利用ERDAS对tm遥感影像分类步骤 要详细的 急急急
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了利用ERDAS对tm遥感影像分类步骤 要详细的 急急急相关的知识,希望对你有一定的参考价值。
山东科技大学测绘学院遥感系非监督分类
一、实习目的:掌握非监督分类的方法与过程,加深对非监督分类方法的理解
二 非监督分类(Unsupervised Classification)
ERDAS IMAGINE使用ISODATA算法(基于最小光谱距离公式)来进行非监督分类。聚类过程始于任意聚类平均值或一个己有分类模板的平均值:聚类每重复一次,聚类的平均值就更新一次,新聚类的均值再用于下次聚类循环。 ISODATA实用程序不断重复,直到最大的循环次数已达到设定阈值或者两次聚类结果相比有达到要求百分比的像元类别已经不再发生变化。
第一步:启动非监督分类
调出非监督分类对话框的方法有两种:
→在ERDAS图标面板工具条中单击DataPrep图标,打开Data Preparation对话框,在对话框中单击Unsupervised Classfication按钮,打开Unsupervised Classification.
→在ERDAS图标面板工具条中单击Classifier图标,打开Classification对话框,单击Unsupervised Classification按钮,打开Unsupervised Classification对话框
第二步:进行非监督分类
在Unsupervised Classification对话框进行下列设置:
→确定输入文件(Input Raster File)为germtm.img(被分类的图像)。
→确定输出文件(Output File)为germtm_isodata.img(产生的分类图像).
→选择生成分类模板文件为Output Signature Set (产生一个模板文件)。
→确定分类模板文件(File Name)为(germtm_isodata.sig)
→确定聚类参数(Clustering Options),需要确定初始聚类方法与分类数。
系统提供的初始聚类方法有两种:
Initialize from Statistics方法是按照图像的统计值产生自由聚类。
Use Signature Means方法是按照选定的模板文件进行非监督分类
确定初始分类数(Number of classes)为10(分出10个类别,实际工作中一般将初始分类数取为最终分类数的两倍以上)。
→单击Initializing Options按钮。
→打开File Statistics Options对话框,设置ISODATA的一些统计参数
→单击Color Scheme Option按钮
→打开Output Color Scheme Options对话框,设置分类图像彩色属性
→确定处理参数(Processing Options),需要确定循环次数与循环阈值
→定义最大循环次数(Maximum Iterations)为24(是指ISODATA重新聚类的最多次数,是为了避免程序运行时间太长或由于没有达到聚类标准而导致的死循环,在应用中一般将循环次数设置为6次以上)
→设置循环收敛阈值(Convergence Threshold)为0.95(是指两次分类结果相比保持不变的象元所占最大百分比,是为了避免ISODATA无限循环下去)。
→单击OK按钮(关闭Unsupervised Classification对话框,执行非监督分类)。
三:分类方法调整
第一步:显示原图像与分类图像
在视窗中同时显示germtm.img和germtm_isodat.img:两
个图像的叠加顺序为germtm.img在下,germtm_isodat.img在上,germtm.img显示方式用
红(4)、绿(5)、蓝(3),保证两幅图像叠加显示 。
第二步:打开分类图像属性并调整字段显示顺序
在视窗工具条中:点击图标(或者选择Raster菜单项—--选择Tools菜单)
打开Raster工具面板
→点击Raster工具面板的图标(或者在视窗菜单条:Rster---Attributes)
→打开Raster Attribute Editor对话框
属性表中的11个记录分别对应产生的10个类及Unclassified类,每个记录都有一系列的字段。如果想看到所有字段,需要用鼠标拖动浏览条,为了方便看到关心的重要字段,需要调整字段显示顺序。
→ Raster Attribute Editor对话框菜单条:Edit→Column Properties →column properties对话框
