利用Matlab对双目摄像头进行标定
Posted &奥克兰老爹ζ
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了利用Matlab对双目摄像头进行标定相关的知识,希望对你有一定的参考价值。
一、环境准备
Python=3.6
Matlab=2021b
一张棋盘图(A3、A4打印均可)如下图所示。
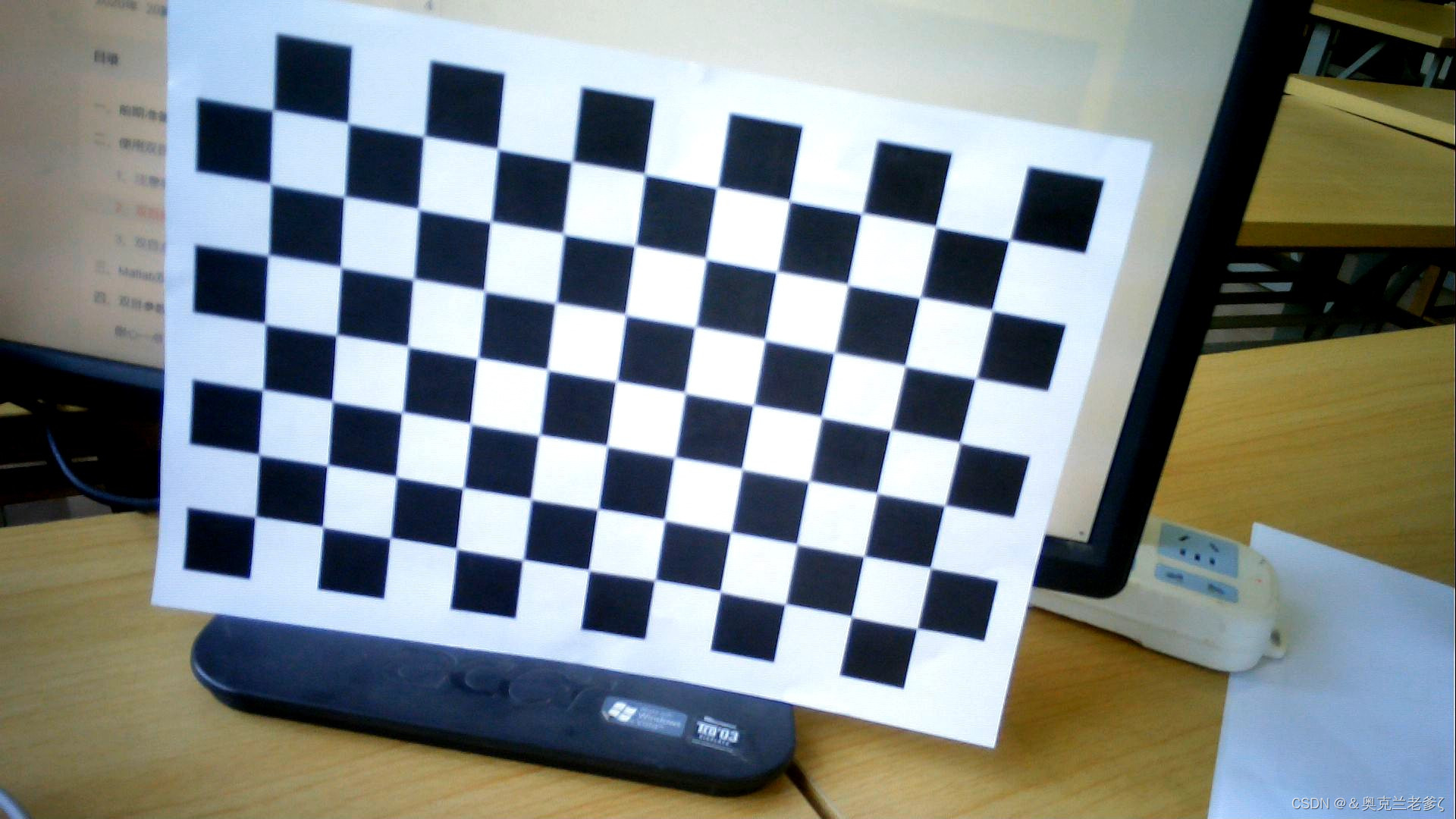
二、利用双目摄像头进行拍摄
