M100 运行sifit slam
Posted kekeoutlook
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了M100 运行sifit slam相关的知识,希望对你有一定的参考价值。
M100 运行slam
1 M100+X3摄像头+采集卡-电脑
1运行ROS
roscore
2运行ROS_USB_cam发布图像话题
usb_cam siftsalm
3打开X3对应的SLAM
- 打开SLAM/slam_ws/src/sift_slam/launch/ X3.launch
roslaunch sift_slam x3.launch
二 虚拟界面Airsim-电脑控制端
1 连接网线在同一个局域网 一台笔记本当控制端 一台服务器运行Airsim
服务器把图像数据经过局域网给笔记本,笔记本SLAM建图
笔记本通过局域网发送控制消息

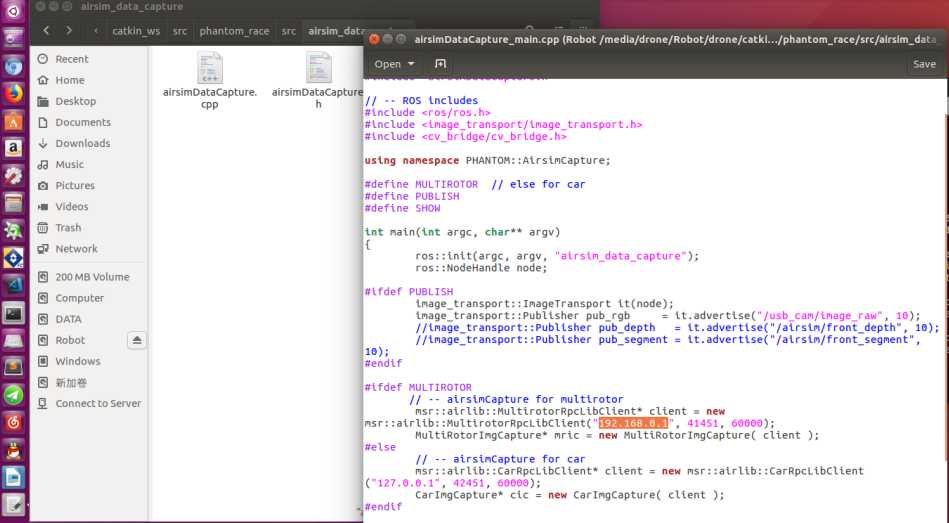
2 修改局域网下服务器的IP地址,使得笔记本控制端可以找到
3 运行ROS
roscore
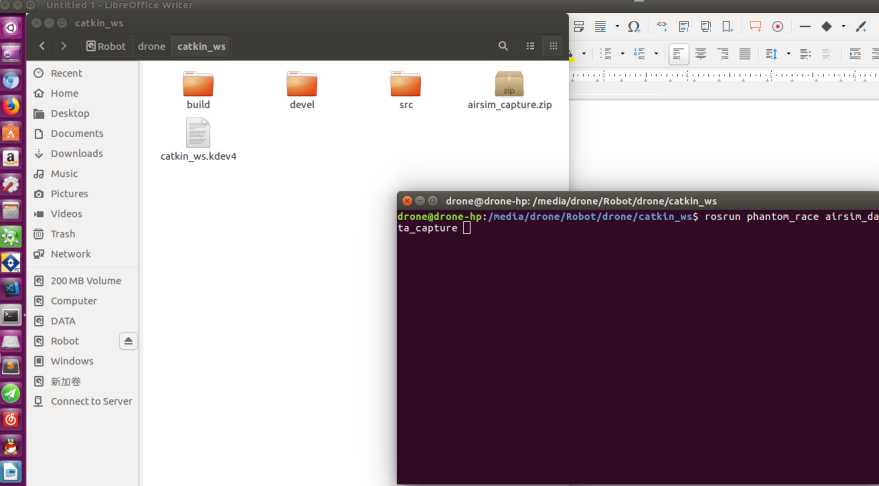
4 运行Airsim节点,开始通信,笔记本获取图像,并发送控制消息
rosrun phantom_race airsim_data_capture
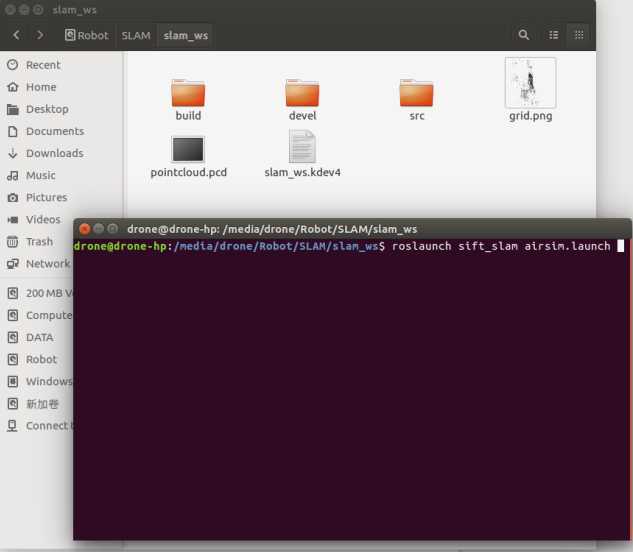
5 笔记本有了图像,开启建图节点 sifit——slam
roslaunch sift_slam airsim.launch
以上是关于M100 运行sifit slam的主要内容,如果未能解决你的问题,请参考以下文章