→在Column Properties对话框中调整字段顺序,最后使Histogram、opacity、 color、 class_names四个手段的显示顺序依次排在前面。
→点击OK按钮(关闭Column properties对话框)
→返回Raster Attribute Editor对话框(lz-isodat.img的属性表)
第三步:定义类别颜色
初始分类图像是灰度图像,各类别的显示灰度是系统自动赋予的,为了提高分类图像的直观表达效果,需要重新定义类别颜色。
→ 在Raster Attribute Editor窗口(germtm_isodata的属性表):
→单击一个类别的Row字段从而选择该类别。
→右击该类别的Color字段(颜色显示区)
→在As Is色表菜单选择一种合适颜色
→重复以上操作,直到给所有类别赋予合适的颜色。
第四步:设置不透明度
→点击一个类别的ROW字段从而选择该类别
→点击该类别的Opacity字段从而进入输入状态
→在该类别的Opacity 字段中输入1,并按回车键
此时,在视窗中只有要分析类别的颜色显示在原图像的上面,其它类别都是透明的。
第五步:确定类别专题意义及其准确程度
视窗菜单条:Utility→flicker→viewer Flicker对话框→Auto Mode
本小步是设置分类图像在原图像修背景上闪烁,观察它与背景图像之间的关系从而断定该类别的专题意义,并分析其分类准确与否。
第六步:标注类别的名称和相应颜色
Raster Attribute Editor对话框
→点击刚才分析类别的ROW字段从而选择该类别
→点击该类别的class Names字段从而进入输入状态
→在该类别的Class Names字段中输入其专题意义(如居民区),并按回车键
→右键点击该类别的Color字段(颜色显示区)
→As Is菜单→选择一种合适的颜色
重复以上4、5、6三步直到对所有类别都进行了分析与处理。注意,在进行分类叠加分析时,一次可以选择一个类别,也可以选择多个类别同时进行。
第七步:类别合并与属性重定义
如果上述各步骤操作的过程中发现分类方案不够理想,需要进行分类后处理,诸如进行聚类分析、过滤分析、去处分析和分类重编码等特别是有由于给定的初始分类的数量比较多,往往需要进行类别的合并操作。
具体操作步骤:
第一步 打开重编码对话框—单击interpreter →GIS analysis →recode
在recode对话框中设置一下参数
(1)确定输入文件为germtm_isodata.img
(2)输出文件为germtm_recode.img
(3)设置新的分类编码(setup recode)
(4)根据需要改变的字段取值
(5)单击ok
在窗口中打开重编码后的分类专题图像,查看分类属性表。 参考技术A 很多类似的教程的
http://wenku.baidu.com/view/3e99d9eb172ded630b1cb65a.html
监督分类关键是你的分类体系建立和分类模板构建。是个细活,慢慢折腾吧
快速鲁棒的多模态遥感影像配准系统(可下载,支持大尺寸遥感影像),性能超越国际著名遥感商业软件ERDAS和ENVI
一、引言
近些年来,随着国产卫星的不断发射,导致各种多模态遥感影像数据集(如光学、红外、SAR、LiDAR等)呈现爆炸式的增长,对这些遥感影像广泛应用的前提是进行高精度的配准。然而,遥感影像通常是由不同的传感器从不同的角度捕捉,或者由同一传感器在不同的时间段捕捉,很难找到一种完全通用的方法来处理所有的配准情况。虽然目前著名的商业遥感处理软件如ENVI、ERDAS等集成了多模态遥感自动配准功能,这些软件虽能够对多源遥感影像进行配准处理,但采用的方法依旧是传统的影像匹配方法(如:归一化互相关和互信息),不能适用于多模态遥感影像的快速精确配准。因此,研发一种快速、高精度的多传感器遥感影像配准方法和系统有着较大的业务需求和应用前景。
多模态遥感影像自动配准的工程化应用面临着如下的挑战:
(1)大尺寸:在实际应用中,遥感影像的尺寸通常都很大,远远不仅几百像素,一景影像往往都是几万像素。如后续实验所用的超大尺寸的SAR和光学影像分别为29530×21621像素和30978×30978像素。
(2)辐射差异:影像间存在显著的非线性辐射差异,即同一地区程序出完全不同的灰度信息,即使人眼也很难识别同名点。
(3)几何失真:遥感影像通常覆盖不同的地形,包括山区和平原区域,并且在这些图像之间具有复杂的全局和局部几何失真。
(3)时相差异:遥感影像间通常都存在拍摄时间的差异,少则几个月,多则几年甚至几十年,导致地面发生一些变化。
