第十七届智能车竞赛技术报告-无线充电组-山东大学(威海)
Posted 卓晴
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了第十七届智能车竞赛技术报告-无线充电组-山东大学(威海)相关的知识,希望对你有一定的参考价值。

袁浩
孙林
带队教师:王小利

一、关于车模充电讲解
第十七届全国大学生智能车竞赛山大威海无线充电组 车模回复后演示视频 2
二、关于车模运行时间
第十七届全国大学智能车京赛无线充电组 山大威海车模 - 恢复视频1
三、车模制作分享
第十七届全国大学智能车竞赛无线充电组 - 山大威海无线充电阻队伍 技术分享ppt
01 引 言
1.1 智能车研究背景
全国大学生智能汽车竞赛以智能汽车为研究对象,依托汽车电子背景,设置不同组别,让参赛学生利用电子、图像识别、传感技术、机械结构等知识完成对应的组别,设置竞速赛、创意赛等竞赛形式,竞赛出最优秀的队伍。该竞赛综合锻炼了我们的电子信息技术、团队配合能力以及工程实践能力,贯彻落实“政府倡导、专家主办、学生主体、社会参与”的 16字方针,充分调动各方面积极性,通过规则透明的竞争机制,赛出风格、赛出水平。
在我们的实际参与中,竞赛过程主要分为理论设计、实物制作、现场调试及比赛等环节,面临着软件和硬件等各种理论与实际的差距,需要结合单片机性能、场地实际情况以及电路 PCB经验等不断加以改进。我们的组别为无线充电组,该组别需要综合考虑速度、充电效率、硬件承受能力等条件,让小车利用赛道上采集到的电能驱动电机行驶,对于控制、电路、图像识别是极大的挑战,需要团队成员分工后不断配合,互相协调。正是这些难处,恰巧是这个比赛最激动人心的地方,科学和趣味融为一体,我们作为一支参赛团队,受益匪浅。
1.2 方案总体介绍
无线充电组采用往返赛道,并且驱动电路的电能需要从赛道上的充电线圈中获取。根据竞赛规则相关规定,本次比赛所用的车模别采用大赛组委会指定的 F型车模或者 G车模,在通过对于车模重量和轴距以及对于节能的比较中选择 G车模为本队伍竞赛车模。以 TC264芯片为核心控制器,在 ADS开发环境中进行软件开发。 G车模的传感器有采集角度的加速度计陀螺仪 ICM20602,以及定位线圈位置的 150KHZ电磁采集板,采集车轮转速的编码器,采集赛道位置信息的摄像头。
此外,还采用了液晶作为输出设备,实现对于车模当前状态的显示。并且运用英飞凌公司的 TLD2331芯片制作灯板,作为车模运行过程中电量的实时显示。后利用超级电容模块对电能进行储存与供给。
1.3 技术方案实现说明
主板控制方案采用 TC264作为主控,对充电的选择和电桩识别,传感器的配合和应用,驱动的速度控制和差速转向进行整体控制。
无线充电组最为重要的是赛道上能源的获取,充电方案为为重要的技术方案之一, LCC充电方案和恒功率充电方案为主流的两个方案。在通过测试适应性,充电效率,以及电压采集等特性后选择 LCC为本队充电方案。 LCC谐振变换器具有良好的恒流特性,在实际充电方案设计中对 LCC网络进行补偿方案的添加,来优化智能车在实际行驶过程中,或者在电能接收过程中负载电流的波动和对不稳定情况的消除,进而对充电以及整个系统的稳定性达到提升的目的。并且利用 ADC采集电路,实时检测电压,在对于路况和行驶距离的实际分析下进行停车充电和起步离开电桩的认为,在不需要满电的时候做到即停即走减少不必要的时间损耗。
对于电桩的检测采用对称的 150KHZ检测板的技术方案,通过对发射线圈电感值的检测做到对于电桩的找寻任务,并且通过对称电感的设计调整最佳充电位置达到最快功率充电。
灯板方案利用 ADC采集电路采集回的电压值,利用英飞凌公司的 TLD2331芯片对 12-15个灯进行控制 .
