轨迹规划的移动机器人的轨迹规划
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了轨迹规划的移动机器人的轨迹规划相关的知识,希望对你有一定的参考价值。
参考技术A a.基于模型和基于传感器的路径规划
基于模型的方法有:c-空间法、自由空间法、网格法、四叉树法、矢量场流的几何表示法等。相应的搜索算法有A*、遗传算法等。
b.全局路径规划(GlobalPath Planning)和局部路径规划(LocalPath Planning)
自主移动机器人的导航问题要解决的是:
(1)“我现在何处?”;
(2)“我要往何处去?”;
(3)“要如何到该处去?”。
局部路径规划主要解决(1)和(3)两个问题,即机器人定位和路径跟踪问题;方法主要有:人工势场法 、模糊逻辑算法等 。
全局路径规划主要解决(2),即全局目标分解为局部目标,再由局部规划实现局部目标。主要有:可视图法 、环境分割法(自由空间法 、栅格法 )等 ;
c.离线路径规划和在线路径规划
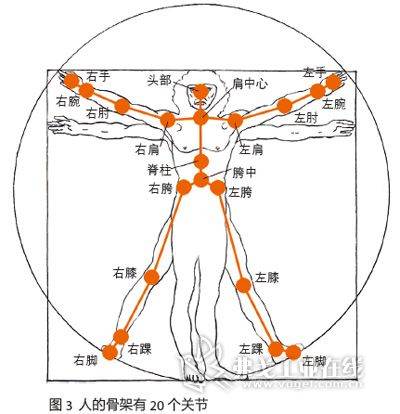
离线路径规划是基于环境先验完全信息的路径路径规划。完整的先验信息只能适用于静态环境,这种情况下,路径是离线规划的;在线路径规划是基于传感器信息的不确定环境的路径规划。在这种情况下,路径必须是在线规划的。 一般来讲,移动机器人有三个自由度(X,Y,θ),机械手有6个自由度(3个位置自由度和3个姿态自由度)。因此,移动机器人的动作规划不是在2个位置自由度(X,Y)构成的2维空间,而是要搜索位置和姿态构成的3维空间。如图所示。
机器人学 —— 轨迹规划(Artificial Potential)
今天终于完成了机器人轨迹规划的最后一次课了,拜拜自带B - BOX 的 Prof. TJ Taylor.
最后一节课的内容是利用势场来进行轨迹规划。此方法的思路非常清晰,针对Configration Space 里面的障碍物进行 DT变换,用DT变换值作为罚函数的输入,让机器人尽可能的远离障碍物,同时再终点设计抛物面函数,让机器人有向终点靠近的趋势。最后所获得的就是机器人的一种可行运动轨迹。由于此轨迹是梯度下降的,并且罚函数是连续的,所以如果机器人不陷入局部最优,那么就可以获得全局最优路径(我本人不持这样的观点,二阶Hessian矩阵大写的不服,凭什么贪婪算法是最短路径?)
