计算机视觉|投影与三维视觉
Posted 程序媛一枚~
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了计算机视觉|投影与三维视觉相关的知识,希望对你有一定的参考价值。
这一篇将学习投影与三维视觉,沿用上一篇 计算机视觉|针孔成像,相机内外参及相机标定,矫正的重要性 摄像机内参数矩阵M、畸变参数、旋转矩阵R、平移向量T以及但影响矩阵H。回顾放射和投影变换,并使用POSIT算法从一幅图像中查找获得已知三维物体的三位姿态(位置和旋转角度)。
1. 三维重建俩种方法
没有可靠的方法可以做到不依赖多幅图像就可以进行标定或提取3D信息。利用多幅图像重建三维场景的最常见情形就是立体视觉。 同时在不同位置上拍摄俩幅图像或者更多,然后对图像中的相应特征进行匹配,分析其中的差异,从而获得深度信息。
另一种情形是从运动中得到结构。 只用一个相机但要在不同时间从不同的地方拍摄多幅图像。
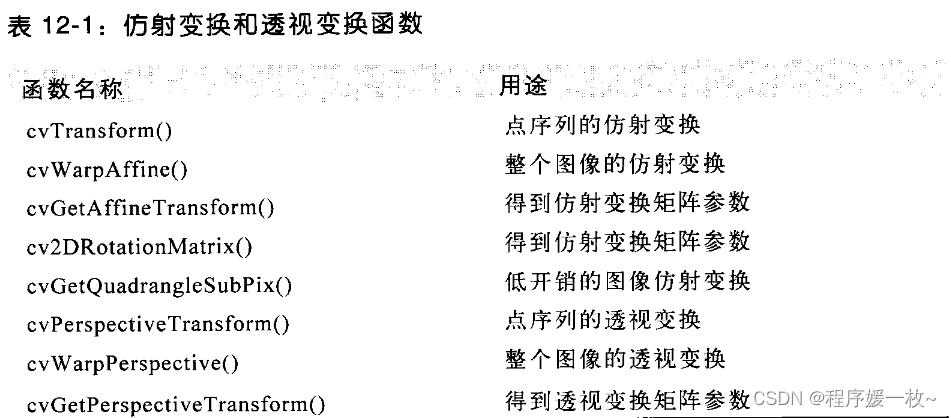
2. 仿射变换和投影变换
仿射变换和透视变换(perspective transformation)把图像上的点从一个位置映射到另一个位置,通常还伴随着亚像素的插值。
仿射变换可以将矩形映射为任意平行四边形,透视变换将矩形映射为任意四边形。
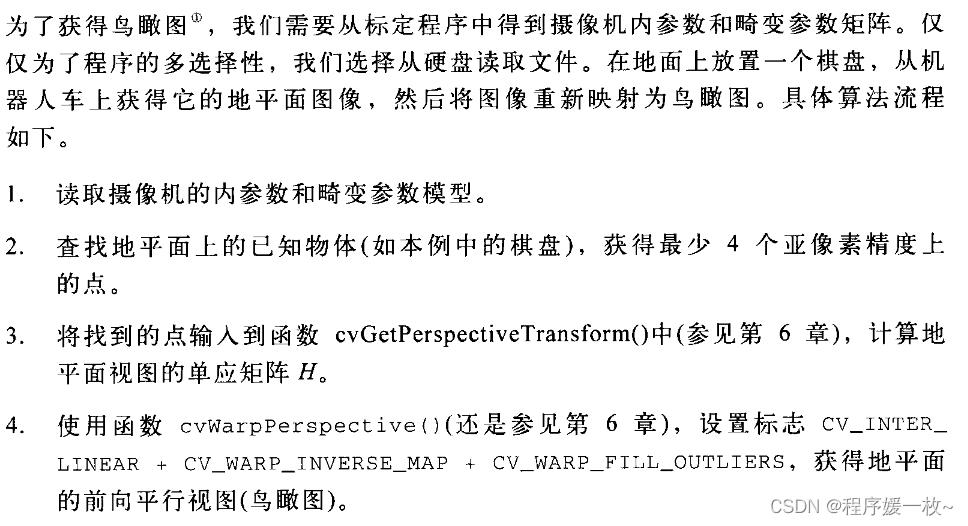
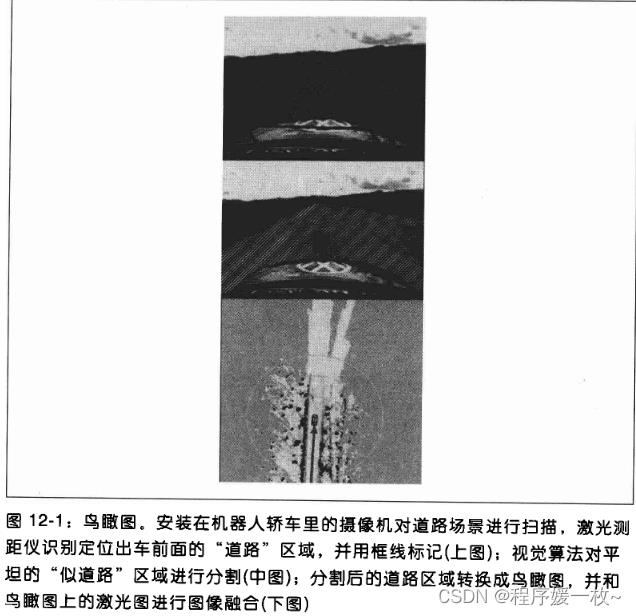
一个经典的应用是鸟瞰图;
透视投影是使用中心投影法,沿着一系列最终汇聚到一个被称为投影中心(center of projection)的点的投影线,将三维物理世界中的点投影变换到二维图像平面中。
投影变换是一种特定的单应性变换,是将同一个三维物体分别投影到俩个不同投影平面下的俩幅图像联系起来(因此,针对的是与三维物体相交的平面,具有不同投影中心的非退化配置)。
3. 3D姿态估计
POSIT(Pose from Orthography and Scaling with Iteration)迭代POS算法,1992年首次提出的用于计算3D物体的姿态的一种算法(位置T和方向R由6个参数秒描述)。
必须找到物体表面的4个非共面点在相应二维图像上的位置,由正交投影和尺寸变换提取姿态(POS)。
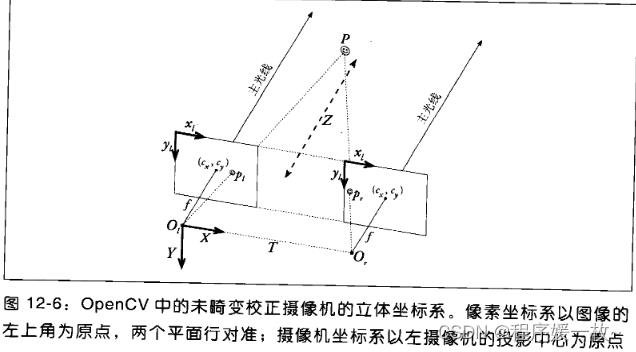
4. 立体成像(stereo imaging)
立体视觉系统仅仅对于物体和摄像机相距较近时具有较高的深度精度。
立体成像的基本几何学是对级几何。对级几何就是将俩个针孔模型和一些新的被称为极点(epipole)的感兴趣点结合起来。
以上是关于计算机视觉|投影与三维视觉的主要内容,如果未能解决你的问题,请参考以下文章