驱动方案采用 BTN7971驱动方案,对于 G车模自带 380电机进行控制,有较好的输出能力。
其余传感器方案采用陀螺仪 ICM20602,总钻风摄像头等对于车模姿态以及循迹和元素进行识别和相应的控制。
02 机械设计
2.1 智能车车型选择
第十七届全国大学生智能汽车竞赛无线充电组别要求车模在运行过程中需要使用三轮车模,可以使用竞赛指定车模中的 F、G车模。 F车模的优点是机械结构精度高,齿轮的啮合度,车轴的稳定性优良。 G车模的优点是轮距较宽,车身重量轻,在实地测试后,以及本组别对于节能的要求选择自重较小,转弯节省能量的 G车模。便于在能量有限的情况下对于速度的提升。
2.2 加速度计陀螺仪安装位置

▲ 图2.2.1 加速度和陀螺仪的位置
车模中加速度计陀螺仪使用的是逐飞科技的 ICM20602,实现角速度和重力加速度的测量计算,用于测量车模角度来辅助左右转向以及车体自身控制。为了使得加速度计不要受到过多的干扰,最大限度的保证陀螺仪的水平稳定,同时不受外界碰撞干扰,选择将其安装在 G车模两个电机之间并且用热熔胶粘贴保持其稳定性,好处是不易受到碰撞,且更加贴合车架并可以很好的水平放置。便于参数的传递以及控制方案的实行。
2.3 用于主控电池的安装
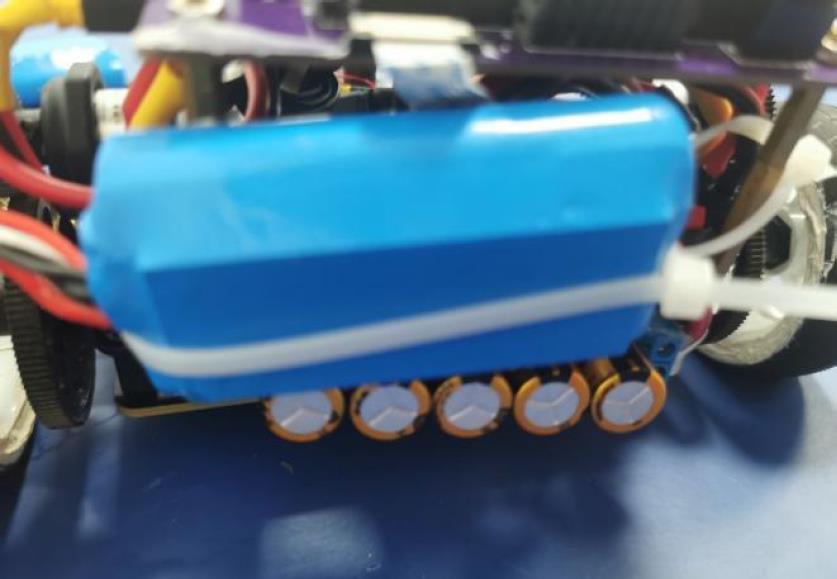
▲ 图2.3.1 用于主控的电池安装方式
本车选用逐飞科技 7.4V2200mA锂电池用于对于除驱动电路外模块和电路的供电。为保证车模重心将其放置尾部,并且为了最大程度减少车模自重,舍弃传统电池架,选择使用轧带固定。
2.4 线圈检测板的安装为
