2022年中国研究生数学建模竞赛A题-移动场景超分辨定位问题
Posted studyer_domi
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了2022年中国研究生数学建模竞赛A题-移动场景超分辨定位问题相关的知识,希望对你有一定的参考价值。
在日常家庭生活中,人们可能需要花费大量时间去寻找随意摆放在家中某些角落里的小物品。但如果给某些重要物品贴上电路标签,再利用诸如扫地机器人的全屋覆盖能力,可以精准定位到这些物体,将极大地提升人们生活的便利性。而在智能辅助驾驶或者自动驾驶领域,更需要精准探测邻近车辆、行人的位置及速度,来控制车速、转向和刹车等以免发生意外。这些都属于移动场景定位问题。显然,定位的精度越高,应用价值越大,特别是超分辨率定位,具有广阔的应用前景。
现有移动场景定位产品通常采用调频连续波雷达FMCW (frequency-modulated continuous-wave) ,通过发射线性增长频率的信号波,以及接收反射回来的信号波来进行定位,示意图如下
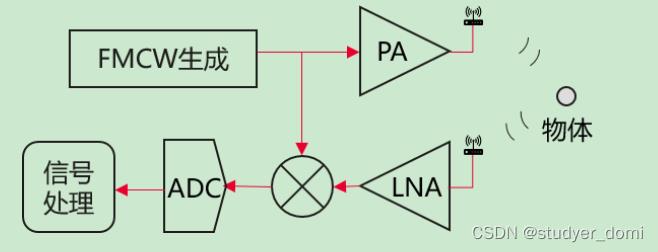
其中PA(Power Amplifier),LNA(Low Noise Amplifier),ADC(Analogue-to-Digital Converter)。现有产品大多采用基线算法,其得到的分辨率较低,不能满足日益增长的超分辨定位需求,亟需通过建模以及设计对应算法来提高分辨率,以提升产品竞争力。
华为每年的题目一定和信号处理、雷达 相关的,今年也是一样,推荐电信、物理、信号处理等专业的同学做这个题目,毕竟专业强相关,容易获奖,题目介绍中给出了比较详细的模型和推导公式,可以按照这个进一步开展模型建立,
问题1:根据题目给定的公式就可以求解,难点在于求解数学模型,
问题2:考虑到噪音问题,判断是否需要滤波等,文中给出了3种不同算法,建议看看最新的文献是否有改进算法
移动场景超分辨率定位是指:在上述移动场景下,设计鲁棒的低复杂度在线算法,实时超分辨率定位到物体。(不妨假设天线半径远小于物体的距离)
现有算法及研究现状:
- 现有产品中基线算法是通过加Hamming窗,然后做FFT来测距、测角。优点是复杂度低,缺点是分辨率较低。
- 传统算法如MUSIC算法,通过空间平滑化滤波以及特征子空间的分解来分离信号空间和噪声空间,但是也会造成分辨率下降以及受噪声的较大干扰。
- 现有的压缩感知算法利用了空间物体分布的稀疏性,可以有效提升分辨率,但处理这种连续傅里叶字典场景并设计低复杂度算法是一个巨大的挑战。
问题:
- 针对提供的无噪声仿真数据,建立定位模型,计算出物体相对位置,并以二维极坐标图(横坐标表示距离,纵坐标表示角度)展示。
- 针对提供的高斯噪声仿真数据,利用一个chirp周期内的IF信号,设计超分辨算法精确定位多个物体。
- 设计在线低复杂度算法,利用一帧中频信号来超分辨定位,并且通过数值实验验证算法性能。针对提供的一帧数据,计算出物体相对运动轨迹,并以二维图(横坐标表示距离,纵坐标表示角度)展示。
- 考虑实际场景中由于老化等原因,天线阵列对于自身的定位也会有误差。针对提供的仿真数据,设计提升定位算法的鲁棒性的改进算法。
附录:
[1] 毫米波雷达传感器基础知识https://www.ti.com/cn/lit/wp/zhcy075/zhcy075.pdf?ts=1657869722417&ref_url=https%253A%252F%252Fwww.google.com%252F
[2] Herman, M. A., & Strohmer, T. (2009). High-resolution radar via compressed sensing. IEEE transactions on signal processing, 57(6), 2275-2284.
[3] F. Belfiori, W. van Rossum, and P. Hoogeboom, “2D-MUSIC technique applied to a coherent FMCW MIMO radar,” in Radar Systems (Radar 2012), IET International Conference on, Glasgow, United Kingdom, Oct 2012, pp. 1–6.
数据说明:
- 附件data_q1.npy(data_q1.mat),data_q2.npy(data_q2.mat),data_q3.npy(data_q3.mat),data_q4.npy(data_q4.mat)分别对应于问题1-4中场景的仿真数据。
- 在各个场景下,均假设有���(需要确定)个物体在雷达的探测范围内(以原点为中心半径10米以内、开口向上张开圆心角为100°的扇形区域)。
- 已知的参数如下:
名词解释:
- 超分辨率:一般理解是极大化对物体细节的显示能力。本题是指在有多物体信号叠加时,极大化物体定位精度。
- 等效虚拟天线阵列:调制好电磁波的波形后,个发射天线是依次进行发射,个接收天线也会依次接收到返回的信号。由于此周期极短,所以可以等效成个天线同时发射接收。
以上是关于2022年中国研究生数学建模竞赛A题-移动场景超分辨定位问题的主要内容,如果未能解决你的问题,请参考以下文章