玩转X-CTR100 | X-PrintfScope波形显示
Posted xtark
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了玩转X-CTR100 | X-PrintfScope波形显示相关的知识,希望对你有一定的参考价值。

更多塔克创新资讯欢迎登陆【塔克社区 www.xtark.cn 】【塔克博客 www.cnblogs.com/xtark/ 】
X-CTR100控制器配套的X-PrintfScope串口波形显示功能的使用,如其名,软件最大亮点是可以通过C语言Printf函数实现波形显示功能,使用简单灵活。另外也支持常规的串口通信协议,实现高效率传输。
原理介绍
X-CTR100控制器配套X-PrintfScope串口波形显示软件,具有八个显示通道,最大特点是可通过C标准库函数printf增加@标识实现数据波形显示,例如printf("@%d %f ",a,b)可实现一个整形一个浮点类型数据波形显示,使用方便灵活。Printf协议使用字符编码方式,虽然使用方便灵活,但传输效率相对较低,本软件也支持高效的Data协议传输方式。
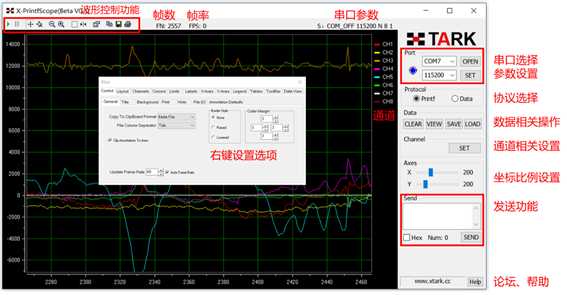
X-PrintfScope基于功能强大的Iocomp控件设计,软件界面及功能介绍如下图所示,详细使用请参考软件帮助或软件使用说明文档,本教程对软件基本操作进行说明。
串口设置
- 软件启动后,会自动搜索可用的串口,并在端口号下拉框处显示可用串口。如果有可用串口单击"OPEN"按钮即可打开对应串口,并且显示串口状态和参数信息(S:COM3_ON 115200 N 8 1),串口参数为默认参数(波特率:115200,校验位:NONE,数据位:8,停止位1)。
- 多个可用串口时,端口号下拉框可选择和切换不同串口。
- 波特率下拉框可以选择不同波特率。
- SET按钮可以打开不常用的‘校验位‘‘数据位‘‘停止位‘串口参数设置对话框。
- 进入串口参数设置对话框可进行参数设置,完成后单击参数更新即可完成参数设置。考虑到常用情况,参数设置不具有记忆性,每次进入均显示常用的默认参数值。
- 不支持串口热插拔,热插拔会报错误,建议关闭串口后再进行串口插拔。
波形显示
- 具有八个波形显示通道,使用不同颜色表示
- 波形可以拖动、放大、缩小操作
- 示波器上方具有帧数和帧率显示
- 建议最大发送帧率为120,帧率与电脑显示性能有关,帧率过大容易导致波形显示延迟
- CLEAR按钮实现波形和数据清除
- VIEW按钮实现数据显示(待实现)
- SAVE按钮实现数据保存为txt格式文件,文件名默认为"xx月xx日xx时xx分xx秒_.txt",其中xx为当前时间,"_"后可增加内容字符描述。
- LOAD按钮可实现保存数据的波形显示(待实现)
- Axes栏X、Y滑动条可进行X轴和Y轴数据缩放操作
通道操作
- Channel栏SET按钮可实现波形通道相关操作,单击可进入通道设置对话框
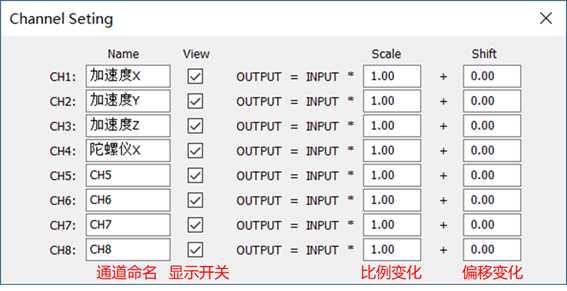
- 通道设置对话框 Name栏可定义波形通道名称
- View复选框可控制该通道波形是否显示
- Scale栏为输出与输入的比例系数
- Shift栏为输出与输入的唯一系数
- Scale和Shift可以方便进行波形显示范围的控制,方便进行不同数量级波形同屏显示
Printf通信协议
- Printf协议:通过C语言Printf函数增加@标识实现数据波形显示。
- 显示示例函数:printf("@%d %d %f %f ", a, b, x, y);,实际发送数据 @876 142 12.35 48.357
- @为帧头标识符,回车换行 为帧尾标识符。
- @帧头后面紧跟数据。
- 每个数据后面加一个空格,作为数据标识符。
- 支持整型%d和浮点%f两种数据类型。
- 数据数量为1~8,几个数据对应几个显示通道
Data通信协议