注意应当拍摄40张左右照片(后期需要删除误差较大的图片),棋盘格可以左右旋转多次拍照。
如下图所示:

利用双目摄像头拍照后,需对照片进行左右分割,分割代码如下:
import numpy as np
import cv2
for i in range(0, 23):
# imgT = cv2.imdecode(np.fromfile('./images/%d.bmp' %i ,dtype=np.uint8), -1)
imgT = cv2.imdecode(np.fromfile('E:\\\\zhaopian\\\\%d.bmp' % i, dtype=np.uint8), -1) # 读取拍摄的左右双目照片
# cv2.imshow("zuo", img1[300:1200, 500:2000])
# cv2.imshow("you", img2[300:1200, 500:2000])
# cv2.waitKey(0)
# 设置左右照片的存储位置
cv2.imwrite("E:\\\\zhaopian\\\\you%d.bmp" % i, imgT[0:720, 0:1280])
cv2.imwrite("E:\\\\zhaopian\\\\zuo%d.bmp" % i, imgT[0:720, 1280:2560])
print("Resize images%d Fnished!" % i)
print("已经全部分割")
注意代码中拍摄的图片保存的格式应该为bmp,而不是jpg。代码中图片保存路径均可根据自己实际需要进行修改。
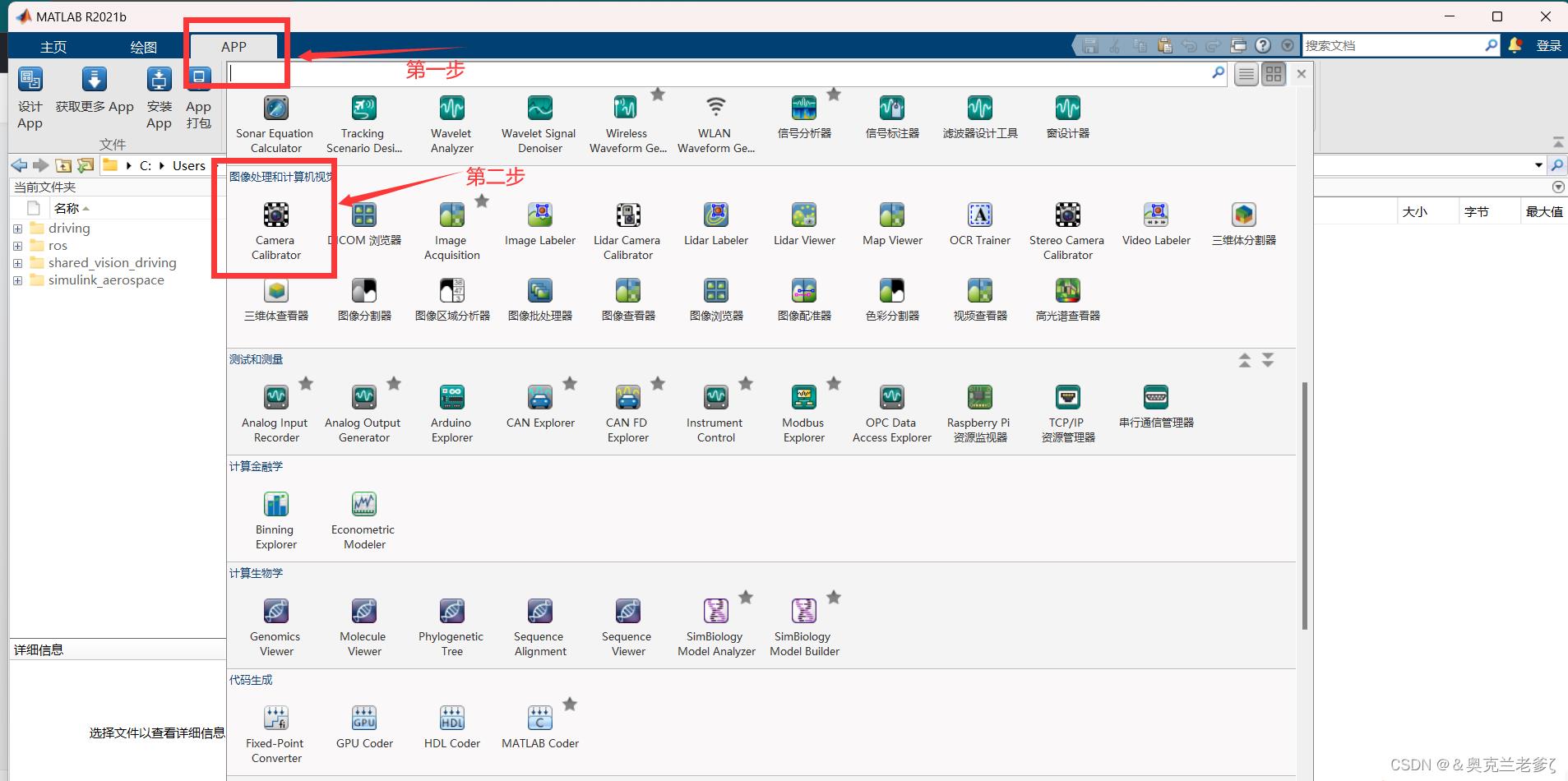
