正点原子I.MX6U-MINI应用篇4嵌入式Linux关于GPIO的一些操作
Posted 果果小师弟
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了正点原子I.MX6U-MINI应用篇4嵌入式Linux关于GPIO的一些操作相关的知识,希望对你有一定的参考价值。
一、应用层如何操作GPIO
先看看板子的文件系统目录。与LED设备一样,GPIO同样也是通过sysfs方式进行操控,进入到/sys/class/gpio目录下,如下所示:


可以看到该目录下包含两个文件export、unexport以及 5 个gpiochipX(X 等于 0、32、64、96、128)命名的文件夹。
- gpiochipX: 当前 SoC 所包含的 GPIO 控制器,我们知道I.MX6UL/I.MX6ULL一共包含了 5 个GPIO控制器,分别为 GPIO1、GPIO2、GPIO3、GPIO4、GPIO5,在这里分别对应 gpiochip0、gpiochip32、gpiochip64、gpiochip96、gpiochip128 这 5 个文件夹,每一个gpiochipX文件夹用来管理一组GPIO。随便进入到其中某个目录下,可以看到这些目录下包含了如下文件:

在这个目录我们主要关注的是 base、label、ngpio 这三个属性文件,这三个属性文件均是只读、不可写。
- base :与
gpiochipX中的 X 相同,表示该控制器所管理的这组 GPIO 引脚中最小的编号。每一个 GPIO引脚都会有一个对应的编号,Linux下通过这个编号来操控对应的GPIO引脚。

- label :该组 GPIO 对应的标签,也就是名字。

- ngpio :该控制器所管理的GPIO引脚的数量(所以引脚编号范围是:
base ~ base+ngpio-1)。

对于给定的一个GPIO引脚,如何计算它在sysfs中对应的编号呢?其实非常简单,譬如给定一个 GPIO引脚为GPIO4_IO16,那它对应的编号是多少呢?首先我们要确定GPIO4对应于gpiochip96,该组GPIO引脚的最小编号是 96(对应于 GPIO4_IO0),所以 GPIO4_IO16 对应的编号自然是96 + 16 = 112;同理GPIO3_IO20对应的编号是64 + 20 = 84。
- export :用于将指定编号的GPIO引脚导出。在使用GPIO引脚之前,需要将其导出,导出成功之后才能使用它。注意export文件是只写文件,不能读取,将一个指定的编号写入到export文件中即可将对应的GPIO引脚导出,譬如:
echo 0 > export #导出编号为0的GPIO引脚(对于I.MX6UL/I.MX6ULL来说,也就是GPIO1_IO0)
导出成功之后会发现在/sys/class/gpio目录下生成了一个名为gpio0的文件夹(gpioX,X 表示对应的编号),如图所示。这个文件夹就是导出来的GPIO引脚对应的文件夹,用于管理、控制该GPIO引脚。

- unexport :将导出的 GPIO 引脚删除。当使用完 GPIO 引脚之后,我们需要将导出的引脚删除,同样该文件也是只写文件、不可读,譬如:
echo 0 > unexport #删除导出的编号为0的GPIO引脚

删除成功之后,之前生成的 gpio0 文件夹就会消失!
以上就给大家介绍了/sys/class/gpio目录下的所有文件和文件夹,控制GPIO引脚主要是通过export导出之后所生成的gpioX(X 表示对应的编号)文件夹,在该文件夹目录下存在一些属性文件可用于控制GPIO引脚的输入、输出以及输出的电平状态等。
Tips:需要注意的是,并不是所有GPIO引脚都可以成功导出,如果对应的GPIO已经在内核中被使用了,那便无法成功导出,打印如下信息:那也就是意味着该引脚已经被内核使用了,譬如某个驱动使用了该引脚,那么将无法导出成功!

