ROS从入门到精通系列(二十五)--常用工具值shell脚本启动多条指令
Posted Techblog of HaoWANG
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS从入门到精通系列(二十五)--常用工具值shell脚本启动多条指令相关的知识,希望对你有一定的参考价值。
1. shell命令启动ROS多个节点
#!/bin/bash
# ALL Right reserved HAO,WANG
# @autor: haowanghk@gmail.com
# @time: 2022-04-18-10:52
# @position: JIhualab,China
# launch dual_arm robot controller params and nodes
# Master node is in dual_arm robots
# launch VINS fusion and node transfer
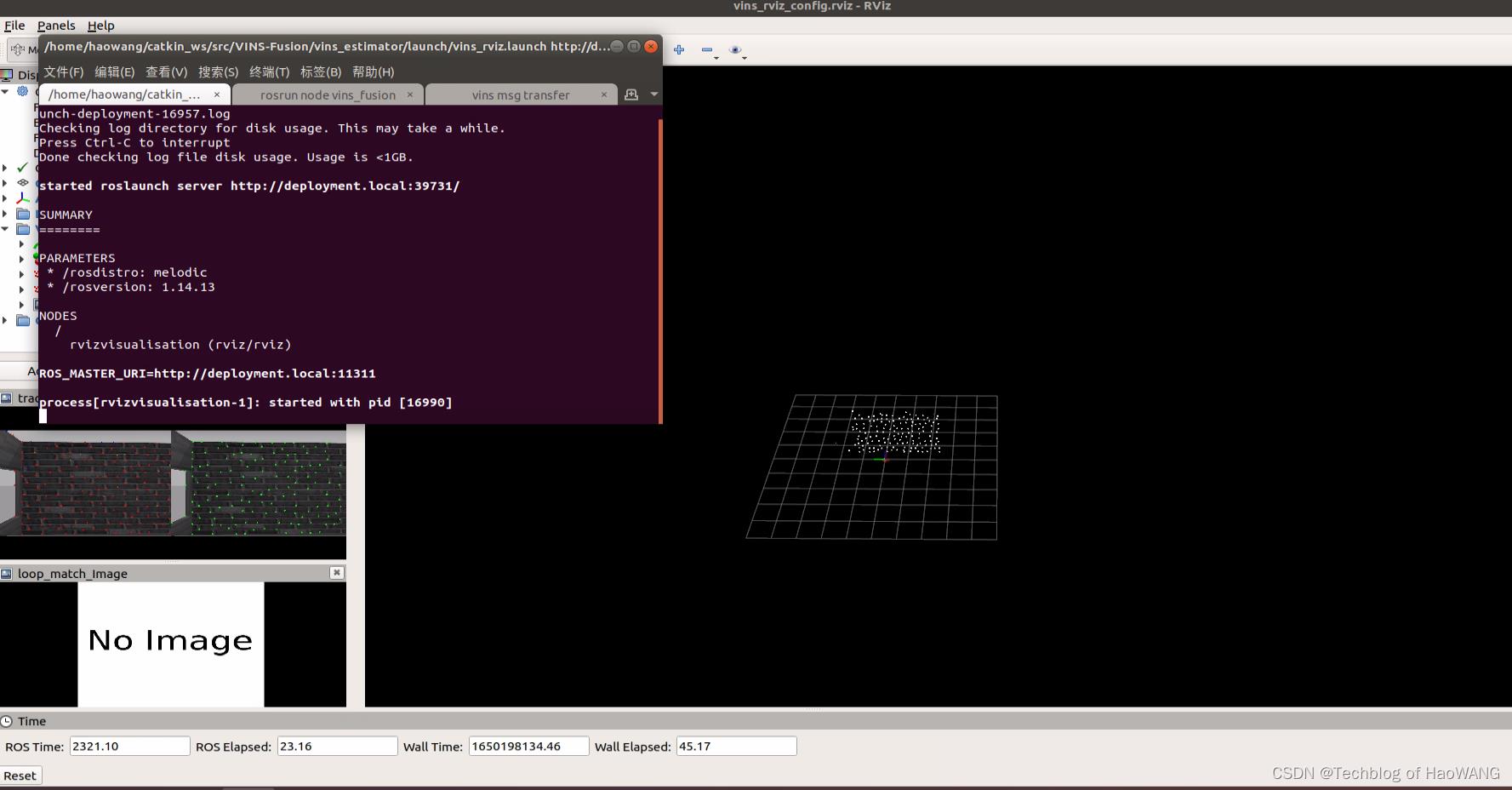
# 打开终端窗口
gnome-terminal --tab --title="roslaunch vins_rviz" -- bash -c "s以上是关于ROS从入门到精通系列(二十五)--常用工具值shell脚本启动多条指令的主要内容,如果未能解决你的问题,请参考以下文章
ROS从入门到精通系列(二十五)--常用ROS工具合集- 2. GazeboRvizMoveit
ROS从入门到精通系列(二十五)--常用ROS工具合集- 2. GazeboRvizMoveit
ROS从入门到精通系列(二十五)--常用ROS工具合集- 2. GazeboRvizMoveit
ROS从入门到精通系列(二十)rosbag & record 工具