基于激光雷达的深度图杆状物提取器在城市环境中长期定位方法
Posted Being_young
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于激光雷达的深度图杆状物提取器在城市环境中长期定位方法相关的知识,希望对你有一定的参考价值。
文章:Online Range Image-based Pole Extractor for Long-term LiDAR Localization in Urban Environments
作者:Hao Dong, Xieyuanli Chen, Cyrill Stachniss
编译:点云PCL
代码:https://github.com/PRBonn/pole-localization.git
本文仅做学术分享,如有侵权,请联系删除。欢迎各位加入免费知识星球,获取PDF论文,欢迎转发朋友圈。内容如有错误欢迎评论留言,未经作者允许请勿转载,欢迎各位同学积极分享和交流。
公众号致力于分享点云处理,SLAM,三维视觉,高精地图相关的文章与技术,欢迎各位加入我们,一起每交流一起进步,有兴趣的可联系微信:920177957。本文来自点云PCL博主的分享,未经作者允许请勿转载,欢迎各位同学积极分享和交流。
摘要
可靠而准确的定位对于自动驾驶系统是至关重要。杆状物体,如交通标志、杆子、灯等,由于其地方独特性和长期稳定性,是城市环境中定位的理想标志物。在本文中,我们提出了一种新颖、准确、快速的杆状物提取方法,该方法可以实现在线运行,计算量小,因此可以将这些信息用于定位系统,该方法直接在3D激光雷达扫描生成的距离图像上执行所有计算,避免了显式处理3D点云,并实现了每次扫描的快速杆状物提取,使用不同的激光雷达扫描设备、天气条件、路线和季节变化,在不同的数据集上测试所提出的杆状物提取和定位方法,实验结果表明,该方法在没有GPU的情况下在线运行时,优于其他最先进的方法。此外,我们向公众发布了我们的杆状物数据集,以评估杆状物提取器的性能,以及我们的实现方法。
主要贡献
本文的主要贡献是提出了一种基于深度图像的杆状物提取算法,用于自动驾驶系统的长期定位,与直接使用从3D激光雷达传感器获得的原始点云不同,该方法研究了如何使用深度图像进行杆状物提取,深度图像是旋转3D激光雷达(如Velodyne或Outster传感器)扫描的点云获取。在这样的图像上计算要比在原始3D点云上快得多。此外,深度图像在其二维结构中隐含了邻域信息,我们可以使用这些信息进行分割。
图1:深度图像和杆状物提取可视化,顶部是原始激光雷达扫描,此扫描生成的相应范围图像位于中间,底部是基于距离图像的杆状物提取结果。
如图1所示,在建图阶段,首先将原始点云投影到距离图像中,然后从该图像中提取杆状物,在获得深度图像中杆状物的位置后,使用机器人的地面真值姿势将其重新投影到全局坐标系中,以构建全局地图,在定位的过程中,这里利用蒙特卡罗定位(MCL)通过将在线传感器数据中检测到的杆状物与全局地图中的杆状物进行匹配来更新粒子的重要性权重,总之,文章提出了三个主要贡献:
(i) 在环境中提取比基线方法更可靠的杆状物,
(ii)在不同环境中实现更好的定位性能
(iii)在没有GPU的情况下在线运行。这些说法得到了论文和我们的实验评估的支持。该方法的源代码以及所有参数和杆状物数据集在:https://github.com/PRBonn/polelocalization.