- gpioX将指定的编号写入到
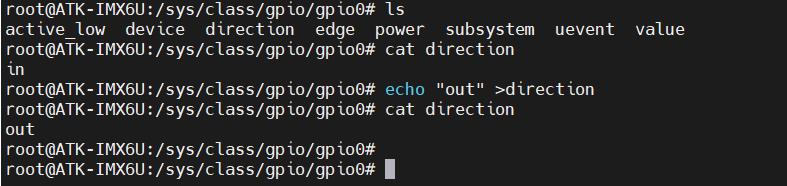
export文件中,可以导出指定编号的GPIO引脚,导出成功之后会在/sys/class/gpio目录下生成对应的gpioX(X表示GPIO的编号)文件夹,以前面所生成的gpio0为例,进入到gpio0目录,该目录下的文件如下所示:

我们主要关心的文件是active_low、direction、edge以及value这四个属性文件,接下来分别介绍这四个属性文件的作用:
- direction :配置 GPIO 引脚为输入或输出模式。该文件可读、可写,读表示查看 GPIO 当前是输入还是输出模式,写表示将GPIO配置为输入或输出模式;读取或写入操作可取的值为"out"(输出模式)和"in"(输入模式),如下所示:
- value :在 GPIO 配置为输出模式下,向value文件写入"0"控制GPIO引脚输出低电平,写入"1"则控制GPIO引脚输出高电平。在输入模式下,读取value文件获取GPIO引脚当前的输入电平状态。
譬如:
# 获取 GPIO 引脚的输入电平状态
echo "in" > direction
cat value
# 控制 GPIO 引脚输出高电平
echo "out" > direction
echo "1" > value
- active_low :这个属性文件用于控制极性,可读可写,默认情况下为 0,譬如:
# active_low 等于 0 时
echo "0" > active_low
echo "out" > direction
echo "1" > value #输出高
echo "0" > value #输出低
# active_low 等于 1 时
$ echo "1" > active_low
$ echo "out" > direction
$ echo "1" > value #输出低
$ echo "0" > value #输出高
由此看出,active_low 的作用已经非常明显了,对于输入模式来说也同样适用。
- edge :控制中断的触发模式,该文件可读可写。在配置 GPIO 引脚的中断触发模式之前,需将其设置为输入模式:
非中断引脚:echo "none" > edge
上升沿触发:echo "rising" > edge
下降沿触发:echo "falling" > edge
边沿触发:echo "both" > edge
当引脚被配置为中断后可以使用poll()函数监听引脚的电平状态变化,在后面的示例中将向大家介绍。
二、GPIO应用编程之输出
1.1 程序源码
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
static char gpio_path[100];
static int gpio_config(const char *attr, const char *val)
char file_path[100];
int len;
int fd;
sprintf(file_path, "%s/%s", gpio_path, attr);
if (0 > (fd = open(file_path, O_WRONLY)))
perror("open error");
return fd;
len = strlen(val);
if (len != write(fd, val, len))
perror("write error");
close(fd);
return -1;
close(fd); //关闭文件
return 0;
int main(int argc, char *argv[])
/* 校验传参 */
if (3 != argc)
fprintf(stderr, "usage: %s <gpio> <value>\\n", argv[0]);
exit(-1);
/* 判断指定编号的GPIO是否导出 */
sprintf(gpio_path, "/sys/class/gpio/gpio%s", argv[1]);
if (access(gpio_path, F_OK)) //如果目录不存在 则需要导出
int fd;
int len;
if (0 > (fd = open("/sys/class/gpio/export", O_WRONLY)))
perror("open error");
exit(-1);
len = strlen(argv[1]);
if (len != write(fd, argv[1], len)) //导出gpio
perror("write error");
close(fd);
exit(-1);
close(fd); //关闭文件
/* 配置为输出模式 */
if (gpio_config("direction", "out"))
exit(-1);
/* 极性设置 */
if (gpio_config("active_low", "0"))
exit(-1);
/* 控制GPIO输出高低电平 */
if (gpio_config("value", argv[2]))
exit(-1);
/* 退出程序 */
exit(0);
执行程序时需要传入两个参数,argv[1]指定GPIO的编号、argv[2]指定输出电平状态(0 表示低电平、1 表示高电平)。
上述代码中首先使用access()函数判断指定编号的GPIO引脚是否已经导出,也就是判断相应的gpioX目录是否存在,如果不存在则表示未导出,则通过/sys/class/gpio/export文件将其导出;导出之后先配置了GPIO引脚为输出模式,也就是向direction文件中写入out;接着再配置极性,通过向active_low 文件中写入0(不用配置也可以);最后再控制GPIO引脚输出相应的电平状态,通过对value属性文件写入1或0来使其输出高电平或低电平。
2.2 编译程序
我们要想给ARM板编译出程序,需要使用交叉编译工具链,交叉编译的工具链我们已经安装过了,详细请看【正点原子】I.MX6U嵌入式Linux驱动开发指南V1.x.pdf 的第4.3小节。我是用的是arm-linux-gnueabihf交叉编译工具链。使用arm-linux-gnueabihf-gcc -v可以查看交叉编译工具链的版本号。

