ROM 装甲板识别 蓝色车识别
Posted fanxiaohao
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROM 装甲板识别 蓝色车识别相关的知识,希望对你有一定的参考价值。
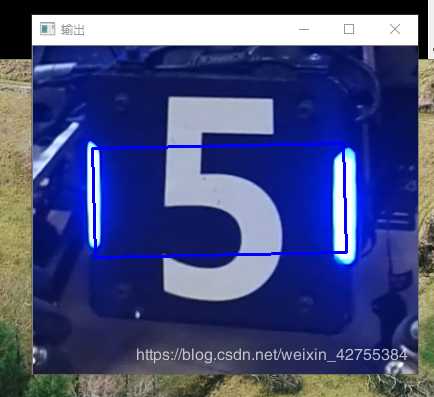
#include "opencv2/core.hpp" #include "opencv2/highgui.hpp" #include "opencv2/videoio.hpp" #include "opencv2/imgproc.hpp" #include "iostream" #include "omp.h" using namespace cv; using namespace std; int a = 0; #define T_ANGLE_THRE 10 #define T_SIZE_THRE 5 void brightAdjust(Mat src, Mat dst, double dContrast, double dBright); //亮度调节函数 void getDiffImage(Mat src1, Mat src2, Mat dst, int nThre); //二值化 vector<RotatedRect> armorDetect(vector<RotatedRect> vEllipse); //检测装甲 void drawBox(RotatedRect box, Mat img); //标记装甲 int main() { Mat frame; frame = imread("D:/A.png"); Size imgSize; RotatedRect s; //定义旋转矩形 vector<RotatedRect> vEllipse; //定以旋转矩形的向量,用于存储发现的目标区域 vector<RotatedRect> vRlt; vector<RotatedRect> vArmor; bool bFlag = false; vector<vector<Point> > contour; imgSize = frame.size(); Mat rawImg = Mat(imgSize, CV_8UC3); Mat grayImage = Mat(imgSize, CV_8UC1); Mat rImage = Mat(imgSize, CV_8UC1); Mat gImage = Mat(imgSize, CV_8UC1); Mat bImage = Mat(imgSize, CV_8UC1); Mat binary = Mat(imgSize, CV_8UC1); Mat rlt = Mat(imgSize, CV_8UC1); namedWindow("输出"); brightAdjust(frame, rawImg, 1, -120); //每个像素每个通道的值都减去120 Mat bgr[3]; split(rawImg, bgr); //通道分离函数 bImage = bgr[0]; gImage = bgr[1]; rImage = bgr[2]; //如果像素R值-G值大于25,则返回的二值图像的值为255,否则为0 getDiffImage(bImage, rImage, binary,105); dilate(binary, grayImage, Mat(), Point(-1, -1), 3); //图像膨胀 erode(grayImage, rlt, Mat(), Point(-1, -1), 1); //图像腐蚀,先膨胀在腐蚀属于闭运算 findContours(rlt, contour, RETR_CCOMP, CHAIN_APPROX_SIMPLE); //在二值图像中寻找轮廓 for (int i = 0; i < contour.size(); i++) { if (contour[i].size() > 10) //判断当前轮廓是否大于10个像素点 { bFlag = true; //如果大于10个,则检测到目标区域 //拟合目标区域成为椭圆,返回一个旋转矩形(中心、角度、尺寸) s = fitEllipse(contour[i]); for (int nI = 0; nI < 5; nI++) { for (int nJ = 0; nJ < 5; nJ++) //遍历以旋转矩形中心点为中心的5*5的像素块 { if (s.center.y - 2 + nJ > 0 && s.center.y - 2 + nJ < 328 && s.center.x - 2 + nI > 0 && s.center.x - 2 + nI < 385) //判断该像素是否在有效的位置 { Vec3b v3b = frame.at<Vec3b>((int)(s.center.y - 2 + nJ), (int)(s.center.x - 2 + nI)); //获取遍历点点像素值 //判断中心点是否接近白色 if (v3b[0] < 200 || v3b[1] < 200 || v3b[2] < 200) bFlag = false; //如果中心不是白色,则不是目标区域 } } } if (bFlag) { vEllipse.push_back(s); //将发现的目标保存 } } } //调用子程序,在输入的LED所在旋转矩形的vector中找出装甲的位置,并包装成旋转矩形,存入vector并返回 vRlt = armorDetect(vEllipse); for (unsigned int nI = 0; nI < vRlt.size(); nI++) //在当前图像中标出装甲的位置 drawBox(vRlt[nI], frame); imshow("输出", frame); waitKey(); vEllipse.clear(); vRlt.clear(); vArmor.clear(); return 0; } //每个通道的数值 - 120,小于零 = 0,大于255则 = 255,用于突出LED灯带所在区域 void brightAdjust(Mat src, Mat dst, double dContrast, double dBright) { int nVal; omp_set_num_threads(8); #pragma