OpenCV基础
Posted details-k
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了OpenCV基础相关的知识,希望对你有一定的参考价值。
说明:本文是我学习《TensorFlow深度学习应用实战》一书第5章知识的一个总结与实验过程,一方面是希望记录下自己的学习经历;另一方面是希望通过自己学习过程中的经历分享出来,相互学习,相互交流,共同成长。(本人刚学,所以很菜,请各位大佬勿喷,谢谢!)
一、简介
OpenCV:全称(Open Source Computer Vision Library),它是Intel公司所支持开发的一个计算机视觉处理开源软件库,采用C和C++编写,同时提供了Python、Matlab等语言的接口,并且可以自由地运行在Linux/Windows/Mac等多平台操作系统上。
OpenCV的目标是让使用者能够通过合理的使用和搭配,构建一个简单易用的计算机视觉处理框架,能够便捷地设计更为复杂的计算机视觉的相关应用,而且OpenCV充分利用了Intel处理器的高性能多媒体函数库的手工优化性能,提高了运行速度。
目前来说,OpenCV所包含的能够进行视觉处理的函数和方法接近1000个,已经能够极大地满足各行各业的需求,覆盖了如医学影像、设计外观、定位标记、生物体检测等多个行业领域。
二、基础应用
在进行简单的应用前,我们必须先下载安装opencv,我使用的是Anaconda 3+PyCharm,具体的做法如下:
- 根据你电脑安装的Python版本,下载对应的opencv .whl文件,下载地址为:https://www.lfd.uci.edu/~gohlke/pythonlibs/
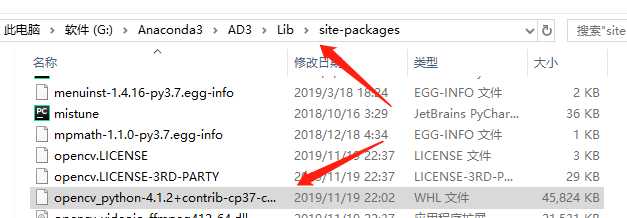
(注:我电脑安装的Python版本是Python 3.7.3,所以我下载的opencv .whl文件如下图所示:蓝色圈代表的是你电脑安装的Python版本)
- 将1中下载好的.whl文件移动到你电脑安装 Anaconda路径的site-packages目录下,然后打开你的Anaconda Prompt命令窗口,将当前目录转变成你电脑安装Anaconda路径的site-packages目录下,然后在命令行输入:pip install 你下载的.whl文件的全称并回车,则开始安装(注:我的做法如下):

(因我之前已成功安装,故而输入此命令时显示Requirement already satisfied)
2.1、图片基本读取和显示
- 创建一个300*300的矩阵,并将其以test名称的图片形式输出显示:
import numpy as np import cv2 #创建一个长、宽各300的矩阵(300*300像素的图片),各点的值为0 img=np.mat(np.zeros((300,300))) #输出图片 cv2.imshow("test",img) #使输出的图像暂时等待 cv2.waitKey(0)
输出效果如下:(该矩阵中每个具体的数值为0,故每个像素点的颜色为黑色)
-
将 1 中的一维图片转化成三维(RGB)图片:
import numpy as np import cv2 #创建一个长、宽各300的矩阵(300*300像素的图片),各点的值为0 img=np.mat(np.zeros((300,300)),dtype="uint8") #强制将原始的一维图片转化为三维图片 img=cv2.cvtColor(img,cv2.COLOR_GRAY2BGR) #打印出通道数目 print(img.shape)
输出结果:

- 读取当前目录下的 picture1.jpg 图片,并将其格式转换成 .png 存储在当前目录下:
import numpy as np import cv2 #读取当前目录下的picture1.jpg图片,读取为灰度图 image=cv2.imread("picture1.jpg",cv2.IMREAD_GRAYSCALE) #将所读取的图片的格式变成.png格式,存储在当前目录下 cv2.imwrite("picture1s.png",image)
代码执行前当前工作目录:
代码执行后当前工作目录:
picture1.jpg与picture1s.png效果对比:


-
图像的转换:将生成的一个 [300,300] 的矩阵按数组的形式转化并打印,之后通过调用NumPy中数组处理函数重新将其重构并显示:
import numpy as np import cv2 image=np.mat(np.zeros((300,300))) #减少图片的存储占用空间 imageByteArray=bytearray(image) #打印存储格式 print(imageByteArray) #通过矩阵重构的方法还原为原本的图片矩阵 imageBGR=np.array(imageByteArray).reshape(300,300) cv2.imshow("cool",imageBGR) cv2.waitKey(0)
输出结果:

随机生成一个长度为120000的数组,后将其重构为 [300,400] 的矩阵:
import numpy as np import cv2 import os #随机生成一个长度为120000的数组 randomByteArray=bytearray(os.urandom(120000)) #重构为[300,400]的矩阵 flatNumpyArray=np.array(randomByteArray).reshape(300,400) cv2.imshow("cool",flatNumpyArray) cv2.waitKey(0)
输出结果:

- 对图像进行编辑:通过对数组的操作修改图片的颜色:
import numpy as np import cv2 #生成一个300*300矩阵 img=np.zeros((300,300)) #将矩阵的[0,0]位置数值修改为255 img[0,0]=255 cv2.imshow("img",img) cv2.waitKey(0)
输出结果:(红色箭头所指:修改的位置的颜色由原先的黑色变成白色)
由此拓展,对一行或一列进行操作:
import numpy as np import cv2 #生成一个300*300矩阵 img=np.zeros((300,300)) #将第10列逐行向下位置的数值修改为255 img[:,10]=255 #将第10行逐列向右位置的数值修改为255 img[10,:]=255 cv2.imshow("img",img) cv2.waitKey(0)
输出结果:(画出了横竖两条白线)
2.2、OpenCV的卷积核处理
- 对于计算机视觉处理来说,一般常用的色彩空间有三种,即灰度、BGR以及HSV:
a)灰度:将图片中的彩色信息去掉,只保留黑白信息的色彩空间成为灰度空间。一般而言灰度空间对于人脸的处理特别有效。
b)BGR:即蓝绿红空间。在这个空间中,每个像素都是由一个三维数组表示,分别代表蓝、绿、红这三种颜色。BGR也是 OpenCV 主要的色彩空间。
c)HSV:H是色调,S是饱和度,V是黑色度,一般用在数字相机对彩色图片的处理。 - 卷积核与图像特征提取:
卷积核:一种最常用的图像处理工具。主要是通过确定的核块来检测图像的某个区域,之后根据所检测的像素与其周围存在的像素的亮度差值来改变像素明亮度的工具。
例如:import numpy as np #[3,3]卷积核,用来计算中央像素与周围临近像素的亮度差值。如果一个像素比他周围的像素更加突出,就会提升其本身的亮度 kernel1=np.array([[-1,-1,-1], [-1,8,-1], [-1,-1,-1]]) #相反情况。减少中心像素的亮度,如果一个像素比其周围的像素更加昏暗,就会更进一步地减少 kernel2=np.array([[1,1,1], [1,-8,1], [1,1,1]])
用卷积核处理一张彩色图片:
import numpy as np import cv2 from scipy import ndimage #[3,3]卷积核,将读入的图像进行颜色提高 kernel1=np.array([[-1,-1,-1], [-1,8,-1], [-1,-1,-1]]) #[3,3]卷积核,将读入的图像进行颜色降低 kernel2=np.array([[1,1,1], [1,-8,1], [1,1,1]]) #读取当前目录下的lena.jpg图片 img=cv2.imread("lena.jpg",0) #ndimage:处理多维图像的函数库,其中包括图像滤波器、傅里叶变换、图像的旋转拉伸以及测量和形态学处理等 linghtImg1=ndimage.convolve(img,kernel1) linghtImg2=ndimage.convolve(img,kernel2) cv2.imshow("img1",linghtImg1) cv2.imshow("img2",linghtImg2) cv2.waitKey(0)
输出结果:(由于卷积核降低的程度较大,最后完全造成了失真)

- 卷积核进阶:
实现一个卷积核计算:
import numpy as np def convolve(dateMat,kernel): #获取输入矩阵的行列数大小 m,n=dateMat.shape #获取卷积核的行列数大小 km,kn=kernel.shape #初始化生成全为1的输出矩阵,经计算得出输出矩阵的大小为:(m-km+1)*(n-kn+1) newMat=np.ones(((m-km+1),(n-kn+1))) #初始化生成一个全为1的卷积核 tempMat=np.ones(((km),(kn))) for row in range(m-km+1): for col in range(n-kn+1): for m_k in range(km): for n_k in range(kn): #平移计算覆盖区域对应元素值的大小 tempMat[m_k,n_k]=dateMat[(row+m_k),(col+n_k)]*kernel[m_k,n_k] #求和得到输出矩阵对应每个单位矩阵的元素值 newMat[row,col]=np.sum(tempMat) return newMat
OpenCV中提供了常用的卷积核函数——fileter2D,其具体使用如下:
cv2.filter2D(src,-1,kernel,dst)
注:src是目标图片,-1是指每个目标图片的通道位深数,一般要求目标图片和生成图片的位深数一样,kernel是图片所使用的卷积核矩阵。
以上是关于OpenCV基础的主要内容,如果未能解决你的问题,请参考以下文章
[vscode]--HTML代码片段(基础版,reactvuejquery)
pyhton—opencv直线检测(HoughLines)找到最长的一条线
pyhton—opencv直线检测(HoughLines)找到最长的一条线