总体介绍
在本文提出了一种基于深度图像的杆状物提取方法,用于使用三维激光雷达传感器进行长期定位。如图2所示,我们首先将激光雷达点云投影到深度图像中,并从中提取杆状物,然后基于提取的杆状物构建环境的全局杆状物地图。在定位阶段,使用相同的杆状物提取器在线提取标志物,并使用一种新的基于杆状物的观测模型进行蒙特卡罗定位。
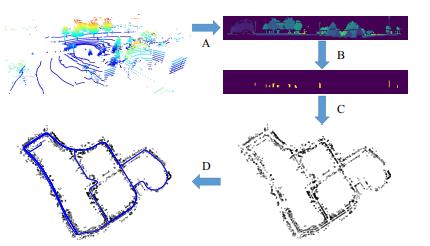
图2:该方法概述,A.将激光雷达点云投影到深度图像中,B.提取图像中的杆状物,C.基于提取的杆状物构建环境的2D全局杆状物地图,最后,提出了一种基于杆状物的MCL观测模型,用于在地图上定位机器人
A.深度图像生成
该方法的关键思想是使用激光雷达扫描数据生成的深度图像进行杆状物提取,我们利用球面投影生成距离图像。每个激光雷达点p=(x,y,z)通过映射到球坐标生成图像坐标,定义如下

B.杆状物提取
根据上一步生成的深度图像提取杆状物点云,提取算法背后的一般直觉是,杆状物点的范围值通常比背景小得多
1.我们的第一步是根据距离值将深度图像的像素分为不同的小区域,我们首先滤波方法从上到下,从左到右去除一些噪声。下一步是利用深度信息和每个像素的3D坐标几何约束从这些对象中提取杆状物中心点,提取杆状物中心点的位置和半径,其伪代码如下:
C.建图
为了构建用于定位的2D全局杆状物地图,将地面真值轨迹分割为长度相等的较短部分,由于所提供的姿势对于建图来说不是非常精确,因此我们只使用每个部分的中间激光雷达扫描数据来提取杆状物点,而不是聚集一个有噪声的子地图。通过对多个重叠杆状物点检测的中心和半径进行平均来合并它们,并应用计数模型来过滤掉动态对象,只有在连续段中多次出现的杆状物点才被视为真正的杆状物点。
D.蒙特卡罗定位
蒙特卡罗定位(MCL)通常使用粒子滤波器实现,MCL实现了一个估计概率密度p的递归贝叶斯滤波器,具体公式如下:

更具体的论述查看原文。
实验
这项工作的主要重点是一个精确和高效的杆状物点提取器,用于激光雷达的长期定位,实验证明我们的方法的能力。
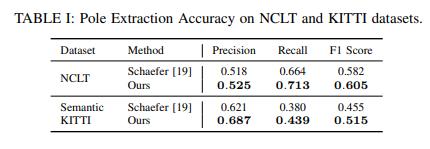
A.杆状物提取性能
第一个实验评估了我们方法的杆状物点提取性能,并支持基于深度图像的方法在杆状物点提取方面优于基线方法的说法。从表1可以看出我们的方法在两种环境下都具有更好的性能和提取更多杆状物点。
B.定位性能
第二个实验是为了支持我们的方法在不同环境下实现更高的定位精度,为了评估该方法的定位可靠性和准确性,我们使用了三个数据集进行评估,NCLT数据集、MulRan数据集和KITTI里程计数据集。
1) NCLT数据集的定位:其定位的误差对比如下:
2) MulRan数据集上的定位
3) KITTI数据集的定位
显示了KITTI数据集的定位结果,我们的方法始终比所有四种基线方法取得更好的性能
总结
在本文中,我们提出了一种新的基于深度图的杆状物点提取方法,用于在线长期激光雷达定位,我们的方法利用激光雷达扫描生成的深度图像,这使我们的方法能够快速处理点云数据并在线运行,在不同的数据集上实现并评估了我们的方法,实验表明,我们的方法可以准确地提取环境中更多的杆状物点,并在长期定位任务中获得更好的性能。此外,我们还发布了我们的实现代码和杆状物数据集,供其他研究人员评估他们的算法,在未来,我们计划探索其他功能的使用,如道路标记、路沿和交叉口功能,以提高我们方法的稳健性。
资源
三维点云论文及相关应用分享
【点云论文速读】基于激光雷达的里程计及3D点云地图中的定位方法
3D-MiniNet: 从点云中学习2D表示以实现快速有效的3D LIDAR语义分割(2020)
PCL中outofcore模块---基于核外八叉树的大规模点云的显示
更多文章可查看:点云学习历史文章大汇总
SLAM及AR相关分享
以上是关于基于激光雷达的深度图杆状物提取器在城市环境中长期定位方法的主要内容,如果未能解决你的问题,请参考以下文章