玩转X-CTR100 l CAN通信
Posted xtark
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了玩转X-CTR100 l CAN通信相关的知识,希望对你有一定的参考价值。

更多塔克创新资讯欢迎登陆【塔克社区 www.xtark.cn 】【塔克博客 www.cnblogs.com/xtark/ 】
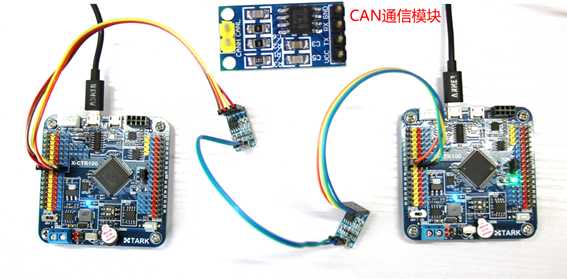
X-CTR100控制器STM32F4处理器内置CAN控制器,实现CAN通信功能,需要外扩CAN接口模块,本例程使用NXP的JTA1050模块。
原理
CAN 是Controller Area Network 的缩写(以下称为CAN),是ISO国际标准化的串行通信协议。在汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。为适应"减少线束的数量"、"通过多个LAN,进行大量数据的高速通信"的需要,1986 年德国电气商博世公司开发出面向汽车的CAN 通信协议。此后,CAN 通过ISO11898 及ISO11519 进行了标准化,在欧洲已是汽车网络的标准协议。
CAN 的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持。关于CAN协议详细介绍,请参考资料文件夹相关文档。
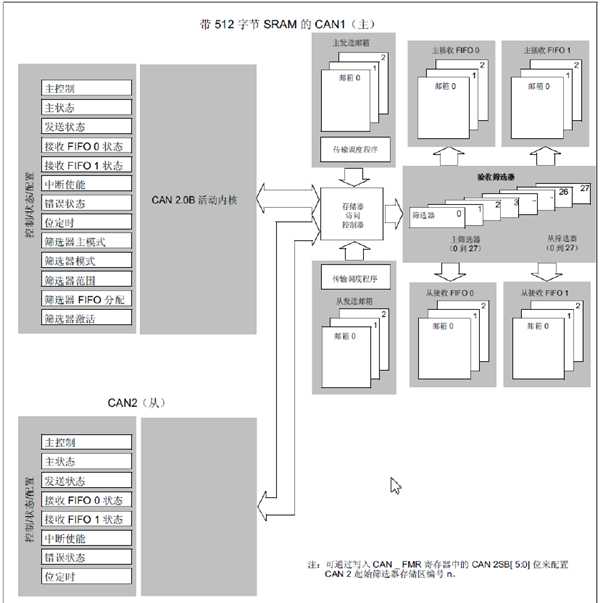
X-CTR100控制器STM32F4处理器内置CAN控制器,支持 CAN 协议 2.0A 和 2.0B,特性如下。
- 支持 CAN 协议 2.0A 和 2.0B 主动模式
- 波特率 最高达 1Mbps 1Mbps
- 支持时间触发通信
- 具有 3个发送邮箱 个发送邮箱
- 具有 3级深度的 级深度的 2个接收 个接收 FIFO
- 可变的过滤器组( 28 个)
STM42F4内部CAN框图。
使用CAN功能,需要增加CAN通信接口芯片,本文使用TJA1050,该芯片兼容PCA82C250。
例程
使用CAN接口模块TJA1050进行CAN通信操作,实现了数据循环发送和数据接收显示功能,可通过2块X-CTR100控制器通信,或者使用1块X-CTR100和CAN分析仪通信,本例程以2套X-CTR100通信为例进行说明。
硬件说明
硬件资源:
- 串口UART1
- LED灯
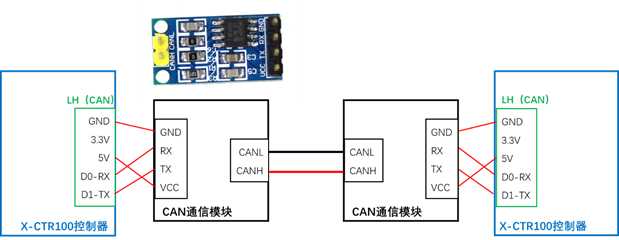
- CAN扩展接口(LH)
- CAN接口模块TJA1050(需自备)
连接关系如图所示
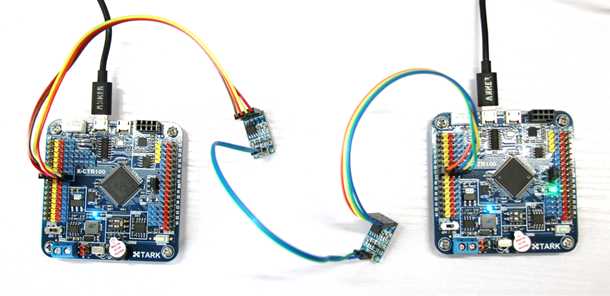
连接实物图
软件说明
X-SOFT软件生态,X-API扩展文件如下。
ax_can.c—— CAN通信源文件
ax_can.h——CAN通信接口头文件
接口函数
void AX_CAN1_Init(uint8_t tsjw,uint8_t tbs2,uint8_t tbs1,uint16_t brp,uint8_t mode); //CAN1初始化 uint8_t AX_CAN1_SendMsg(uint8_t* msg,uint8_t num); //CAN1发送数据 uint8_t AX_CAN1_ReceiveMsg(uint8_t *msg); //CAN1接收数据 |
特殊说明,1.8固件 PLL_N 默认为360,通信时频率错误,之前固件版本为336,改为336后,通信正常。
修改位置为,system_stm32f4xx.c,400行位置。
#if defined (STM32F40_41xxx) #define PLL_N 336 //360 /* SYSCLK = PLL_VCO / PLL_P */ #define PLL_P 2 #endif /* STM32F40_41xxx */ |
例程代码主要包括两部分,主程序负责数据定时发送,CAN接收中断负责数据接收和显示。
CAN1接收中断程序代码如下。
//中断服务函数 void CAN1_RX0_IRQHandler(void) { CanRxMsg RxMessage; uint8_t i=0;
CAN_Receive(CAN1, 0, &RxMessage);
printf("RX:");
for(i=0;i<8;i++) printf("%d ",RxMessage.Data[i]);
printf(" ");
} |
主程序代码如下。
int main(void) { u8 i=0; u8 canbuf[8]; u8 res;
//XRT1初始化 AX_Init(115200); printf("***X-CTR100 CAN通信例程*** ");
//CAN初始化,正常模式,波特率500Kbps AX_CAN1_Init(CAN_SJW_1tq,CAN_BS2_6tq,CAN_BS1_7tq,6,CAN_Mode_Normal);
//设置CAN接收中断 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2 NVIC_Config();
//初始化发送数据 for(i=0;i<8;i++) { canbuf[i] = 0; //填充发送缓冲区 }
while (1) { canbuf[0]++;
res=AX_CAN1_SendMsg(canbuf,8);//发送8个字节
AX_Delayms(100); AX_LEDG_Toggle(); } } |
为了显示每帧数据差异,发送的第一个字节进行加1操作。
实现效果
两个X0CTR100控制器互相发送接收,打开串口助手即可查看接收的数据。
以上是关于玩转X-CTR100 l CAN通信的主要内容,如果未能解决你的问题,请参考以下文章