了检测线圈位置以及可以对停车位置进行调整以达到最大功率充电的目的选择使用两个检测板并将其对称安放于车身两侧。使其电感值采集同步能够做出判断并达到调整的功能。
2.5 电路板的分类和安装
本车由驱动板,主控板,充电接收板,信号检测板,灯板以及超级电容模块组成,由于组别的特殊性板子种类较多,以及由于车身自重对于节能的影响选择热熔胶和较少铜柱进行安装和固定。
2.6 接收线圈的安装
由于 G车模底盘较高在容易过坡道的情况下,造成线圈离地面过远充电效率下降的弊端,因此选择将路肩的海绵切割开固定于万向轮两侧再将线圈固定进而达到贴合地面增加充电效率的目的。并且将线圈置于车身相对靠前位置可以便于识别以及之后启停的动作和对于坡道的影响。
03 电路设计
3.1 电源模块的硬件设计
电源模块为系统其他各个模块提供所需要的电源。设计中,除了需要考虑电压范围和电流容量等基本参数之外,还要在电源转换效率、降低噪声、防止干扰和电路简单等方面进行优化。对于电源模块我们的要求是可靠。为了达到这个要求我们将数字信号和模拟信号进行了隔离。以及模块对于具体电压的不同采用不同芯片。
- 5V电源模块:

▲ 图3.1.1 5V电源
- 常规 3.3V电源模块:
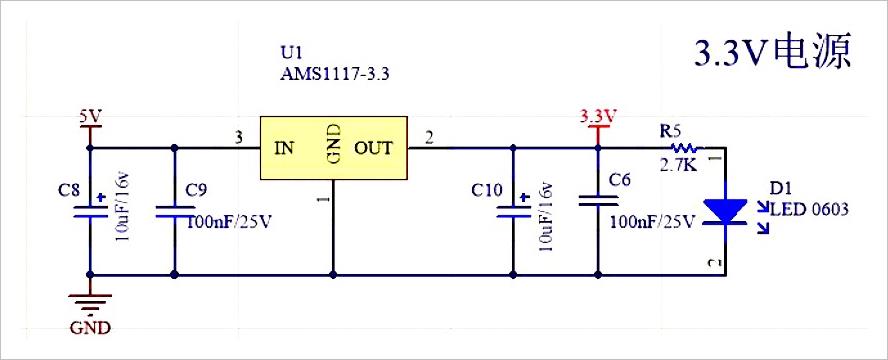
▲ 图3.1.2 常规3.3V电源电路
- 摄像头专用 3.3V电源模块:

▲ 图3.1.3 摄像头专用3.3V电源电路
3.2 电机驱动模块的设计
在栅极驱动芯片选择方面,我们选择 BTN7971芯片,双路驱动由 4片 BTN7971芯片构成。其载流能力强可以在较小电压下使电机保持运动符合无线充电组特点,原理如图所示:

▲ 图3.2.1 电机驱动电路
为了防止电机的电感产生的电动势倒灌,驱动模块采用 74ls08对信号进行隔离。
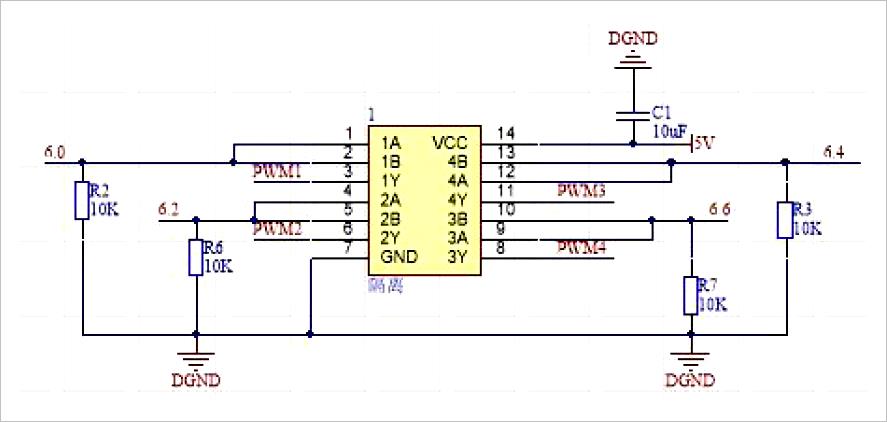
▲ 图3.2.2 驱动隔离电路
3.3 无线充电模块的设计
- 整流模块:对于电流波动进行整理,并且考虑其耐压值问题。
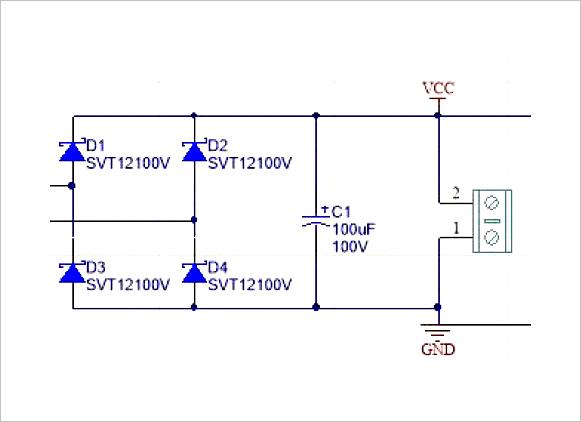
▲ 图3.3.1 整流模块
- 谐振部分:
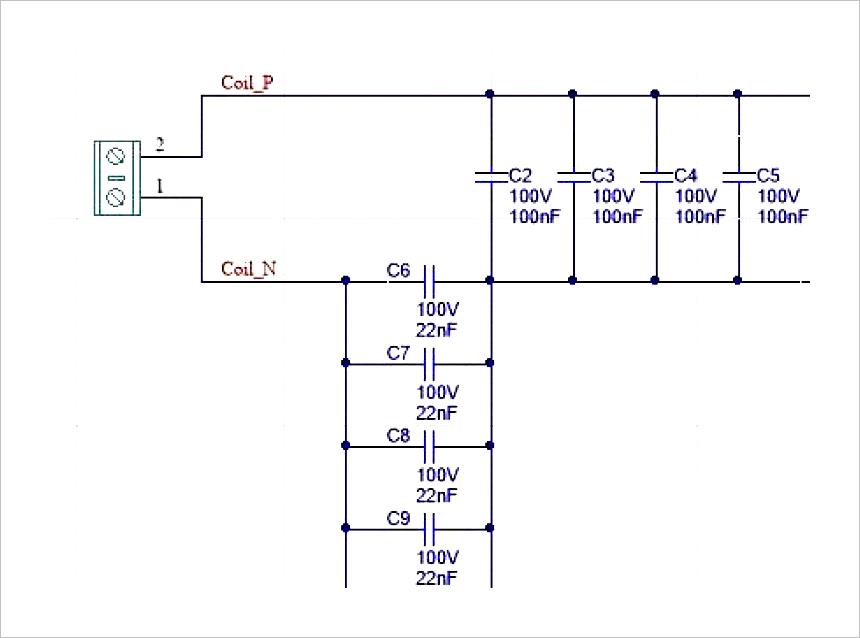
▲ 图3.3.2 谐振电路
3.4 电磁检测板设计
因为对于线圈的的判断的要求需要使用该模块对于电磁信号进行采集所以设计此模块:

▲ 图3.4.1 电磁检测板
3.5 灯板设计
因为本组别需要的特殊要求以及对于电量检测的实时展示,采用 TLD2331芯片进行矩阵灯控制:

▲ 图3.5.1 点亮显示板电路
04 软件设计
4.1 赛道识别
考虑到单片机运行速度与能力,对赛道识别的处理主要提取少而精的特征。主要分为二值化,边界提取,元素边界判断三部分。本程序中对灰度图像进行二值化,主要采用迭代法进行逐步逼近;由于二值化之后的赛道图像具有明显的连续边界,因此边界提取过程以八邻域为核心思想。为防止丢失边界造成的边界跟踪失败,需要进行预处理,将采取的图像的四边均设为零,同时能大大减少遇到图像边界时需要考虑的情况,方便边界提取。