omp parallel for for (int nI = 0; nI < src.rows; nI++) { Vec3b* p1 = src.ptr<Vec3b>(nI); Vec3b* p2 = dst.ptr<Vec3b>(nI); for (int nJ = 0; nJ < src.cols; nJ++) { for (int nK = 0; nK < 3; nK++) { //每个像素的每个通道的值都进行线性变换 nVal = (int)(dContrast * p1[nJ][nK] + dBright); if (nVal < 0) nVal = 0; if (nVal > 255) nVal = 255; p2[nJ][nK] = nVal; } } } } void getDiffImage(Mat src1, Mat src2, Mat dst, int nThre) { omp_set_num_threads(8); #pragma omp parallel for for (int nI = 0; nI < src1.rows; nI++) { uchar* pchar1 = src1.ptr<uchar>(nI); uchar* pchar2 = src2.ptr<uchar>(nI); uchar* pchar3 = dst.ptr<uchar>(nI); for (int nJ = 0; nJ < src1.cols; nJ++) { if (pchar1[nJ] - pchar2[nJ] > nThre) // { pchar3[nJ] = 255; } else { pchar3[nJ] = 0; } } } } vector<RotatedRect> armorDetect(vector<RotatedRect> vEllipse) { vector<RotatedRect> vRlt; RotatedRect armor; //定义装甲区域的旋转矩形 int nL, nW; double dAngle; vRlt.clear(); if (vEllipse.size() < 2) //如果检测到的旋转矩形个数小于2,则直接返回 return vRlt; for (unsigned int nI = 0; nI < vEllipse.size() - 1; nI++) //求任意两个旋转矩形的夹角 { for (unsigned int nJ = nI + 1; nJ < vEllipse.size(); nJ++) { dAngle = abs(vEllipse[nI].angle - vEllipse[nJ].angle); while (dAngle > 180) dAngle -= 180; //判断这两个旋转矩形是否是一个装甲的两个LED等条 if ((dAngle < T_ANGLE_THRE || 180 - dAngle < T_ANGLE_THRE) && abs(vEllipse[nI].size.height - vEllipse[nJ].size.height) < (vEllipse[nI].size.height + vEllipse[nJ].size.height) / T_SIZE_THRE && abs(vEllipse[nI].size.width - vEllipse[nJ].size.width) < (vEllipse[nI].size.width + vEllipse[nJ].size.width) / T_SIZE_THRE) { armor.center.x = (vEllipse[nI].center.x + vEllipse[nJ].center.x) / 2; //装甲中心的x坐标 armor.center.y = (vEllipse[nI].center.y + vEllipse[nJ].center.y) / 2; //装甲中心的y坐标 armor.angle = (vEllipse[nI].angle + vEllipse[nJ].angle) / 2; //装甲所在旋转矩形的旋转角度 if (180 - dAngle < T_ANGLE_THRE) armor.angle += 90; nL = (vEllipse[nI].size.height + vEllipse[nJ].size.height) / 2; //装甲的高度 nW = sqrt((vEllipse[nI].center.x - vEllipse[nJ].center.x) * (vEllipse[nI].center.x - vEllipse[nJ].center.x) + (vEllipse[nI].center.y - vEllipse[nJ].center.y) * (vEllipse[nI].center.y - vEllipse[nJ].center.y)); //装甲的宽度等于两侧LED所在旋转矩形中心坐标的距离 if (nL < nW) { armor.size.height = nL; armor.size.width = nW; } else { armor.size.height = nW; armor.size.width = nL; } vRlt.push_back(armor); //将找出的装甲的旋转矩形保存到vector } } } return vRlt; } void drawBox(RotatedRect box, Mat img) { Point2f pt[4]; int i; for (i = 0; i < 4; i++)
{ pt[i].x = 0; pt[i].y = 0; } box.points(pt);//计算二维盒子顶点 line(img, pt[0], pt[1], CV_RGB(0, 0, 255), 2, 8, 0); line(img, pt[1], pt[2], CV_RGB(0, 0, 255), 2, 8, 0); line(img, pt[2], pt[3], CV_RGB(0, 0, 255), 2, 8, 0); line(img, pt[3], pt[0], CV_RGB(0, 0, 255), 2, 8, 0); }
以上是关于ROM 装甲板识别 蓝色车识别的主要内容,如果未能解决你的问题,请参考以下文章