机器学习入门之K近邻法
Posted Jarlene
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了机器学习入门之K近邻法相关的知识,希望对你有一定的参考价值。
K近邻法
K-近邻法是一种基本分类与回归算法。K-近邻法的输入为实例特征向量,对应于特征空间的点;输出为实例的类别,可以去多类。
K-近邻算法直观、简单:给定一个训练数据集,对新的输入实例,在训练实例中找到与该实例最邻近的k个实例,这k个实例多数属于某一类别,就把该输入实例分为该实例。
K近邻法模型
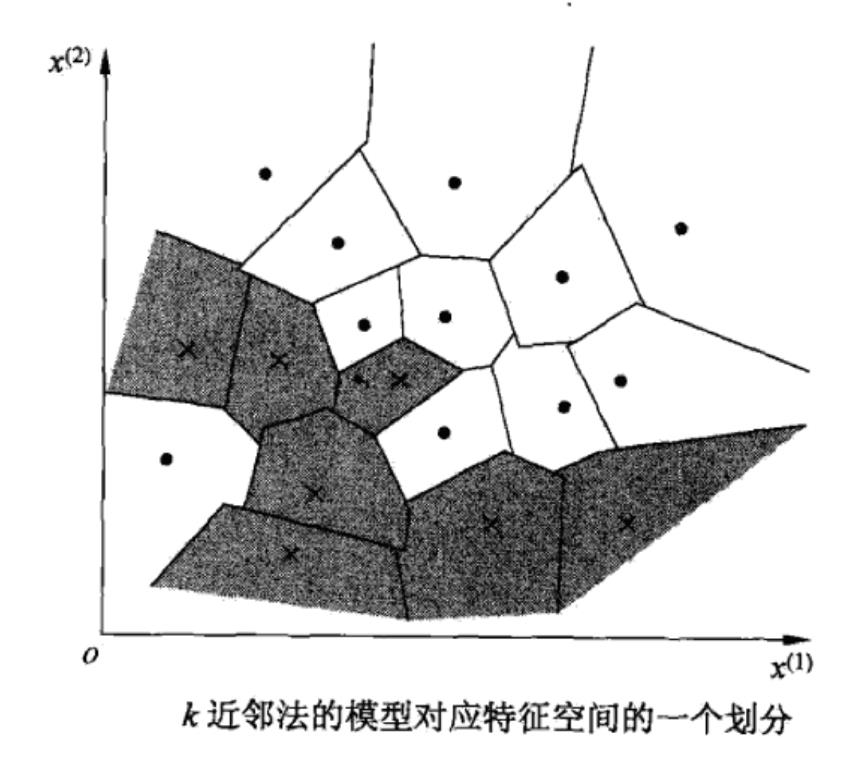
K近邻法使用的模型实际上对应的是特征空间的划分。模型有三个基本要素:距离度量,k值的选择,分类决策规则。
K近邻法中,当训练数据集、距离度量、k值、分类决策规则确定后,对于任意一个新的输入实例,它所属的类别是唯一确定的。这相当于更加上述要素将特征空间划分为一个个的子空间。确定子空间每个实例点所属类别。
在特征空间中,对于每一个训练的实例点,距离改点比其他点更近的点组成一个区域叫做单元(Cell)。每一个实例点都拥有一个单元。所有实例点的单元构成对整个特征空间的划分。最邻近法是将实例的类作为其单元中所有点的类标记(class label)。这样每个实例点类别就是确定的。如图所示。
1、距离度量
特征空间中,两个实例点的距离是两个实例点相似度的反映,k邻近模型的特种空间一般是n维实数向量空间Rn. 使用的距离是欧式距离,但也可以使用其他的距离,更一般的Lp距离和Minkowski距离。
2、k值选择
k值的选择会对k邻近法的结果产生重大的影响,
当k值较小,就相当于用较小的邻域中中训练的实例进行预测,学习的近似误差会减小,只有于输入实例较近训练实例才会对预测结果起作用,但缺点是学习的估计误差会增大,预测结果会对邻近实例点非常敏感。K值的较小意味着整体模型的复杂,容易发生过拟合。
当k值较大,就相当于用较大邻域中的训练实例数据进行预测。其优点是可以减少学习估计误差,但缺点是学习的近似误差会增大, 离实例点较远的训练实例也会对预测起作用。K值增大意味着模型简单。
在实际应用中,k值一般取一个较小的数值,通常采用交叉验证法来取最优k值。
3、分类决策规则
k邻近法中,分类决策规则往往是多数表决。多数表决法解释:如果分类的损失函数为0-1损失函数,分类函数为:

那么误差概率为:

