ROS2之ESP32简单速度消息测试(极限频率)
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS2之ESP32简单速度消息测试(极限频率)相关的知识,希望对你有一定的参考价值。
视频:
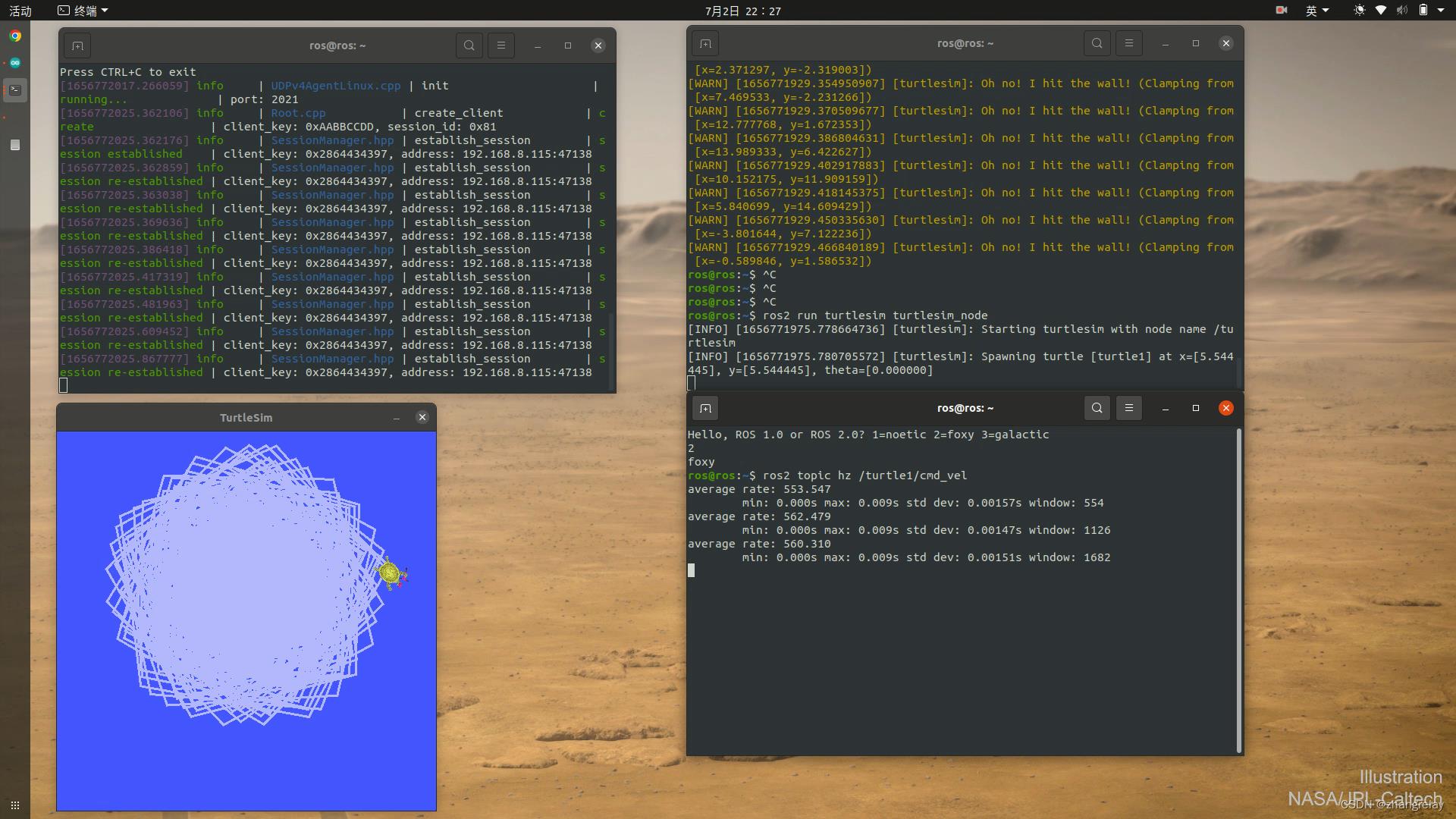
turtlesim_esp32发布速度测试
使用如下代码,测试:
#include <ros2arduino.h>
#include <WiFi.h>
#include <WiFiUdp.h>
#define SSID "***"
#define SSID_PW "***"
#define AGENT_IP "***"
#define AGENT_PORT *** //AGENT port number
#define PUBLISH_FREQUENCY 5000 //hz
void publishVel(geometry_msgs::Twist* vel, void* arg)
(void)(arg);
static int cnt = 0;
vel->linear.x = 0.1+0.01*cnt; //线速度
vel->angular.z = 0.1+0.01*cnt; //角速度
// vel->linear.x = ((double)rand()/(RAND_MAX)); //随机线速度
// vel->angular.z = ((double)rand()/(RAND_MAX)); //随机角速度
// vel->linear.x = 0.2; //固定线速度
// vel->angular.z = 1.0 - 0.001*cnt; //变化角速度
cnt++;
class VelPub : public ros2::Node
public:
VelPub()
: Node("esp32_cmdvel")
ros2::Publisher<geometry_msgs::Twist>* publisher_ = this->createPublisher<geometry_msgs::Twist>("turtle1/cmd_vel");
this->createWallFreq(PUBLISH_FREQUENCY, (ros2::CallbackFunc)publishVel, nullptr, publisher_);
;
WiFiUDP udp;
void setup()
WiFi.begin(SSID, SSID_PW);
while(WiFi.status() != WL_CONNECTED);
ros2::init(&udp, AGENT_IP, AGENT_PORT);
void loop()
static VelPub VelNode;
ros2::spin(&VelNode);
效果如下:
ros@ros:~$ ros2 topic -h
usage: ros2 topic [-h] [--include-hidden-topics]
Call `ros2 topic <command> -h` for more detailed usage. ...
Various topic related sub-commands
optional arguments:
-h, --help show this help message and exit
--include-hidden-topics
Consider hidden topics as well
Commands:
bw Display bandwidth used by topic
delay Display delay of topic from timestamp in header
echo Output messages from a topic