从提取的边界信息中,可以得到每一行的赛道宽度与左右边界变化情况,元素边界提取则主要通过以上特征进行识别。此次比赛的赛道元素主要分为左右车库,左右 alpha弯道,左右 P弯道以及三叉元素。左右车库的识别主要通过斑马线以及对应边线的突变进行判定;左右 alpha弯道以及左右 P弯道的区分则需要进行动态判断,在识别到对应丢边之后,判断丢边行数变化情况进行区分赛道类型,而对于三叉元素判断,只需要判断两边界拐点即可。当判断出对应元素之后即可根据对应赛道类型对左右边界进行修改,以得到正确的中线,引导智能车路径。
4.2 陀螺仪传感器采集处理算法
对于传感器的串口信号,单片机通常需要经过一定的处理才能加以利用,常用的信号处理办法有一阶互补滤波、融合滤波和卡尔曼滤波方法。对于陀螺仪采用卡尔曼滤波方法。
卡尔曼滤波是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行估计的方法。

▲ 图4.2.1 陀螺仪传感器处理算法
4.3 150kHZ检测板程序
由于小车在赛道上需要进行停车充电,故需要对于充电位置进行准确检测。小车方案中我们采用 150kHZ检测板,通过 ADC采集检测板电压信息,推算出磁场强度,当磁场强度大于某一阈值的时候,输出控制指令命令小车停车充电,同样需要对于数据进行处理,采用卡尔曼滤波的方法进行软件去噪。
4.4 编码器传感器处理算法
同样采用卡尔曼滤波的方法对于两个编码器的数据进行预处理,然后通过直接计算两个编码器的均值得出车体的目前速度。
4.5 灯板程序
