图文解析 Dijkstra单源最短路径算法
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了图文解析 Dijkstra单源最短路径算法相关的知识,希望对你有一定的参考价值。
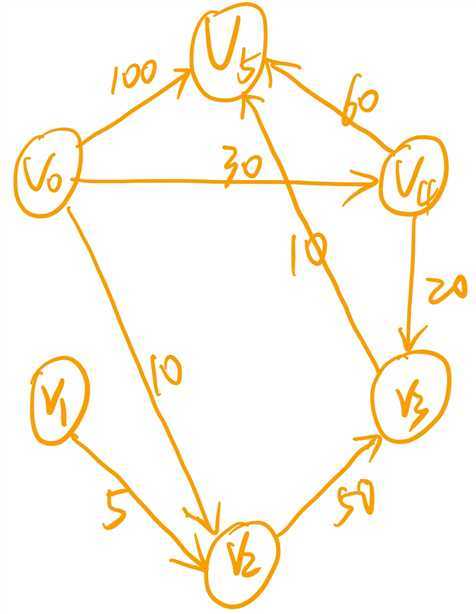
参考技术A 给定 加权有向图 G=(V,E,W),每条边的权值w为 非负数 ,表示两个顶点间的距离。源点s∈V。
求:从s出发到其他各个顶点的最短路径。
如上图所示,以1为源点,计算到其余各个顶点的最短距离(我已用红线标出)。下面列出了最终解:
S集合 :当从s到x(x ∈V )的最短路径找到时,则x ∈S。当所有顶点都进入S集合时,算法结束。
初始:S={s},当S=V时算法结束。
从s到u相对于S的最短路径 :指从s到u且仅经过S中顶点的最短路径。
dist[u]:从s到u相对于S的最短路径长度
short[u]:从s到u最短路径的长度(算法最终解)
dist[u] ≥ short[u]
Dijkstra算法采用贪心算法模式,算法过程就是通过计算dist[u],不断扩充S集合,同时dist[u]会不断优化改善,直到dist[u] = short[u],并将其放到S中,当所有顶点都放入S集合时,算法结束。
输入:加权有向图G=(V,E,W)
V=1,2,…,n, s=1
输出:从s到每个顶点的最短路径
输入:G=(V,E,W),源点1
V=1,2,3,4,5,6
初始S集合只有1,计算直接从1能到达的顶点的距离,其他不能从1号顶点直接到达的顶点都记为无穷大。此时从dist[u]里找出最短距离的顶点(6号),并将其放进S集合。
S=1
dist[1] = 0
dist[2] = 10
dist[6 ] = 3
dist[3] = ∞
dist[4] = ∞
dist[5] = ∞
当把6号顶点放进S集合后,经由6号顶点出发到达的顶点的最短距离可能会被优化更新,因为该算法的思想很“贪心”,谁更短我要谁!比如1->6->2要比1->2距离更短,所以dist[2]被更新为5,从专业术语上讲,这个“更新”过程叫做松弛,其他点同理。然后从dist[u]里找出最短的路径的那个顶点(5号),并放进S集合里。
S=1,6
dist[1] = 0
dist[6] = 3
dist[2] = 5
dist[4] = 9
dist[5] = 4
dist[3] = ∞
后面的操作步骤其实就是重复上面的操作。即当S集合里有个新的顶点后,就可能会更新其他点的最短距离,更新一遍后,找出当前最短距离的dist[u],并将该顶点放进S集合。后面不重复阐述。
S=1,6,5
dist[1] = 0
dist[6] = 3
dist[5] = 4
dist[2] = 5
dist[4] = 9
dist[3] = ∞
S=1,6,5,2
dist[1] = 0
dist[6] = 3
dist[5] = 4
dist[2] = 5
dist[4] = 9
dist[3] = 12
S=1,6,5,2,4
dist[1] = 0
dist[6] = 3
dist[5] = 4
dist[2] = 5
dist[4] = 9
dist[3] = 12
S=1,6,5,2,4,3
dist[1] = 0
dist[6] = 3
dist[5] = 4
dist[2] = 5
dist[4] = 9
dist[3] = 12
当有向图中的所有顶点都进入了S集合后,算法结束,此时的dist[u]的值其实就是最初我们找出的那个最终解short[u],所以,算法结束时,dist[u]=short[u],得到最终解。
[C++]单源最短路径:迪杰斯特拉(Dijkstra)算法(贪心算法)
1 Dijkstra算法
1.1 算法基本信息
- 解决问题/提出背景
- 单源最短路径(在带权有向图中,求从某顶点到其余各顶点的最短路径)
- 算法思想
- 贪心算法
- 按路径长度递增的次序,依次产生最短路径的算法
- 【适用范围】Dijkstra算法仅适用于【权重为正】的图模型中
- 贪心算法
- 时间复杂度
- O(n^3)
- 补充说明
- 亦可应用于【多源最短路径】(推荐:Floyd算法(动态规划,O(n^3)))