然后就可以使用下面命令编译出可以在ARM板子上运行的可执行文件了。
arm-linux-gnueabihf-gcc -o gpio_out gpio_out .c
- 1、arm表示这是编译arm架构代码的编译器。
- 2、linux表示运行在linux环境下。
- 3、gnueabihf表示嵌入式二进制接口。
- 4、gcc表示是gcc工具。
这样编译出来的 led程序才可以在ARM板子上运行。执行file gpio_out 命令就可以看出hello是32位LSB的ELF格式文件,目标机架构为ARM,说明这个交叉编译正常,可执行文件可以在ARM板上执行。

2.3 上传程序到开发板执行
开发板启动后通过nfs挂载Ubuntu目录的方式,将相应的文件拷贝到开发板上。简单来说,就是通过NFS在开发板上通过网络直接访问ubuntu虚拟机上的文件,并且就相当于自己本地的文件一样。
开发板想访问/home/zhiguoxin/myproject/alientek_app_development_source这个目录中的文件,就要把/home/zhiguoxin/myproject/alientek_app_development_source挂载到开发板的mnt目录,这样就可以通过nfs来访问/home/zhiguoxin/myproject/alientek_app_development_source了。
因为我的代码都放在/home/zhiguoxin/myproject/alientek_app_development_source这个目录下,所以我们将这个目录作为NFS共享文件夹。设置方法参考移植SQLite3、OpenCV到RV1126开发板上开发人脸识别项目第一章。
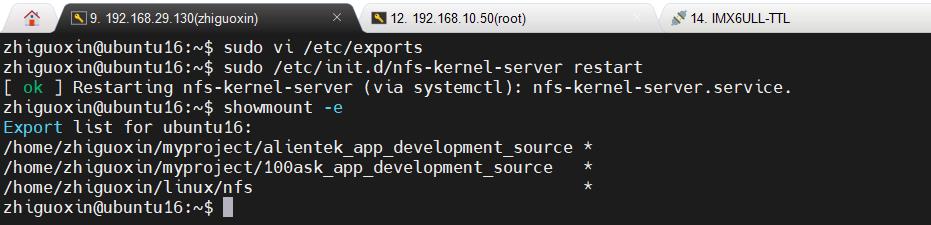

Ubuntu IP为192.168.10.100,然后一般都是挂载在开发板的mnt目录下,这个目录是专门用来给我们作为临时挂载的目录。

然后使用MobaXterm软件通过SSH访问开发板。
ubuntu ip:192.168.10.100
windows ip:192.168.10.200
开发板ip:192.168.10.50
在开发板上执行以下命令:
mount -t nfs -o nolock,vers=3 192.168.10.100:/home/zhiguoxin/myproject/alientek_app_development_source /mnt
就将开饭的mnt目录挂载在ubuntu的/home/zhiguoxin/myproject/alientek_app_development_source目录下了。这样我们就可以在Ubuntu下修改文件,然后可以直接在开发板上执行可执行文件了。当然我这里的/home/zhiguoxin/myproject/和windows之间是一个共享目录,我也可以直接在windows上面修改文件,然后ubuntu和开发板直接进行文件同步了。