上述这些挑战,使得异源影像间高精度的配准更加困难。考虑到CFOG算法(详情见Link)在异源影像配准上快速鲁棒的特点,能很好满足实时处理的需要,因此西南交通大学叶沅鑫老师团队基于CFOG算法,在采用C++和QT编程设计了针对多模态影像配准的系统(见图1),能够快速鲁棒的实现大尺寸异源遥感影像的配准,并且通过实验对比证明,该系统在配准精度和计算效率方向全面优于ENVI和ERDAS等遥感商业软件。
该系统对应的CSDN下载链接为Link(内包括可运行的系统及使用说明):
并在百度网盘上提供了一对可供测试的多模态影像,百度云盘链接为:测试多模态影像链接。提取码为:ZBZB
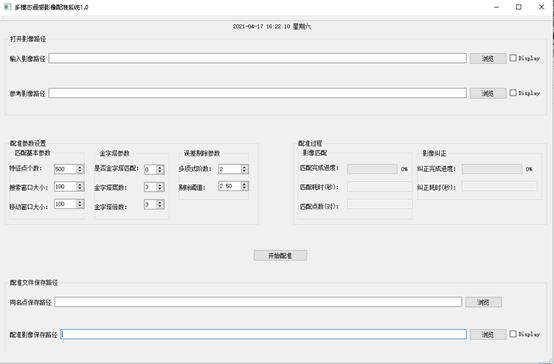
图1-多模态配准系统界面
二、多模态配准系统的技术流程
虑到遥感影像的地理参考信息可以用于预测用于同名点检测的搜索区域,所设计的系统采用分块的策略进行图像匹配,主要包括以下四个步骤:特征点检测,同名点匹配,误差剔除和图像校正。
1、特征点检测
(1)特征点检测:分块的Harris算子被用于在参考影像上提取分布均匀的特征点。首先将影像划分为n×n个不重叠的格网,在每个格网中,我们计算每个像素的Harris值,并选择具有最大Harris值的k个像素点作为特征点。结果可以在参考图像中提取n×n×k个特征点,其中n和k的值由用户决定。
2、同名点匹配
(2)特征点匹配:一旦在参考图像中检测到一组特征点,就基于地理参考信息确定待配准图像中的搜索区域。随后,使用上一节博客介绍的CFOG算法和快速匹配的相似性度量(频率域空间加速匹配)来检测图像之间的同名点。
3、误差剔除
(3)误差剔除:在上述图像匹配中,由于诸如云和阴影之类的一些遮挡,误匹配(即,具有大误差的同名点)是不可避免的。通过以下迭代剔除误差大的点:①使用所有同名点建立几何映射模型;②用最小二乘法计算同名点的残差和均方根误差(RMSE),去除残差最大的同名点;③重复上述过程,直到RMSE小于给定阈值(如:2个像素)。在误差剔除过程中,映射模型(一、二、三次多项式模型)的选择取决于图像之间的几何失真,可以由用户自己选择。
4、图像校正
(4)图像校正:用步骤(3)中经过几何映射模型剔除后的同名点对待配准影像进行纠正。
三、实验结果
我们在实验中使用了一对超过20,000×20,000像素的多模态遥感影像来验证该配准系统的有效性,并与两种流行的商业软件系统(即ENVI 5.0和ERDAS 2013)进行比较。两个软件都具有用于自动遥感图像配准的功能模块:“Image Registration Workflow(ENVI)”和“Auto Sync(ERDAS)”。配准结果对比如下:
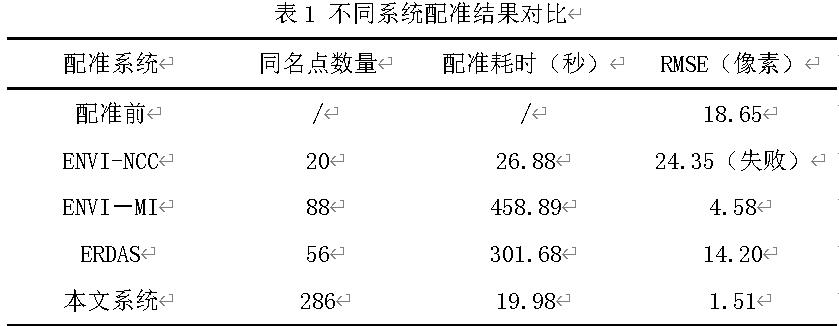
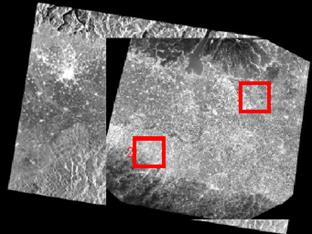
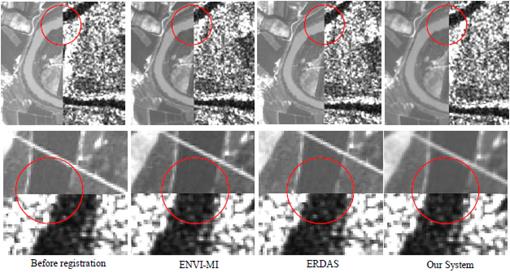
图2 配准前和ERDAS,ENVI-MI和本文系统的配准结果
第1行红色方框表示选取验证配准结果的区域
第2行为框1中的配准结果
第3行为框2中的配准结果
表1展示了三个系统的配准结果,ENVI-NCC失败是因为其配准准确性甚至比配准前更差,而ENVI-MI和ERDAS与配准前相比提高了一些配准精度,但不够理想。而我们的系统不仅实现了更高的配准精度,并且分别比ENVI-MI和ERDAS快20倍和15倍。图2显示了配准前和ERDAS,ENVI-MI和我们系统的配准效果,我们可以清楚地看到我们的系统表现最佳,其次是ENVI-MI和ERDAS。
四、总结
上述实验结果表明,该系统对于大尺寸的多模态图像的配准是有效的,并且在配准精度和计算效率方面全面优于目前国际上的主流商业软件ENVI和ERDAS,这表明所研发的系统具有工程应用的潜力。不过该系统目前只支持经过地理纠正的遥感影像,即影像具有地理坐标,并且两幅影像具有相同的投影参考,后续将提供基于有理多项式参数(RPC)的配准功能。
五、知识产权
该系统已经申请软件著作权和专利,在没有发明者同意的情况下,只能将该系统其用于科学研究,不能将其任何形式的项目或者商业化应用。
以上是关于利用ERDAS对tm遥感影像分类步骤 要详细的 急急急的主要内容,如果未能解决你的问题,请参考以下文章
求用envi软件实现遥感影像的道路特征提取的步骤,急,求大神帮忙!!!
arcmap如何计算出tm遥感影像上的水体面积总和?还有植被面积等等
快速鲁棒的多模态遥感影像配准系统(可下载,支持大尺寸遥感影像),性能超越国际著名遥感商业软件ERDAS和ENVI