OpenCV 例程 300篇239. Harris 角点检测之精确定位(cornerSubPix)
Posted YouCans
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了OpenCV 例程 300篇239. Harris 角点检测之精确定位(cornerSubPix)相关的知识,希望对你有一定的参考价值。
『youcans 的 OpenCV 例程300篇 - 总目录』
【youcans 的 OpenCV 例程 300篇】239. Harris 角点检测之精确定位(cornerSubPix)
角是直线方向的快速变化。角点通常被定义为两条边的交点,或者说角点的邻域应该具有两个不同区域的不同方向的边界。
角是高度有效的特征。角点检测(Corner Detection)广泛应用于运动检测、图像匹配、视频跟踪、三维重建和目标识别。
6.2 OpenCV 中的 Harris 角检测器
OpenCV 中提供了 Harris 角点检测函数 cv.cornerHarris()。
函数说明:
cv.cornerHarris(src, blockSize, ksize, k[, dst=None, borderType=BORDER_DEFAULT] ) → dst
函数 cv.cornerHarris 运行 Harris 角检测器。
对于每个像素 (x,y) 计算梯度协方差矩阵
M
(
x
,
y
)
M(x,y)
M(x,y)。然后计算特征:
d
s
t
(
x
,
y
)
=
d
e
t
M
(
x
,
y
)
−
k
⋅
(
t
r
M
(
x
,
y
)
)
2
dst(x,y) = det M^(x,y) - k \\cdot (tr M^(x,y))^2
dst(x,y)=detM(x,y)−k⋅(trM(x,y))2
则角点在特征响应图像中是局部极大值。 实践中定义当 R 大于设定阈值,且为局部最大值的点为角点 。
参数说明:
- src:输入图像,单通道的 8位图像或浮点数图像
- dst:输出图像,Harris 检测器的响应,大小与 src 相同,格式为 CV_32FC1
- blockSize:邻域尺寸
- ksize:Sobel 算子的孔径参数
- k:Harris 检测器调节参数,通常取 0.04~0.06
- borderType:边界扩充类型
- cv.BORDER_CONSTANT
- cv.BORDER_REPLICATE
- cv.BORDER_REFLECT
- cv.BORDER_REFLECT_101
- cv.BORDER_TRANSPARENT
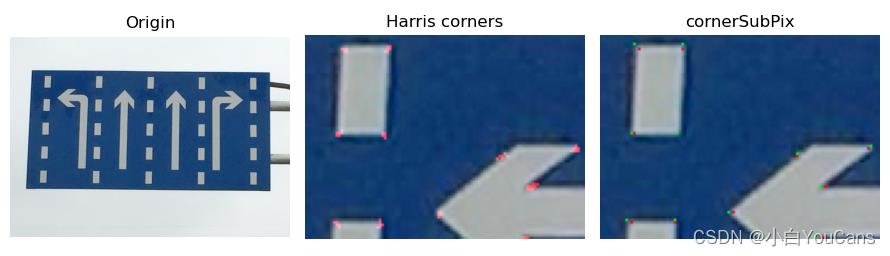
例程 14.20:Harris 角点检测之精确定位(cornerSubPix)
OpenCV 提供了函数 cv.cornerSubPix() 用于细化角点位置,细化了以亚像素精度检测到的角点位置。
cv.cornerSubPix(image, corners, winSize, zeroZone, criteria[, ]) → corners
函数 cv.cornerSubPix 用于细化角点位置。该算法通过将角的质心设为新的中心,迭代计算以获得角点或径向鞍点的亚像素精确位置。
参数说明:
- image:输入图像,单通道的 8位图像或浮点数图像
- corners:实数,输入时为角点初始坐标,输出时为角点的精细坐标
- winSize:搜索窗口边长的一半,如 winSize = Size(5,5) 表示搜索窗口为 11*11
- zeroZone:搜索区域中间死区大小的一半,(-1,-1) 表示不存在死区
- criteria:迭代过程终止的判据,迭代次数达到设定值 maxCount 或角点位移小于设定阈值 epsilon
注意事项:
- 输入输出参数 corners 的格式必须转化实数,不是整数。
- 函数 cv.cornerSubPix() 用于细化角点位置,不仅可以用于对 Harris 角点检测结果进行细化检测,也可以用于对其它角点检测结果进行细化检测。
# 14.20 Harris 角点检测之精确定位 (cornerSubPix)
img = cv2.imread("../images/sign01.png", flags=1)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # (600, 540)
print(img.shape) # (600, 836, 3)
# 角点检测
gray = np.float32(gray) # uint8,float32 都支持
dst = cv2.cornerHarris(gray, 2, 3, 0.04) # Harris 角点检测
_, dst = cv2.threshold(dst, 0.01 * dst.max(), 255, 0) # 提取角点
dst = np.uint8(dst) # (600, 836)
# 角点检测结果图像
imgCorner = np.copy(img)
imgCorner[:,:,2] = cv2.bitwise_or(imgCorner[:,:,2], dst) # 筛选角点,红色标记
# 对检测角点进行精细定位
ret, labels, stats, centroids = cv2.connectedComponentsWithStats(dst) # 检测连通区域
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 100, 0.001) # 终止判据
fineCorners = cv2.cornerSubPix(gray, np.float32(centroids), (5,5), (-1,-1), criteria) # (144, 2)
# 精细定位检测图像
imgFineCorners = np.copy(img)
centroids = centroids.astype(np.int) # 连通区域的质心 (x,y)
fineCorners = fineCorners.astype(np.int) # 精细定位的角点 (x,y)
imgFineCorners[centroids[:, 1], centroids[:, 0]] = [0,255,0] # Harris 检测位置,绿色
imgFineCorners[fineCorners[:, 1], fineCorners[:, 0]] = [0,0,255] # 精细检测位置,红色
plt.figure(figsize=(9, 6))
plt.subplot(131), plt.axis('off'), plt.title("Origin")
plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))
plt.subplot(132), plt.axis('off'), plt.title("Harris corners")
plt.imshow(cv2.cvtColor(imgCorner[115:195, 90:200], cv2.COLOR_BGR2RGB))
plt.subplot(133), plt.axis('off'), plt.title("cornerSubPix")
plt.imshow(cv2.cvtColor(imgFineCorners[115:195, 90:200], cv2.COLOR_BGR2RGB))
plt.tight_layout()
plt.show()
【本节完】
版权声明:
youcans@xupt 原创作品,转载必须标注原文链接:(https://blog.csdn.net/youcans/article/details/125821029)
Copyright 2022 youcans, XUPT
Crated:2022-7-15238. OpenCV 中的 Harris 角点检测
239. Harris 角点检测之精确定位(cornerSubPix)
240. OpenCV 中的 Shi-Tomas 角点检测
以上是关于OpenCV 例程 300篇239. Harris 角点检测之精确定位(cornerSubPix)的主要内容,如果未能解决你的问题,请参考以下文章
OpenCV 例程300篇238. OpenCV 中的 Harris 角点检测
OpenCV 例程300篇238. OpenCV 中的 Harris 角点检测
OpenCV 例程 300篇254.OpenCV 绘制图像标记
OpenCV 例程 300篇255.OpenCV 实现图像拼接