动作捕捉,系数转换,IK 等整理总结
Posted 长虹剑
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了动作捕捉,系数转换,IK 等整理总结相关的知识,希望对你有一定的参考价值。
bvh 数据格式介绍
bvh 内部没给坐标系,应该就是按照 opengl 的坐标系
bvh 如果写的旋转是 X Y Z ,那么就是先按照Z旋转,然后再按照Y,最后X, 这部分的看出是按照这个代码来的, 当然也可一把代码理解为大写的XYZ是内旋转,按照写的顺序摆放旋转矩阵。
https://www.cxyzjd.com/article/o87481299/7690954
enum ZYX = 1, YZX = 2, ZXY = 3, XZY = 5, YXZ = 6, XYZ = 7;
unsigned char BVH::getFlags()
return (unsigned char)((*p - 'X' + 1)*1 + (*(p+10) - 'X' + 1)*2 + (*(p+20) - 'X' + 1)*4 - 10);
//绘制函数的核心 递归的绘制
void BVH::drawRecursive(BVHJoint* r)
glPushMatrix();
//要先平移后旋转(被debug3)
//平移 根据父节点空间
glTranslatef(r->x,r->y,r->z);
//根据motion中的信息和节点的通道类型进行旋转
roateSpace(r->flags);
//画出点
glutSolidSphere(1.0f,20,16);
//递归绘制子节点
for(int i = 0; i < r->childNum; i++)
drawRecursive(r->getChild(i));
glPopMatrix();
void BVH::roateSpace(unsigned char flags)
//enum ZYX = 1, YZX = 2,ZXY = 3,XZY = 5,YXZ = 6,XYZ = 7;
switch (flags)
case ZYX: // 1 = 11 - 10, 11 = 3*1 + 2*2 + 1*4 ==> 'ZYX'
glRotatef(pFrame[0],0.0f,0.0f,1.0f);
glRotatef(pFrame[1],0.0f,1.0f,0.0f);
glRotatef(pFrame[2],1.0f,0.0f,0.0f);
break;
case XYZ: // ==> 'XYZ'
glRotatef(pFrame[0],1.0f,0.0f,0.0f);
glRotatef(pFrame[1],0.0f,1.0f,0.0f);
glRotatef(pFrame[2],0.0f,0.0f,1.0f);
break;
// omit
反向动力学(IK)的一些资料
给定3D/2D顶点如何求出骨骼旋转系数
方法一:
深度学习的方法,训练一个3D点到旋转系数的网络
方法二:
最优化的方法,不过最优化需要有初始值,最好能有个网路可以给出初始值,这样优化快一点。关于这一点可以看一个网络 IKNET
最优化其实也有几种思路,一般最优化的条件都是重建项+先验项(这里主要防止解出不合适的骨骼结构,可以加混合高斯先验项)
1)可以使用梯度下降 smplify-x ,这个SPIN
2)可以数值求解雅克比,例子在 Minimal-IK
3)C++ 雅克比解析求解,可以用 MonocularTotalCapture
具体在这里
bool AdamFullCost::Evaluate(double const* const* parameters,
double* residuals,
double** jacobians) const
常规的解法
CCD: 就是给定目标点的位置,并且确定好影响的骨骼数目,则依次让旋转靠近目标点即可
基于优化的方法: 拆成 欧拉角,并且再拆成三个角度分别求
逆雅可比矩阵: 主要是希望雅可比矩阵不用变,求解的快
关于 CCD
主要是考虑让末端点对齐到目标上,这里解释一段code,来自 逆运动学IK
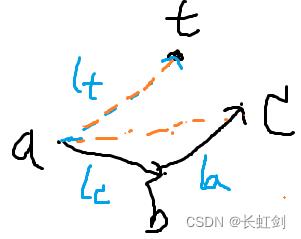
a b c 是链式骨骼,t 是给定目标点,让c 靠近, 后面一点有点看不懂
void two_joint(
glm::vec3 a, glm::vec3 b,
glm::vec3 c, glm::vec3 t, float eps,
glm::mat4& a_pR, glm::mat4& b_pR,
glm::mat4& a_gR, glm::mat4& b_gR,
glm::mat4& a_lR, glm::mat4& b_lR)
float lc = glm::length(b - a);
float la = glm::length(b - c);
float lt = glm::clamp(glm::length(t - a), eps, lc + la - eps);
if (glm::length(c - t) < eps) return;
// 上面就是求长度,注意是长度并不是向量,接着利用余弦公式,求一些夹角的值
float ac_ab_0 = acosf(glm::clamp(glm::dot(glm::normalize(c - a), glm::normalize(b - a)), -1.0f, 1.0f));
float ba_bc_0 = acosf(glm::clamp(glm::dot(glm::normalize(a - b), glm::normalize(c - b)), -1.0f, 1.0f));
float ac_at_0 = acosf(glm::clamp(glm::dot(glm::normalize(c - a), glm::normalize(t - a)), -1.0f, 1.0f));
// 这里利用的是三角形余弦公式,注意,这里第一个是假设 t 与 c 已经重合,这样夹角 cab 与 abc 必然会改变,这里就是算出最终的角度是多少
float ac_ab_1 = acosf(glm::clamp((la*la - lc*lc - lt*lt) / (-2*lc*lt), -1.0f, 1.0f));
float ba_bc_1 = acosf(glm::clamp((lt*lt - lc*lc - la*la) / (-2*lc*la), -1.0f, 1.0f));
// 这里主要是构造一个旋转轴,因为要在平面按这个法向量旋转,
glm::vec3 a0 = glm::normalize(glm::cross(b - a, c - a));
glm::vec3 a1 = glm::normalize(glm::cross(t - a, c - a));
glm::mat3 r0 = glm::mat3(glm::rotate(ac_ab_1 - ac_ab_0, -a0));
glm::mat3 r1 = glm::mat3(glm::rotate(ba_bc_1 - ba_bc_0, -a0));
glm::mat3 r2 = glm::mat3(glm::rotate(ac_at_0, -a1));
glm::mat3 a_lRR = glm::inverse(glm::mat3(a_pR)) * (r2 * r0 * glm::mat3(a_gR));
glm::mat3 b_lRR = glm::inverse(glm::mat3(b_pR)) * (r1 * glm::mat3(b_gR));
for (int x = 0; x < 3; x++)
for (int y = 0; y < 3; y++)
a_lR[x][y] = a_lRR[x][y];
b_lR[x][y] = b_lRR[x][y];
还有一个是 https://its401.com/article/jiangcaiyang123/14047265
这个只写了一个骨骼的情况,其实是类似的,主要就是旋转要在局部坐标系下。
角度就有反三角,轴向就用叉积,就获得了。
一些比较好的项目
VPOSE 可以支持系数预测,判断姿态的好坏等
以上是关于动作捕捉,系数转换,IK 等整理总结的主要内容,如果未能解决你的问题,请参考以下文章