灯板采用的是 LED矩阵灯,我们采用的亮灯方式是,灯的个数代表电量的多少,灯板上的灯越多,代表电量越多。灯的点亮方式为同时点亮多个灯,那么要做到这一点,就一定需要扫描程序。为此,我们采用中断扫描的方式,对于扫描设置中断周期,使得该中断既不浪费资源,又不会让灯闪烁过于频繁,采用行扫描的方式。工作流程主要是,首先根据实际电量数值,然后在每一次中断中依次激活某一行的某几个灯,来回循环,当循环频率达到一定程度时,在人眼的视觉中,灯即为常亮,这是矩阵灯软件扫描的基本原理,我们的程序如下:
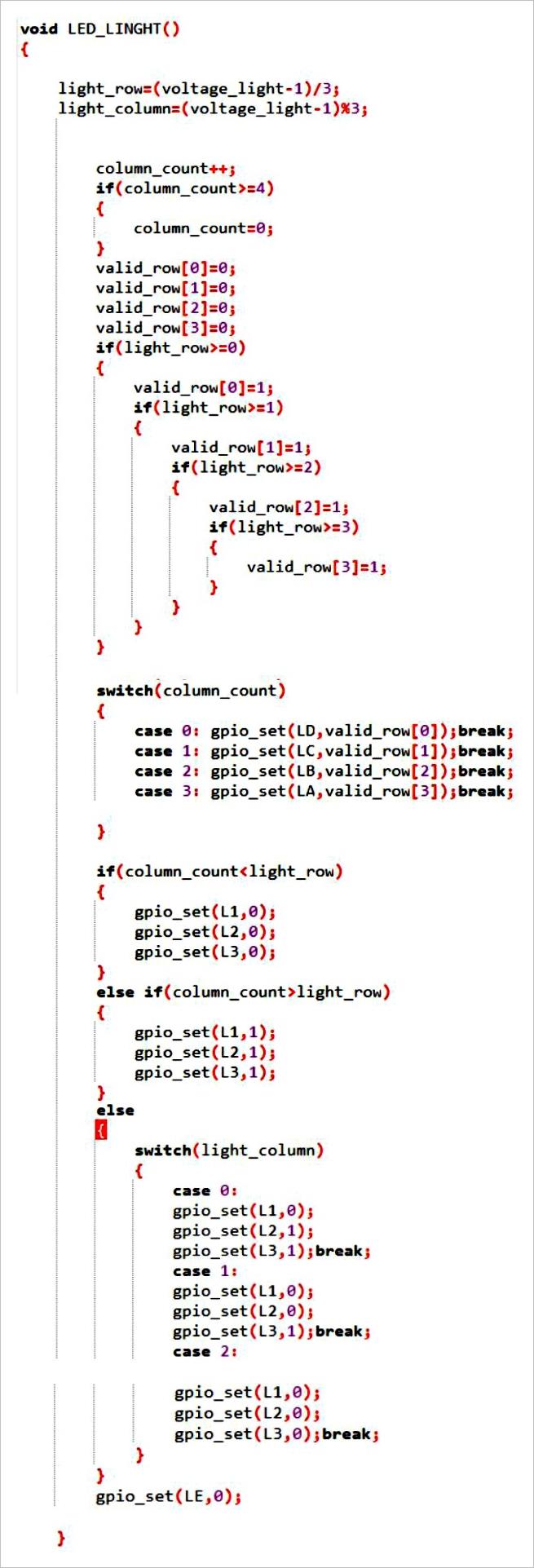
▲ 图4.5.1 灯板程序
4.6 控制程序
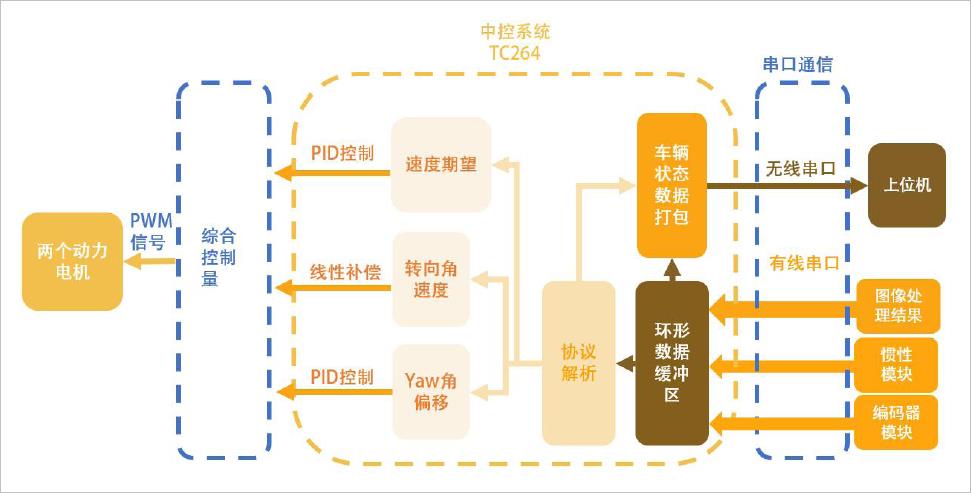
▲ 图4.6.1 控制程序框架
整体控制方案如图所示,将图像处理结果(Yaw角)、陀螺仪模块(ICM20602)以及编码器模块的数据进行融合处理,最终得到一个分别输出给两个电机的 PWM信号,实现车辆的赛道循迹、定点停车功能,对于速度和 Yaw角度偏移主要通过 PID控制来弥补目标和当前速度的差距。
PID控制是一种工业系统中常用的控制方案,将误差的比例、积分和微分综合从而实现原理简单、强鲁棒性的控制器。 C语言代码如下所示:

▲ 图4.6.2 PID 主函数
对于速度和 Yaw角误差,采用两个不同的 PID控制函数,通过调整 PID参数来适应整个赛道的速度和循迹要求。
由于赛道上会存在打滑、漂移等路面与轮胎接触参数变化的状况,为此,采用陀螺仪模块通过实时监测车体的角速度,对于不正常的转向进行实时修正,从而解决车体打滑等状况,能够大大减小运行需要的能量以及提高整体速度。