- Data协议为高效率的数据编码协议,传输效率比Printf协议高。
- 协议内容:0xAA + 0x55 + 数据个数 + 预留位 + 数据1低8位 + 数据1高8位 + …… + 校验和。
- 数据个数:根据需要可以选择1~8,对应数据1~数据8。
- 预留位:0x00
- 数据内容:数据位为16进制整型数据,低8位在前,高8位在后。数据数量与前面数据个数位对应。
- 校验和:前面数据累加和的低8位。
- 范例:帧数据‘aa 55 03 00 43 fe 2a ff 74 ff df‘
发送功能
- 为方便系统调试,设计了数据发送功能,可实现下位机命令交互功能。
- 可以在Send区,发送您发送的任意字符。
- 支持16进制发送,勾选‘Hex‘复选框后,发送的时候将对发送区的内容进行16进制和字符互转。
- Num为发送的字节数。
例程-Printf协议例程
使用MPU6050作为数据源,使用C语言Printf函数实现对MPU6050传感器3轴加速度、3轴陀螺仪、温度数据7个数据源进行波形显示,其中加速度陀螺仪为整型数据,温度为浮点数据。
硬件说明
硬件资源:
- 串口UART1
- LED灯
- MPU6050运动传感器
软件说明
通过MPU6050相关X-API接口进行数据采集,并将采集的数据通过printf函数输出,主程序代码如下。
int main(void) { float tmp; int16_t acel[3]; int16_t gyro[3];
//XRT1初始化 AX_Init(115200);
//模块初始化及配置 AX_MPU6050_Init(); //MPU6050初始化 AX_MPU6050_SetAccRange(AX_ACC_RANGE_2G); //设置加速度量程 AX_MPU6050_SetGyroRange(AX_GYRO_RANGE_250); //设置陀螺仪量程 AX_MPU6050_SetGyroSmplRate(200); //设置陀螺仪采样率 AX_MPU6050_SetDLPF(AX_DLPF_ACC94_GYRO98); //设置低通滤波器带宽
while (1) { AX_MPU6050_GetAccData(acel); //读取三轴加速度数据 AX_MPU6050_GetGyroData(gyro); //读取三轴陀螺仪数据 tmp = AX_MPU6050_GetTempValue(); //读取温度传感器数据
printf("@%d %d %d %d %d %d %f ",acel[0],acel[1],acel[2],gyro[0],gyro[1],gyro[2],tmp);
AX_Delayms(7); AX_LEDG_Toggle(); } } |
实现效果
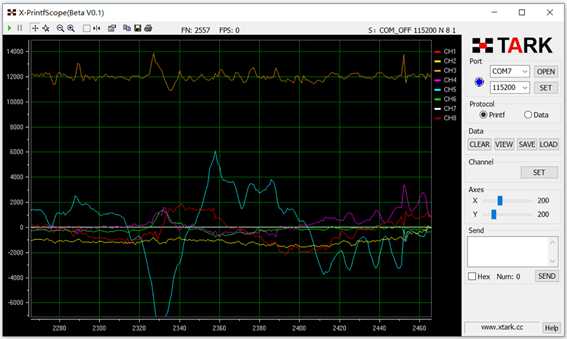
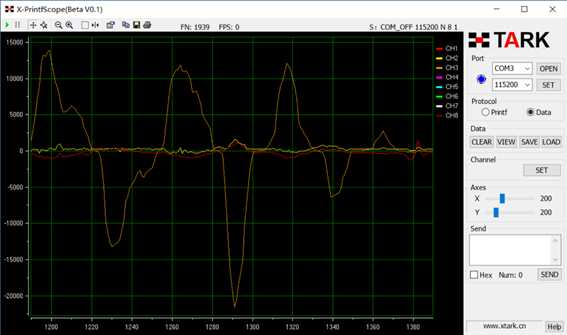
波形显示效果如下图所示,软件会自动对数据进行跟踪显示,本例程帧率可以达到90,方便观察数据可以拖动窗口到全屏显示。
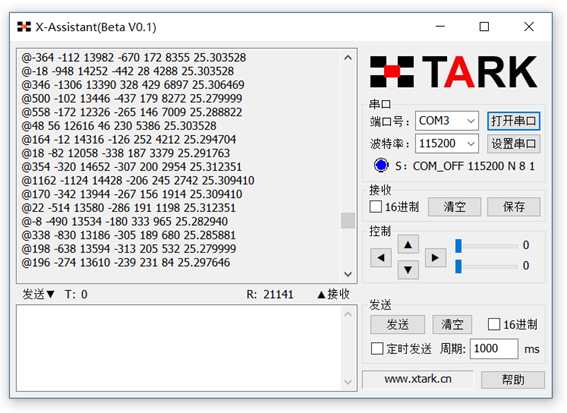
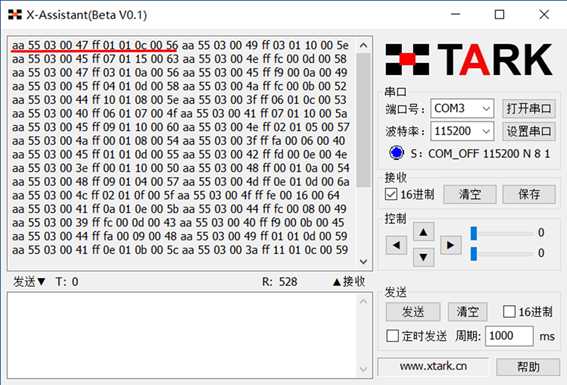
使用串口助手查看数据内容,如下图所示。
为了方便数据波形展示,可对每个通道数据进行设置,包括通道命名、显示开关、数据比例和偏移变化等,通道设置界面如下图所示。
例程-Data协议例程
Data协议即为普通串口数据帧通信协议,使用MPU6050作为数据源,采集3轴陀螺仪数据,通过X-API函数AX_PrintfScope_SendData()进行波形显示。
硬件说明
硬件资源:
- 串口UART1
- LED灯
- MPU6050运动传感器
软件说明
X-SOFT软件生态,X-API扩展文件如下。
ax_printfscope.c—— Data协议源文件
ax_printfscope.h——Data协议操作接口头文件