对给定的实例x∈X,其最邻近的k个训练实例点构成集合N_k(x).如果N_k(x)涵盖的区域类别为Cj,那么误分类的概率是:

要使误分类率最小即经验风险最小,那么

就要最大。所以多数表决规则等价于经验风险最小化。
Kd树
实现k近邻法时,主要考虑的问题是如何对训练数据进行快速的k近邻搜索,这点在特征空间的维数大及训练数据容量大时尤其必要。
k近邻法最简单的实现就是线性扫描。这时需要计算输入实例于每一个训练实例的距离,当训练数据集特别大的时候,这是非常耗时的。为了提高k近邻法搜索效率,可以使用特殊的结构存储训练数据。以减少计算距离的次数。也就是我们kd树。
1、构造kd树
kd树是一种对k维空间中实例点进行存储以便对其进行快速检索的树形数据结构。Kd树是二叉树,表示对k维空间的一个划分,构造kd树相当于不断用垂直于坐标轴的超平面将k维空间切分,构成一序列的k维超矩形区域,kd树的每个节点对应一个k维超矩形区域。
构造kd树的方法如下:
构造根结点,使根结点对应于k维空间中包含所有实例的超矩形区域;通过递归方法不断对k维空寂进行切分,生成子结点。
在超矩形区域上选择一个坐标轴和在此坐标轴上的一个切分点,确定一个超平面,这个超平面通过选定的切分点并垂直于选定的坐标轴,将当前的超矩形区域切分为左右两个区域;这时实例被分到来年各个子区域中,这个过程直到子区域内没有实例时终止。在此过程中将实例保存在相应的结点上。
通常,依次选择坐标轴对空间切分,庁训练实例点在选定坐标轴上的中位数为切分点,这样得到的kd树是平衡的,平衡的kd树搜索时的效率未必最优。
构造平衡kd树算法:
输入:k维空间数据集