find Output a list of available topics of a given type
hz Print the average publishing rate to screen
info Print information about a topic
list Output a list of available topics
pub Publish a message to a topic
type Print a topic's type
Call `ros2 topic <command> -h` for more detailed usage.
ros@ros:~$ ros2 主题 -h
用法:ros2 topic [-h] [--include-hidden-topics]
调用 `ros2 topic <command> -h` 以获得更详细的用法。 ...各种主题相关的子命令
可选参数:
-h, --help 显示此帮助信息并退出
--include-hidden-topics
也考虑隐藏的主题命令:
bw 显示主题使用的带宽
delay 从标题中的时间戳显示主题的延迟
echo 从一个主题输出消息
find 输出给定类型的可用主题列表
hz 将平均发布率打印到屏幕
info 打印有关主题的信息
list 输出可用主题的列表
pub 向主题发布消息
type 打印主题的类型调用 `ros2 topic <command> -h` 以获得更详细的用法。
ros@ros:~$ ros2 topic hz -h
usage: ros2 topic hz [-h] [--window WINDOW] [--filter EXPR] [--wall-time]
topic_name
Print the average publishing rate to screen
positional arguments:
topic_name Name of the ROS topic to listen to (e.g. '/chatter')
optional arguments:
-h, --help show this help message and exit
--window WINDOW, -w WINDOW
window size, in # of messages, for calculating rate
(default: 10000)
--filter EXPR only measure messages matching the specified Python
expression
--wall-time calculates rate using wall time which can be helpful
when clock is not published during simulation
ros@ros:~$
ros@ros:~$ ros2 主题 hz -h
用法:ros2 topic hz [-h] [--window WINDOW] [--filter EXPR] [--wall-time]
主题名称将平均发布率打印到屏幕上
位置参数:
topic_name 要收听的 ROS 主题的名称(例如 '/chatter')可选参数:
-h, --help 显示此帮助信息并退出
--window 窗口,-w 窗口
窗口大小,以消息数为单位,用于计算速率
(默认值:10000)
--filter EXPR 只测量匹配指定 Python 的消息
表达
--wall-time 使用 wall time 计算速率,这很有帮助
在模拟期间未发布时钟时
ros@ros:~$
以上是关于ROS2之ESP32简单速度消息测试(极限频率)的主要内容,如果未能解决你的问题,请参考以下文章