Data协议实现部分封装到了ax_printfscope.c文件中,默认使用UART1,无须初始化硬件,具有一个发送数据函数接口,实现源码如下。
/** * @简 述 X-PrintfScope软件 Data协议发送函数 * @参 数 *pbuf:发送数据指针,int16_t 16位整型数据 * num:发送数据个数,<8 * @返回值 */ void AX_PrintfScope_SendData(int16_t *pbuf,uint8_t num) { u8 i; u8 tx_buf[20]; //接收缓冲 u8 tx_checksum = 0;//发送校验和
if((num < 9) && (num > 0)) { /******获取数据******/ tx_buf[0] = 0xAA; //帧头 tx_buf[1] = 0x55; // tx_buf[2] = num; //数据长度 tx_buf[3] = 0x00; //预留
for(i=0; i<num; i++) { tx_buf[4+(i*2)] = (u8)( (*(pbuf+i)) & 0x00ff ); tx_buf[5+(i*2)] = (u8)( (*(pbuf+i)) >> 8 ); }
/******发送数据******/ for(i=0; i<(4+num*2); i++) { tx_checksum = tx_checksum + tx_buf[i]; USART_SendData(USART1, tx_buf[i]); while(USART_GetFlagStatus(USART1,USART_FLAG_TC) != SET); }
//发送校验和补码 USART_SendData(USART1, (uint8_t)tx_checksum); while(USART_GetFlagStatus(USART1,USART_FLAG_TC) != SET); } } |
软件通过MPU6050相关X-API接口进行数据采集,并将采集的数据通过AX_PrintfScope_SendData()函数输出数据,进行波形显示,主程序代码如下。
int main(void) { int16_t gyro[3]; int16_t buf[3];
//XRT1初始化 AX_Init(115200); printf("***X-PrintfScope软件 Data协议 波形显示例程*** ");
//模块初始化及配置 AX_MPU6050_Init(); //MPU6050初始化 AX_MPU6050_SetAccRange(AX_ACC_RANGE_2G); //设置加速度量程 AX_MPU6050_SetGyroRange(AX_GYRO_RANGE_250); //设置陀螺仪量程 AX_MPU6050_SetGyroSmplRate(200); //设置陀螺仪采样率 AX_MPU6050_SetDLPF(AX_DLPF_ACC94_GYRO98); //设置低通滤波器带宽
while (1) { //获取数据 AX_MPU6050_GetGyroData(gyro); //读取三轴陀螺仪数据
//封装并发送数据 buf[0] = gyro[0]; buf[1] = gyro[1]; buf[2] = gyro[2]; AX_PrintfScope_SendData(buf,3);
AX_Delayms(5); AX_LEDG_Toggle(); } } |
实现效果
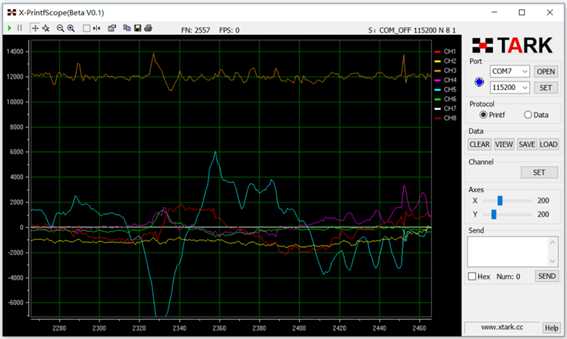
波形显示效果如下图所示,软件会自动对数据进行跟踪显示,本例程帧率可以达到170。
注意,拖动窗口查看波形时自动跟踪显示会停止,再次开启波形跟踪显示请单击绿色三角按钮。
使用串口助手查看数据内容,如下图所示。
以上是关于玩转X-CTR100 | X-PrintfScope波形显示的主要内容,如果未能解决你的问题,请参考以下文章