其中

输出:kd树
(1) 开始:构造根结点,根结点对应于包含T的k维空间的超矩形区域。
选择为坐标轴,以T中所以实例的坐标的中位数切分点,将根结点对应的超矩形区域切分为两个子区域。切分由通过切分点与坐标轴垂直的超平面实现。由根结点生成深度为1的左右子结点:左子结点对应坐标小于切分点的子区域,右子结点对应于坐标大于切分点子区域。将落在切分超平面上的实例点保存在根结点。
(2) 重复:对深度为j的结点,选择为切分的坐标轴,l=j(mod k) + 1,
以该结点的区域中所有实例的坐标的中位数为切分点。将该结点对应的超矩形区域切分为两个子区域。切分由通过切分点并与坐标轴垂直的超平面实现。由该结点生成深度为j+1的左、右子结点:左子结点对应坐标小于切分点区域,右子结点对应于坐标大于切分点子区域。
(3) 直到两个子区域没有实例存在时停止,从而形成kd树的区域划分。
kd树搜索
以最近邻为例:给定一个目标,搜索其最邻近。首选找到包含目标点的叶结点。然后从该叶结点出发,一次回退到父结点;不断查找与目标最邻近的结点,当确定不可能存在更近的结点时终止。这样就搜索被限制在空间的局部区域上,大大提高效率。
用kd树最近邻搜索算法:
输入:已构造的kd树,目标点x
输出:x最近邻
(1) 在kd树中找出包含目标点x的叶结点;从根结点出发,递归地向下访问kd树,若目标点x当前的维的坐标小于切分点的坐标,则移动到左子结点,否则移到右子结点,直到子结点为叶结点为止。
(2) 以此叶结点为“当前最近点”
(3) 递归地向上回退,在每个节点进行以下操作:
(a)如果该结点保存的实例点比当前最近点距离目标点更近,则以该实例点为“当前最近点”
(b)当前最近点一定存在于该结点一个子结点对应的区域。检查该子结点的父结点的另一个子结点对应的区域是否有更近点。具体地,检查另一子结点对应的区域是否与目标点为球鞋,以目标点与“当前最近点”间的距离为班级超球体相交。如果相交,可能在另一个子结点对应的区域内存在距目标点更近的点,移动到另一个子结点,接着递归地进行最近邻搜索;如果不相交,向上回退。
当回退到根结点时,搜索结束。最后的“当前最近点”即为x的最近邻点。
如果实例点是随机分布的,kd树搜索的平均计算复杂度是O(logN),这里N是训练实例数。kd树更适用于训练实例数远大于空间维数时的k近邻搜索。当空间维数接近训练实例数时,它的效率会迅速下降,几乎接近线性扫描。
最后附上kd树pyhton代码和搜索kd树python代码:
import copy
import itertools
from matplotlib import pyplot as plt
from matplotlib.patches import Rectangle
from matplotlib import animation
T = [[2, 3], [5, 4], [9, 6], [4, 7], [8, 1], [7, 2], [3, 5], [7, 2], [2, 7], [2, 5], [8, 2], [5, 9]]
def draw_point(data):
X, Y = [], []
for p in data:
X.append(p[0])
Y.append(p[1])
plt.plot(X, Y, 'bo')
def draw_line(xy_list):
for xy in xy_list:
x, y = xy
plt.plot(x, y, 'g', lw=2)
def draw_square(square_list):
currentAxis = plt.gca()
colors = itertools.cycle(["r", "b", "g", "c", "m", "y", '#EB70AA', '#0099FF'])
for square in square_list:
currentAxis.add_patch(
Rectangle((square[0][0], square[0][1]), square[1][0] - square[0][0], square[1][1] - square[0][1],
color=next(colors)))
def median(lst):
m = len(lst) / 2
return lst[m], m
history_quare = []
def build_kdtree(data, d, square):
history_quare.append(square)
# sort
data = sorted(data, key=lambda x: x[d])
# balance point
p, m = median(data)
# delete point
del data[m]
print data, p
if m >= 0:
sub_square = copy.deepcopy(square)
if d == 0:
sub_square[1][0] = p[0]
else:
sub_square[1][1] = p[1]
history_quare.append(sub_square)
if m > 0:
build_kdtree(data[:m], not d, sub_square)
if len(data) > 1:
sub_square = copy.deepcopy(square)
if d == 0:
sub_square[0][0] = p[0]
else:
sub_square[0][1] = p[1]
build_kdtree(data[m:], not d, sub_square)
build_kdtree(T, 0, [[0, 0], [10, 10]])
print history_quare
# draw an animation to show how it works, the data comes from history
# first set up the figure, the axis, and the plot element we want to animate
fig = plt.figure()
ax = plt.axes(xlim=(0, 2), ylim=(-2, 2))
line, = ax.plot([], [], 'g', lw=2)
label = ax.text([], [], '')
# initialization function: plot the background of each frame
def init():
plt.axis([0, 10, 0, 10])
plt.grid(True)
plt.xlabel('x_1')
plt.ylabel('x_2')
plt.title('build kd tree')
draw_point(T)
currentAxis = plt.gca()
colors = itertools.cycle(["#FF6633", "g", "#3366FF", "c", '#EB70AA', "y", '#0099FF', '#66FFFF', "m",])
# animation function. this is called sequentially
def animate(i):
square = history_quare[i]
currentAxis.add_patch(
Rectangle((square[0][0], square[0][1]), square[1][0] - square[0][0], square[1][1] - square[0][1],
color=next(colors)))
return
# call the animator. blit=true means only re-draw the parts that have changed.
anim = animation.FuncAnimation(fig, animate, init_func=init, frames=len(history_quare), interval=1000, repeat=False, blit=False)
plt.show()T = [[2, 3], [5, 4], [9, 6], [4, 7], [8, 1], [7, 2]]
class node:
def __init__(self, point):
self.left = None
self.right = None
self.point = point
self.parent = None
pass
def set_left(self, left):
if left == None: pass
left.parent = self
self.left = left
def set_right(self, right):
if right == None: pass
right.parent = self
self.right = right
def median(lst):
m = len(lst) / 2
return lst[m], m
def build_kdtree(data, d):
data = sorted(data, key=lambda x: x[d])
p, m = median(data)
tree = node(p)
del data[m]
if m > 0: tree.set_left(build_kdtree(data[:m], not d))
if len(data) > 1: tree.set_right(build_kdtree(data[m:], not d))
return tree
def distance(a, b):
print a, b
return ((a[0] - b[0]) ** 2 + (a[1] - b[1]) ** 2) ** 0.5
def search_kdtree(tree, d, target):
if target[d] < tree.point[d]:
if tree.left != None:
return search_kdtree(tree.left, not d, target)
else:
if tree.right != None:
return search_kdtree(tree.right, not d, target)
def update_best(t, best):
if t == None: return
t = t.point
d = distance(t, target)
if d < best[1]:
best[1] = d
best[0] = t
best = [tree.point, 100000.0]
while (tree.parent != None):
update_best(tree.parent.left, best)
update_best(tree.parent.right, best)
tree = tree.parent
return best[0]
kd_tree = build_kdtree(T, 0)
print search_kdtree(kd_tree, 1, [9, 4])以上是关于机器学习入门之K近邻法的主要内容,如果未能解决你的问题,请参考以下文章