lidar3D目标检测PointPillars:论文解读代码解读部署实现
Posted 踟蹰横渡口,彳亍上滩舟。
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了lidar3D目标检测PointPillars:论文解读代码解读部署实现相关的知识,希望对你有一定的参考价值。
Abstract
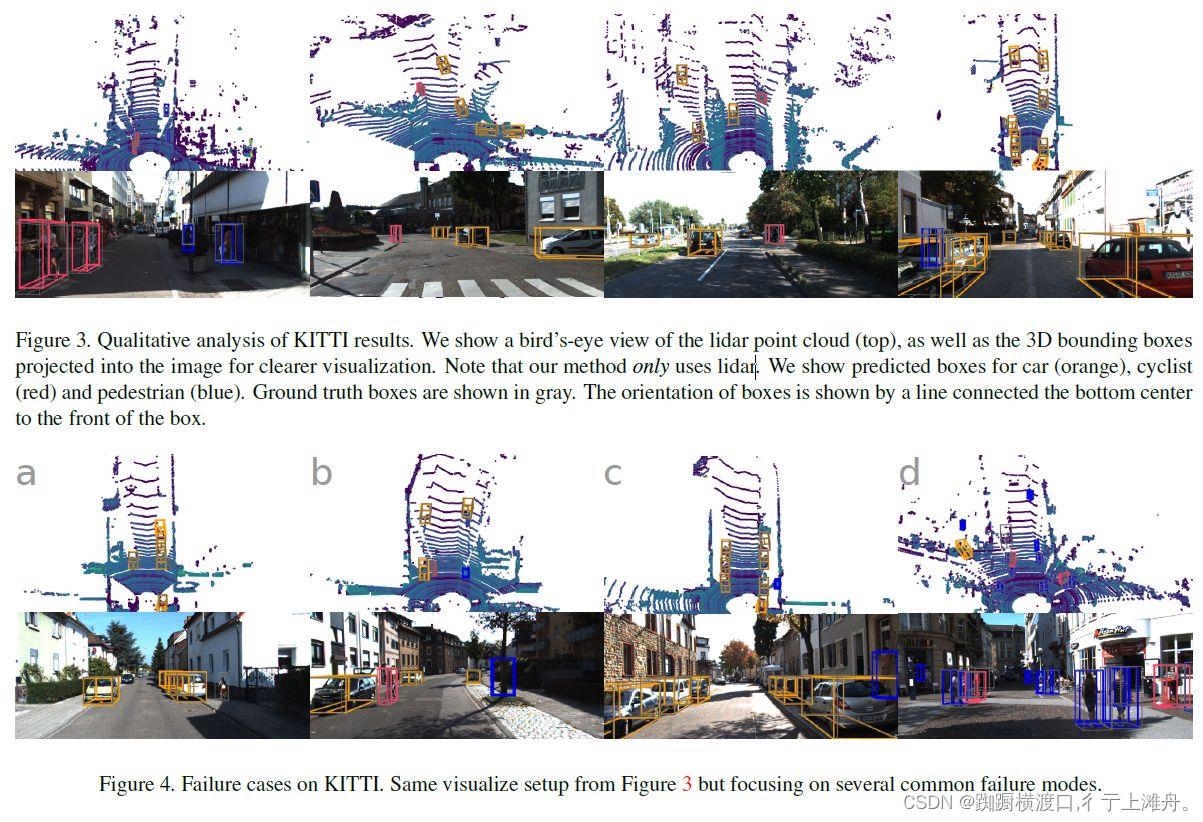
点云中的目标检测是自动驾驶等机器人应用中的一个重要方面。在本文中,作者思考了将点云编码成适合下游检测pipeline的格式问题。最近的文献提出了两种类型的编码器:固定编码器往往更快,但牺牲了准确性,而从数据学习的编码器更准确但是速度较慢。在这篇工作中,作者提出了一种可以利用PointNet去学习以垂直列组织的点云的表示(pillars)的新的encoder。这种编码特征可以用于任何标准的2D卷积检测体系结构,接着作者进一步提出了一个精简的下游网络。大量的实验表明,PointPillars在速度和准确性方面都大大优于以前的编码器,尽管只使用激光雷达,这种检测pipeline显著优于目前的先进水平。
Motivation
在城市环境中部署自动驾驶汽车(autonomous vehicles, AVs)是一项艰巨的技术挑战。除其他任务外,自动驾驶汽车还需要实时检测和跟踪车辆、行人和自行车等移动物体,为了达成这个目标,自动驾驶汽车依赖多个传感器,其中激光雷达可以说是最重要的,激光雷达使用激光扫描仪测量到环境的距离,从而生成稀疏点云。传统上,激光雷达机器人pipeline将这些点云解释为目标检测,通过一个自下而上的pipeline&#
以上是关于lidar3D目标检测PointPillars:论文解读代码解读部署实现的主要内容,如果未能解决你的问题,请参考以下文章