这里以板子上的 GPIO1_IO01 引脚为例,该引脚在底板上已经引出

然后编译,可以编译成功。
./gpio_out 1 1 #控制GPIO1_IO01输出高电平
./gpio_out 1 0 #控制GPIO1_IO01输出高电平

执行相应的命令后,可以使用万用表或者连接一个LED小灯进行检验,以验证实验结果!
三、GPIO应用编程之输入
3.1 程序源码
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
static char gpio_path[100];
static int gpio_config(const char *attr, const char *val)
char file_path[100];
int len;
int fd;
sprintf(file_path, "%s/%s", gpio_path, attr);
if (0 > (fd = open(file_path, O_WRONLY)))
perror("open error");
return fd;
len = strlen(val);
if (len != write(fd, val, len))
perror("write error");
close(fd);
return -1;
close(fd); //关闭文件
return 0;
int main(int argc, char *argv[])
char file_path[100];
char val;
int fd;
/* 校验传参 */
if (2 != argc)
fprintf(stderr, "usage: %s <gpio>\\n", argv[0]);
exit(-1);
/* 判断指定编号的GPIO是否导出 */
sprintf(gpio_path, "/sys/class/gpio/gpio%s", argv[1]);
if (access(gpio_path, F_OK)) //如果目录不存在 则需要导出
int len;
if (0 > (fd = open("/sys/class/gpio/export", O_WRONLY)))
perror("open error");
exit(-1);
len = strlen(argv[1]);
if (len != write(fd, argv[1], len)) //导出gpio
perror("write error");
close(fd);
exit(-1);
close(fd); //关闭文件
/* 配置为输入模式 */
if (gpio_config("direction", "in"))
exit(-1);
/* 极性设置 */
if (gpio_config("active_low", "0"))
exit(-1);
/* 配置为非中断方式 */
if (gpio_config("edge", "none"))
exit(-1);
/* 读取GPIO电平状态 */
sprintf(file_path, "%s/%s", gpio_path, "value");
if (0 > (fd = open(file_path, O_RDONLY)))
perror("open error");
exit(-1);
if (0 > read(fd, &val, 1))
perror("read error");
close(fd);
exit(-1);
printf("value: %c\\n", val);
/* 退出程序 */
close(fd);
exit(0);
执行程序时需要传入一个参数,argv[1]指定要读取电平状态的GPIO对应的编号。上述代码中首先使用access()函数判断指定编号的GPIO引脚是否已经导出,若未导出,则通过/sys/class/gpio/export文件将其导出;导出之后先配置了GPIO引脚为输入模式,也就是向direction文件中写入in;接着再配置极性、设置 GPIO 引脚为非中断模式(向 edge 属性文件中写入none)。最后打开value属性文件,读取GPIO的电平状态并将其打印出来。
3.2 编译程序
我们要想给ARM板编译出程序,需要使用交叉编译工具链,交叉编译的工具链我们已经安装过了,详细请看【正点原子】I.MX6U嵌入式Linux驱动开发指南V1.x.pdf 的第4.3小节。我是用的是arm-linux-gnueabihf交叉编译工具链。使用arm-linux-gnueabihf-gcc -v可以查看交叉编译工具链的版本号。
然后就可以使用下面命令编译出可以在ARM板子上运行的可执行文件了。
arm-linux-gnueabihf-gcc -o gpio_in gpio_in .c
- 1、arm表示这是编译arm架构代码的编译器。
- 2、linux表示运行在linux环境下。
- 3、gnueabihf表示嵌入式二进制接口。
- 4、gcc表示是gcc工具。
这样编译出来的 led程序才可以在ARM板子上运行。执行file gpio_in 命令就可以看出hello是32位LSB的ELF格式文件,目标机架构为ARM,说明这个交叉编译正常,可执行文件可以在ARM板上执行。