Dijkstra 时间复杂度:O(n^3)
1.2 算法描述
- 亦可应用于【多源最短路径】(推荐:Floyd算法(动态规划,O(n^3)))
- 1.2.1 求解过程(具体思路)
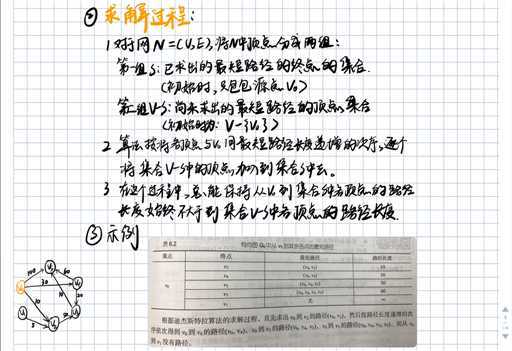
- 1.2.2 示例
1.2 编程复现
- 1> 定义图模型(邻接矩阵表示法)的【基本存储结构体】
# define MaxInt 32767 // 表示极大值 即 ∞ (无穷大)
# define MVNum 100 // 最大顶点数
typedef int VertexType; // 假设顶点的数据类型为整型
typedef int ArcType; // 假设Vi与Vj之边的权值类型为整型
typedef struct
VertexType vexs[MVNum]; // 顶点表 (存储顶点信息)
ArcType arcs[MVNum][MVNum]; // 邻接矩阵
int vexnum,arcnum; // 图的当前顶点数与边数
AMGraph; // Adjacent Matrix Graph 邻接矩阵图 - 2> 定义 Dijkstra 算法的【辅助数据结构体】
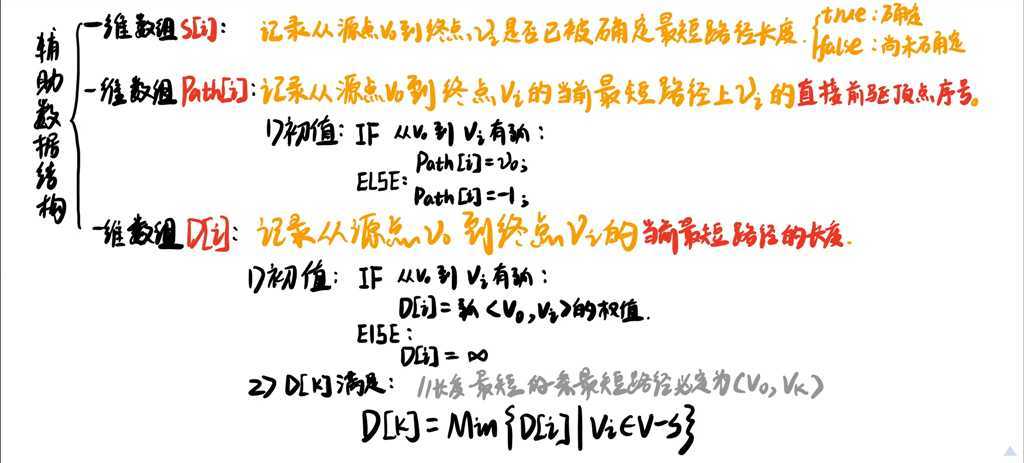
bool S[MVNum]; // S[i] 记录从源点V0到终点Vi是否已被确定为最短路径长度 【划分确定与未确定: 跟贪心算法的适用范围(不可取消性)有直接联系】
// true:表已确定;false:表尚未确定
ArcType D[MVNum]; // D[i] 记录从源点V0到终点Vi的【当前】最短路径【长度】
int Path[MVNum]; // Path[i] 记录从源点V0到终点Vi的【当前】最短路径上【Vi的[直接前驱]的顶点序号】 - 3> 初始化(邻接矩阵)带权有向图的图模型
void InitAMGraph(AMGraph &G)
cout<<"Please Input Vertexs Number:";
cin>>G.vexnum;
cout<<"\\nPlease Directed Edges Number:";
cin>>G.arcnum;
for(int i=0;i<MVNum;i++)
for(int j=0;j<MVNum;j++)
if(i!=j) // 【易错】 初始化<Vi, Vj>时: <Vi,Vj> 路径长度无穷大 (i!=j)
G.arcs[i][j] = MaxInt;
else // 【易错】 初始化<Vi, Vj>时: <Vi,Vi>【自回环】路径长度为0 (i==i)
G.arcs[i][j] = 0;
for(int i=0;i<G.vexnum;i++)
G.vexs[i] = i;
cout<<"\\nPlease Input All Directed Edges and their Weight now:";
cout<<"\\nDirected Edges(i,j,weight): "<<endl;
int i,j;
int weight;
for(int k=0;k<G.arcnum;k++)
// cout<<"("<<(k+1)<<") ";
cin>>i;cin>>j;cin>>weight;
G.arcs[i][j] = weight;
cout<<endl;
- 4> Dijkstra算法:求解单源最短路径
void ShortestPath_Dijkstra(AMGraph G, int V0)
//step1 n个顶点依次初始化
int n =G.vexnum;
for(int v=0;v<n;v++)
S[v] = false;
D[v] = G.arcs[V0][v];
if(D[v]<MaxInt)
Path[v] = V0;
else
Path[v] = -1;
//step2 将源点V0划入已确定集合S中
S[V0] = true;
D[V0] = 0; // 源点V0到源点V0的最短路径长度必然为0
//step3 贪心算法策略:
// 3.1 循环遍历所有结点:
// 3.2 先确定当前最短路径的终点v;
// 3.3 然后,将v划入已确定集合S中;