1、基于DT变换生成罚函数图
DT变换是2D2值图像中的一种算法,其作用是找到某像素到最近非0像素的距离。换言之,就是机器人到最近障碍物的距离。这种距离再机器人学运动中非常容易获得,只要有实时的距离传感器,就能够找到机器人再不同位置下,到最近障碍物的距离。从而生成 f - map (罚函数图)
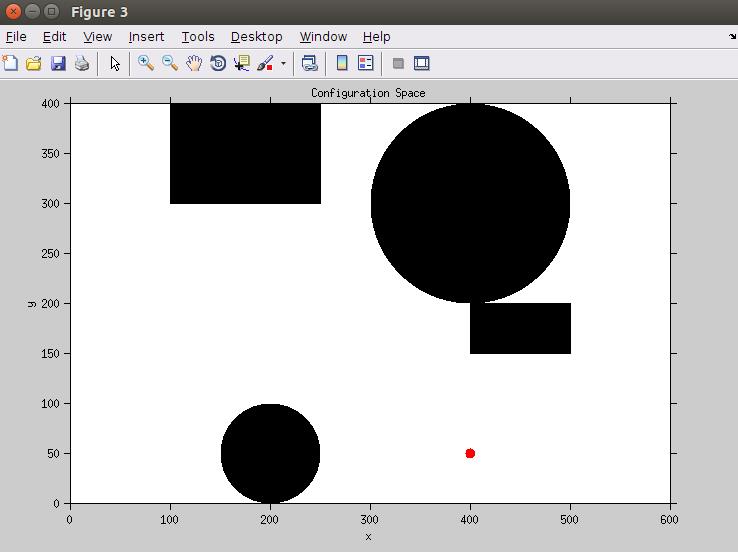
机器人的Configuration Space 与 f - map 如上图所示。
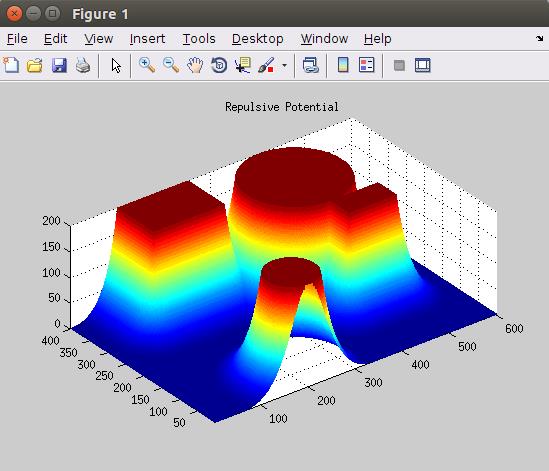
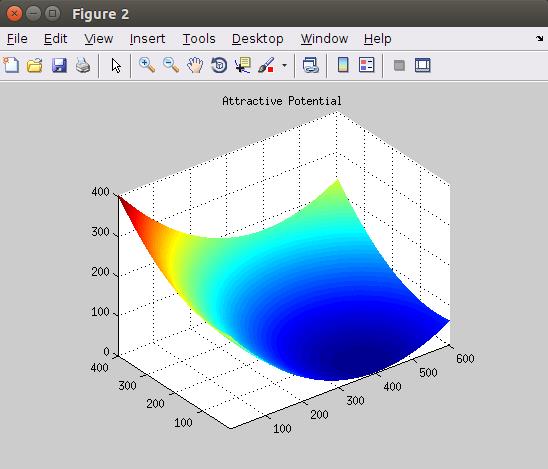
2、拉向终点的势
除了罚函数以外,机器人还需要一个拉向终点的势 —— Configuration Space 上一个以终点为中心的抛物面。将其与f - map 相加后,即可得到最终的Artificial Potential.

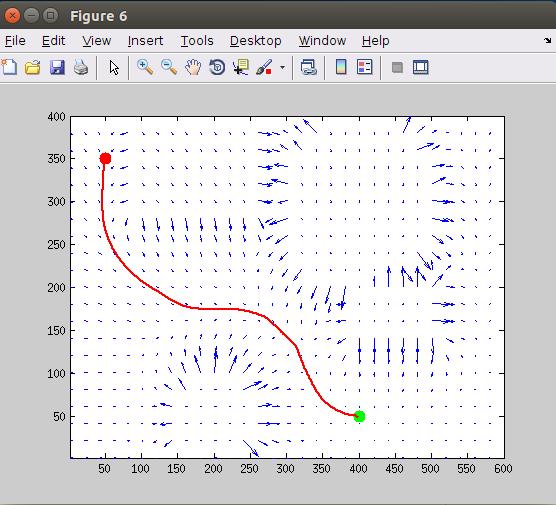
3、梯度下降
在Artificial Potential 上执行梯度下降算法,获得机器人运动轨迹。
4、总结
机器人轨迹规划是很有前景的学科,以后有前途的方向包括以下:
非同性机器人:无人汽车不能随时倒车
动力学约束下的规划:考虑机器人的加速减速
多机器人轨迹规划
针对移动障碍轨迹规划
针对不确定环境轨迹规划
以上是关于轨迹规划的移动机器人的轨迹规划的主要内容,如果未能解决你的问题,请参考以下文章