2.3 上传程序到开发板执行
开发板启动后通过nfs挂载Ubuntu目录的方式,将相应的文件拷贝到开发板上。简单来说,就是通过NFS在开发板上通过网络直接访问ubuntu虚拟机上的文件,并且就相当于自己本地的文件一样。
开发板想访问/home/zhiguoxin/myproject/alientek_app_development_source这个目录中的文件,就要把/home/zhiguoxin/myproject/alientek_app_development_source挂载到开发板的mnt目录,这样就可以通过nfs来访问/home/zhiguoxin/myproject/alientek_app_development_source了。
因为我的代码都放在/home/zhiguoxin/myproject/alientek_app_development_source这个目录下,所以我们将这个目录作为NFS共享文件夹。设置方法参考移植SQLite3、OpenCV到RV1126开发板上开发人脸识别项目第一章。
Ubuntu IP为192.168.10.100,然后一般都是挂载在开发板的mnt目录下,这个目录是专门用来给我们作为临时挂载的目录。
然后使用MobaXterm软件通过SSH访问开发板。
ubuntu ip:192.168.10.100
windows ip:192.168.10.200
开发板ip:192.168.10.50
在开发板上执行以下命令:
mount -t nfs -o nolock,vers=3 192.168.10.100:/home/zhiguoxin/myproject/alientek_app_development_source /mnt
就将开饭的mnt目录挂载在ubuntu的/home/zhiguoxin/myproject/alientek_app_development_source目录下了。这样我们就可以在Ubuntu下修改文件,然后可以直接在开发板上执行可执行文件了。当然我这里的/home/zhiguoxin/myproject/和windows之间是一个共享目录,我也可以直接在windows上面修改文件,然后ubuntu和开发板直接进行文件同步了。
这里以板子上的GPIO1_IO01引脚为例,该引脚在底板上已经引出:
首先通过杜邦线将GPIO1_IO01引脚连接到板子上的3.3V电源引脚上,接着执行命令读取GPIO电平状态:
./gpio_in 1

打印出的value等于1,表示读取到GPIO的电平确实是高电平;接着将GPIO1_IO01引脚连接到板子上的GND引脚上,执行命令:
./gpio_in 1

打印出的value等于0,表示读取到GPIO的电平确实是低电平;测试结果与实际相符合!
四、GPIO应用编程之中断
4.1 程序源码
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
#include <poll.h>
static char gpio_path[100];
static int gpio_config(const char *attr, const char *val)
char file_path[100];
int len;
int fd;
sprintf(file_path, "%s/%s", gpio_path, attr);
if (0 > (fd = open(file_path, O_WRONLY)))
perror("open error");
return fd;
len = strlen(val);
if (len != write(fd, val, len))
perror("write error");
return -1;
close(fd); //关闭文件
return 0;
int main(int argc, char *argv[])
struct pollfd pfd;
char file_path[100];
int ret;
char val;
/* 校验传参 */
if (2 != argc)
fprintf(stderr, "usage: %s <gpio>\\n", argv[0]);
exit(-1);
/* 判断指定编号的GPIO是否导出 */
sprintf(gpio_path, "/sys/class/gpio/gpio%s", argv[1]);
if (access(gpio_path, F_OK)) //如果目录不存在 则需要导出
int len;
int fd;
if (0 > (fd = open("/sys/class/gpio/export", O_WRONLY)))
perror("open error");
exit(-1);
len = strlen(argv[1]);
if (len != write(fd, argv[1], len)) //导出gpio
perror("write error");
以上是关于正点原子I.MX6U-MINI应用篇4嵌入式Linux关于GPIO的一些操作的主要内容,如果未能解决你的问题,请参考以下文章