
nodeName = QString("探测器-%1").arg(nodeAddr);
} else if (nodeName.startsWith("设备-")) {
nodeName = QString("设备-%1").arg(nodeAddr);
} else if (nodeName.startsWith("设备#")) {
nodeName = QString("设备#%1").arg(nodeAddr);
} else if (nodeName.startsWith("设备")) {
nodeName = QString("设备%1").arg(nodeAddr);
}
if (count == 0) {
nodeID = 1;
positionID = "AT-40001";
deviceName = DBData::DeviceInfo_Count > 0 ? DBData::DeviceInfo_DeviceName.first() : "1#调度室控制器";
nodeName = "探测器-1";
nodeAddr = 1;
nodeType = "FT-2104";
nodeClass = "GAS";
nodeSign = "PPM";
nodeUpper = 100;
nodeLimit = 20;
nodeMax = 1000;
nodeMin = 5;
nodeRange = 0;
nodeEnable = "启用";
nodeSound = "11.wav";
nodeImage = DBData::MapNames.count() > 0 ? DBData::MapNames.first() : "无";
saveInterval = 60;
dotCount = 0;
alarmDelay = 0;
alarmType = "HH";
nodeX = 5;
nodeY = 5;
if (App::WorkMode == 2) {
positionID = "AT-10001";
nodeType = "WF-GM-DT";
nodeClass = "辐射";
nodeSign = "ugy/h";
nodeUpper = 2.5;
nodeLimit = 1000;
nodeMax = 100000;
}
}
//设置新增加的行默认值
model->setData(model->index(count, 0), nodeID);
model->setData(model->index(count, 1), positionID);
model->setData(model->index(count, 2), deviceName);
model->setData(model->index(count, 3), nodeName);
model->setData(model->index(count, 4), nodeAddr);
model->setData(model->index(count, 5), nodeType);
model->setData(model->index(count, 6), nodeClass);
model->setData(model->index(count, 7), nodeSign);
model->setData(model->index(count, 8), nodeUpper);
model->setData(model->index(count, 9), nodeLimit);
model->setData(model->index(count, 10), nodeMax);
model->setData(model->index(count, 11), nodeMin);
model->setData(model->index(count, 12), nodeRange);
model->setData(model->index(count, 13), nodeEnable);
model->setData(model->index(count, 14), nodeSound);
model->setData(model->index(count, 15), nodeImage);
model->setData(model->index(count, 16), saveInterval);
model->setData(model->index(count, 17), dotCount);
model->setData(model->index(count, 18), alarmDelay);
model->setData(model->index(count, 19), alarmType);
model->setData(model->index(count, 20), nodeX);
model->setData(model->index(count, 21), nodeY);
ui->tableView->setCurrentIndex(model->index(count, 0));
}
void frmConfigNode::on_btnSave_clicked()
{
model->database().transaction();
if (model->submitAll()) {
model->database().commit();
DBHelper::loadNodeInfo();
//先更新联动表的位号
emit positionIDChanged();
} else {
model->database().rollback();
QUIHelper::showMessageBoxError("保存信息失败,信息不能为空,请重新填写!");
}
}
void frmConfigNode::on_btnDelete_clicked()
{
if (ui->tableView->currentIndex().row() < 0) {
QUIHelper::showMessageBoxError("请选择要删除的探测器!");
return;
}
if (QUIHelper::showMessageBoxQuestion("确定要删除该探测器吗?") == QMessageBox::Yes) {
int row = ui->tableView->currentIndex().row();
model->removeRow(row);
model->submitAll();
//主动加载所有数据,不然获取到的行数<=256
while(model->canFetchMore()) {
model->fetchMore();
}
int count = model->rowCount();
ui->tableView->setCurrentIndex(model->index(count - 1, 0));
}
}
void frmConfigNode::on_btnReturn_clicked()
{
model->revertAll();
}
void frmConfigNode::on_btnClear_clicked()
{
int count = model->rowCount();
if (count <= 0) {
return;
}
if (QUIHelper::showMessageBoxQuestion("确定要清空所有探测器信息吗?") == QMessageBox::Yes) {
DBHelper::clearNodeInfo();
model->select();
}
}以上是关于Qt编写气体安全管理系统21-探测器管理的主要内容,如果未能解决你的问题,请参考以下文章