凸优化中的Bregman迭代算法
Posted 山上有只羊M
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了凸优化中的Bregman迭代算法相关的知识,希望对你有一定的参考价值。
http://blog.csdn.net/celerychen2009/article/details/9058315
对于搞图像处理的人而言,不懂变分法,基本上,就没法读懂图像处理的一些经典文献。当然,这已经是10年之前的事情了。
现在,如果不懂得Bregman迭代算法,也就没法读懂最近几年以来发表的图像处理的前沿论文了。国内的参考文献,基本上都是直接引用Bregman迭代算法本身,而对于其原理基本上找不到较为详细的论述。本文简要叙述当前流行的Bregman迭代算法的一些原理。
1、简介
近年来,由于压缩感知的引入,L1正则化优化问题引起人们广泛的关注。压缩感知,允许通过少量的数据就可以重建图像信号。L1正则化问题是凸优化中的经典课题,用传统的方法难以求解。我们先从经典的图像复原问题引入:
在图像复原中,一种通用的模型可以描述如下:
 e.q.(1)
e.q.(1)
f:观测到的图像(m维向量)
u:未知的真实图像(n维向量)
A:线性算子,例如反卷积问题中的卷积算子,压缩感知中则是子采样测量算子。
 :噪声,通常是高斯加性白噪声。方差为:sigma^2。
:噪声,通常是高斯加性白噪声。方差为:sigma^2。
目标:由f得到u。
在式(1)中,我们仅知道观察到的图像f,其他的一概不知。因此这种问题是病态的,我们可以通过正则化把它变成良态的。
正则化方法:
假定对未知的参数 μ 引入一个先验的假设,例如稀疏性,平滑性。正则化问题的常见方法Tikhonov方法,它通过求解下面的优化问题:
其中 μ 是一个大于零的标量,事先设定的常数,用于权衡观测图像f和正则项之间的平衡。双绝对值符号是L2范数。L2条件约束。
下面,为了引入Bregman迭代算法,需要对两个重要的概念进行描述(次梯度和Bregman距离)。
2、Bregman距离
这里先复习一下梯度和导数的概念:
导数:lim(△x->0) ( f(x+△x) - f(x) ) / △x
方向导数:lim( dis(P0,P1) ->0) ( f(P1) - f(P0) ) / dis(P0,P1)。。上面讲的导数就是沿着 x 轴 方向的方向导数。
!!导数是 f(x) 在某个方向的变化率,是一个值,标量。梯度:沿方向导数最大值的方向,大小为该方向导数的值。
!!梯度是一个向量。
次梯度
subgradient(次梯度,又称子梯度、弱梯度等),
泛函 J 在 u 点的次梯度定义如下:

J: X->R, 凸函数。
u:作用域X中的一点。
v:作用域 X 中的任一点。
p:X 的对偶空间 X* 的中的某一点。
 : 是内积运算。如果泛函 J 是简单的一元函数,则就是两个实数相乘。
: 是内积运算。如果泛函 J 是简单的一元函数,则就是两个实数相乘。
J 在 u 点的所有次梯度的集合成为 J 在 u 点的次微分,记为 。
。
次梯度有什么好处呢?
对于一般的导数定义,例如 y=|x| 在0点是不可导的,但是对于次梯度,它是存在的。
Bregman距离
点u和v之间的Bregman距离定义如下:

J:X->R, 凸函数。
 。。所以 p 是 J 在 u 点的一个次梯度。
。。所以 p 是 J 在 u 点的一个次梯度。
凸函数两个点u,v之间的Bregman距离:等于其函数值之差,再减去其次梯度点p与自变量之差的内积。
注意:这个距离不满足对称性,这和一般的泛函分析中距离定义是不一样的。
!!Bregman 距离有一些十分良好的性质,使得他在解决 L1 正则化问题时十分有效。
3、Bregman迭代算法
要解决的问题:求u(最小化)
Bregman迭代算法可以高效的求解下面的泛函的最小值问题。

J:X->R, 凸函数,非负。u∈X。
H:X->R, 凸函数,非负。u∈X,f 是已知常数(通常是一个观察得到的图像数据,是矩阵或向量)。
X:作用域,是凸集也是闭集。
注意:上述泛函会根据具体问题的不同具有不同的具体表达式。例如,对于简介中的图像复原问题, J(u) 是平滑先验约束,是正则化项;而H则是数据项。
Bregman迭代算法
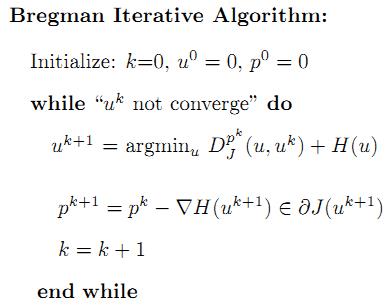
首先,初始化相关的参数为零;
然后,再迭代公式u。。直到 uk 满足收敛条件。
u,左边一项是泛函 J 的Bregman距离。
p,右边一项是泛函 H 的梯度(???or次梯度???)。
可以看出:
· 第一次迭代,
u1=argmin(u) D(u, 0) + H(u) , 其中D(u, 0)=J(u) - J(0) - <0, u>=J(u)
· 再经过多次的迭代,
就能够收敛到真实的最优解。
对于具体的问题:
定义的具体形式是不同的。
例如对于压缩感知使用的基追踪算法,J是L1范数;
而对于图像去噪问题,可能就是u的梯度L1范数,同时A也变成了恒等算子了。
4、线性Bregman迭代算法
Bregman算法对于基追踪问题来说是一种很好的工具。但是,算法中的每一步都要求解公式 的最小值,从而使得计算复杂度非常高。
的最小值,从而使得计算复杂度非常高。
因此提出了——
线性Bregman迭代算法推导
首先,利用矩阵的泰勒公式,将公式
中的 H(u) 线性展开,得到:

但是这种近似展开只有在u和uk十分接近的时候上式才准确。因此,把泰勒公式中的二次项 加上,则原来的问题就变成了:
加上,则原来的问题就变成了:

可以看到,二次项可以使 u 和 uk 很靠近。
为什么这里的二次项是L2范数的平方?
答:因为向量的平方就是L2范数的平方。。
???二阶导数不见了????
又因为:

注意  和
和  是关于 u 的常数。
是关于 u 的常数。
所以,

考虑基追踪算法,令 H(u) =
得到:



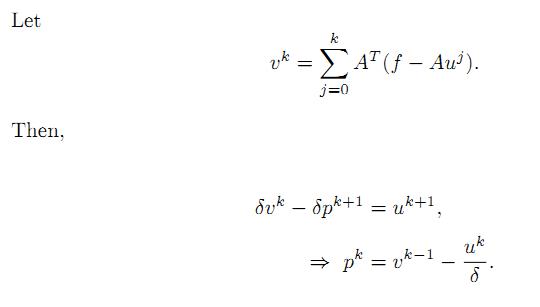
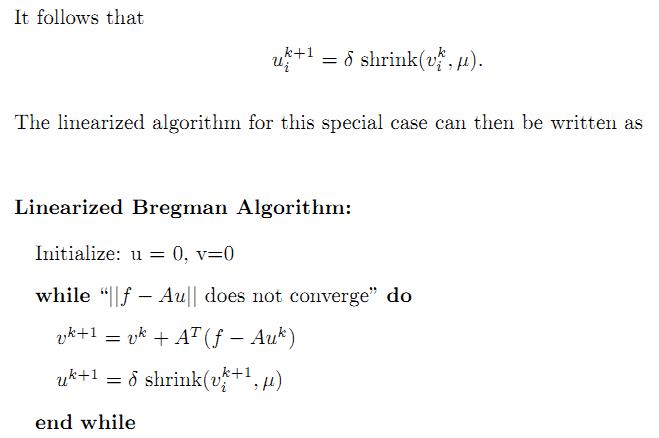
考虑该式的一个特殊情况, 。并将pk回代,得到:
。并将pk回代,得到:
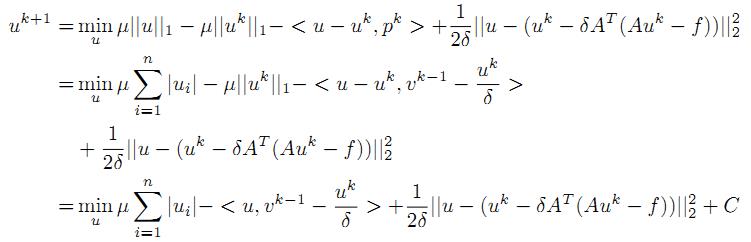
C是一个常量,与uk有关的常量。uk也是一个常量。
分3种情况来考虑 u,则
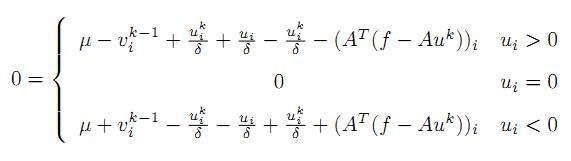
进一步整理,得到:
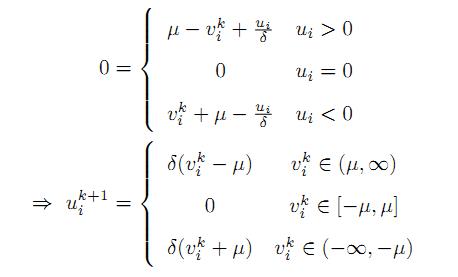
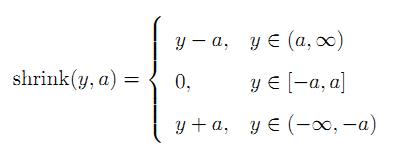
定义shrink算子,当a>0时,有:
线性Bregman算法总结
5、Split Bregman 迭代算法
参考书:《Bregman算法》http://download.csdn.net/detail/celerychen2009/5552551
以上是关于凸优化中的Bregman迭代算法的主要内容,如果未能解决你的问题,请参考以下文章