// 3.4 最后,以利用结点v更新所有尚未确定的结点的最短路径
int v;
int min;
D[G.vexnum] = MaxInt;
for(int i=1;i<n;i++)//3.1循环遍历所有结点 (即 求从源点V0到图中每一顶点(共计n-1个顶点)的最短路径)
//3.2 确定当前最短路径的终点v;
min = MaxInt;
for(int w=0;w<n;w++)
if(S[w]==false && D[w]<min)//比本轮循环中,已知的最短路径还短 【易错/易漏】 S[w]==false : 必须满足当前结点 Vw 属于尚未确定的结点
v = w;
min = D[w];
//3.3 然后,将v划入已确定集合S中;
S[v] = true;
//3.4 最后,以利用结点v更新所有尚未确定的结点的最短路径
for(int w=0;w<n;w++)
//↓更新Vw结点的最短路径长度为 D[v] + G.arcs[v][w]
//cout<<"S["<<w<<"]:"<<S[w]<<"D["<<v<<"]"<<D[v]<<"G.arcs["<<v<<"]["<<w<<"]"<<"D["<<w<<"]"<<D[w]<<endl;
if(S[w]==false && (D[v] + G.arcs[v][w] < D[w]))//【易错/易漏】 S[w]==false : 必须满足当前结点 Vw 属于尚未确定的结点
D[w] = D[v] + G.arcs[v][w];
Path[w] = v; // 更新 结点Vw的前驱为 v
v = G.vexnum;
- 5> 输出结果 D[i]、Path[j]
void OutputD(AMGraph G, int V0)
cout<<"Shortest Distance Weight of the Pair of Directed Vertices("<<V0<<", j):"<<endl;
for(int j=0;j<G.vexnum;j++)
cout<<D[j]<<"\\t";
cout<<endl;
void OutputPath(AMGraph G,int V0)
cout<<"Shortest Distance Path("<<V0<<",j) of the Pair of Directed Vertices:"<<endl;
for(int j=0;j<G.vexnum;j++)
cout<<Path[j]<<"\\t";
cout<<endl;
- 6> 执行:Main函数
int main()
int V0; //源点V0的下标
AMGraph G;
InitAMGraph(G);
cout<<"Please Input the Index of Source Node 'V0':";
cin>>V0;
ShortestPath_Dijkstra(G, V0);
OutputD(G, V0);
OutputPath(G, V0);
return 0;
- 7> Test: Output of Main
Please Input Vertexs Number:6
Please Directed Edges Number:8
Please Input All Directed Edges and their Weight now:
Directed Edges(i,j,weight):
1 2 5
0 2 10
3 5 10
4 3 20
0 4 30
2 3 50
4 5 60
0 5 100
Please Input the Index of Source Node 'V0':0
Shortest Distance Weight of the Pair of Directed Vertices(0, j):
0 32767 10 50 30 60
Shortest Distance Path(0,j) of the Pair of Directed Vertices:
0 -1 0 4 0 32 参考文献
- 《数据结构(C语言版/ 严蔚敏 李冬梅 吴伟民 编)》
以上是关于图文解析 Dijkstra单源最短路径算法的主要内容,如果未能解决你的问题,请参考以下文章