三、利用Matlab进行双目参数标定
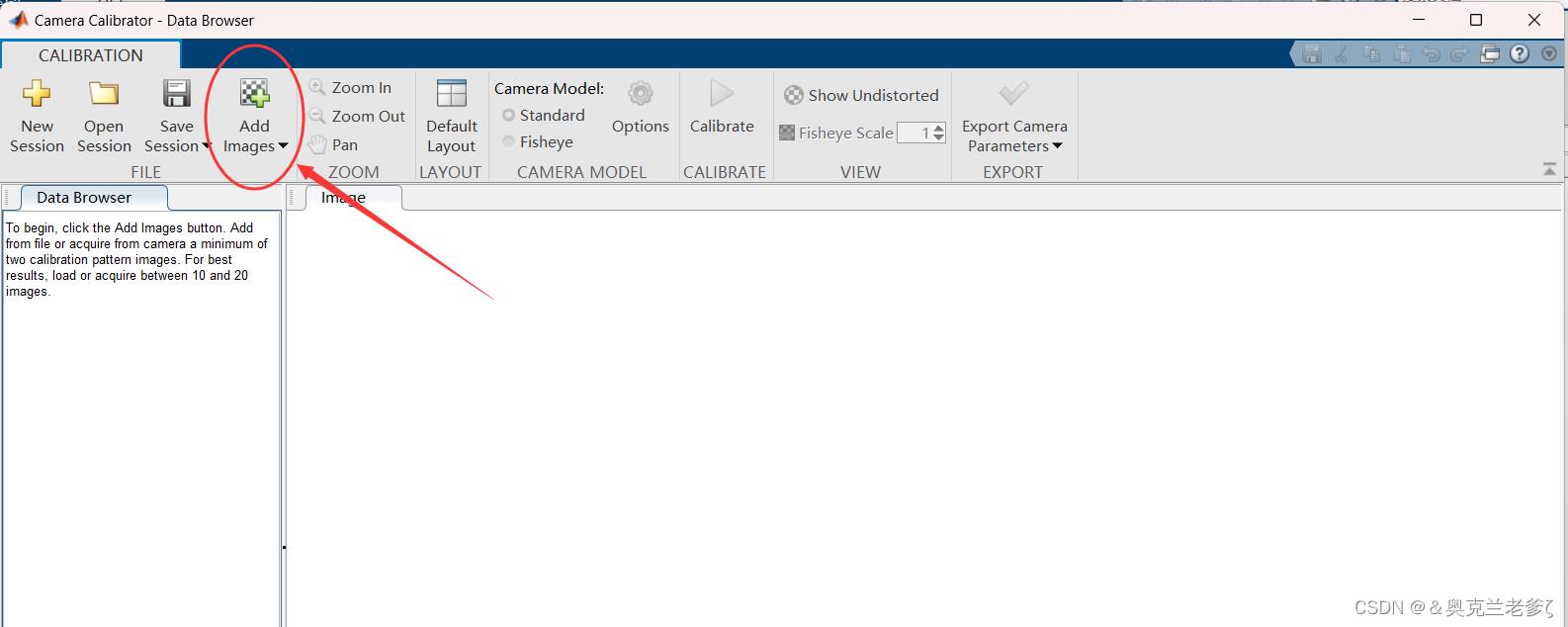
打开Matlab后,点app,找到Camera Calibrator,如图所示。
打开后如图所示。
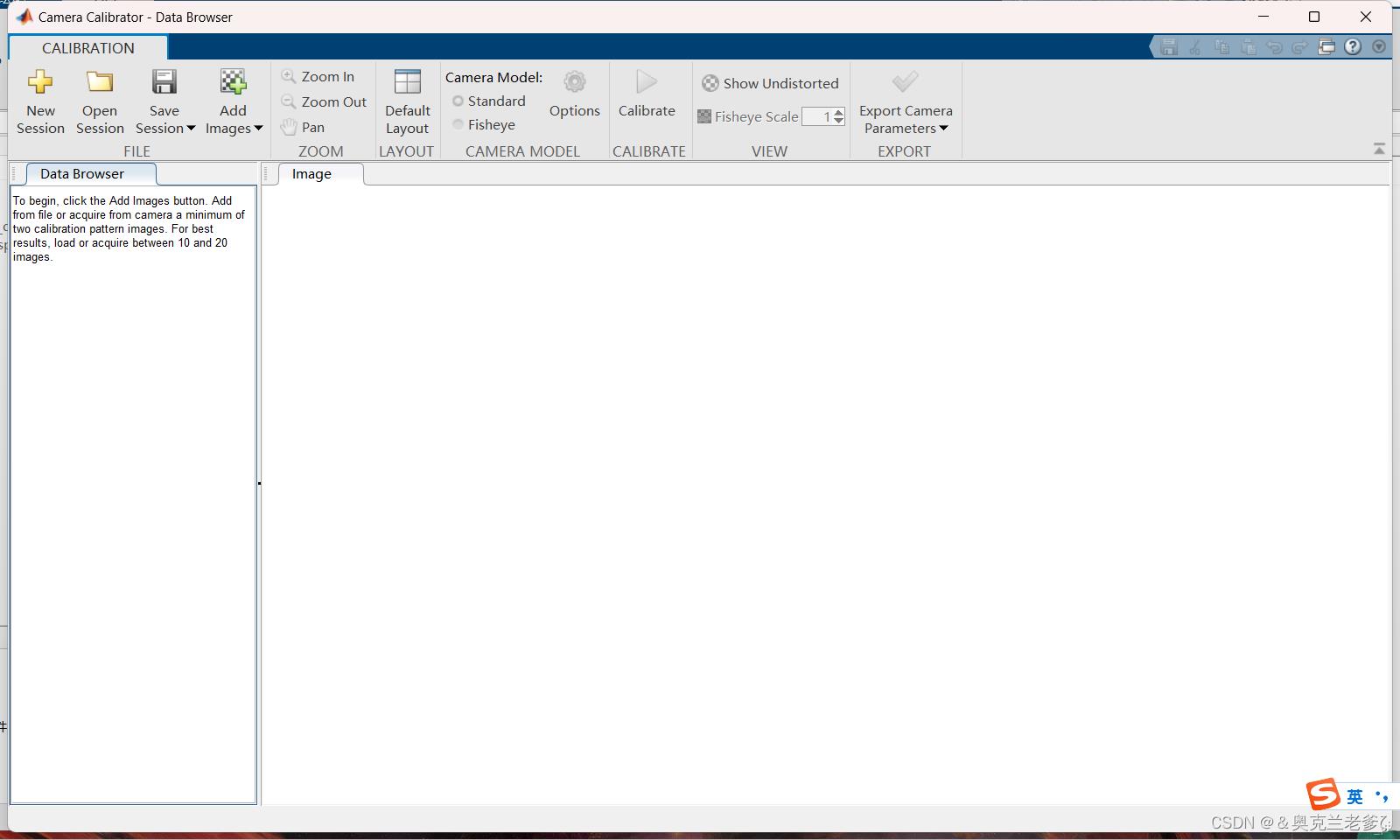
接下来导入图片。
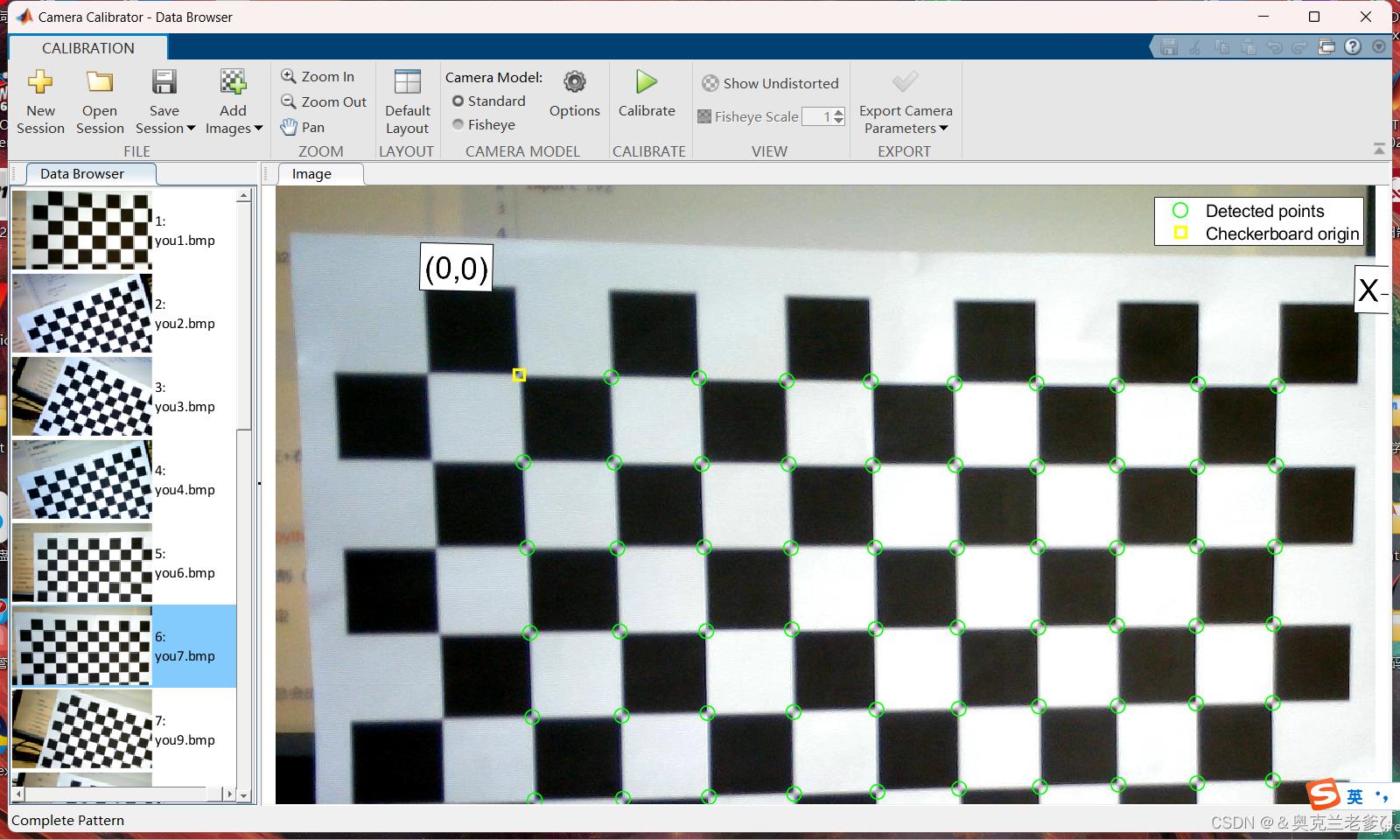
选择图片保存的文件夹。

接下来便进入下面这个页面。

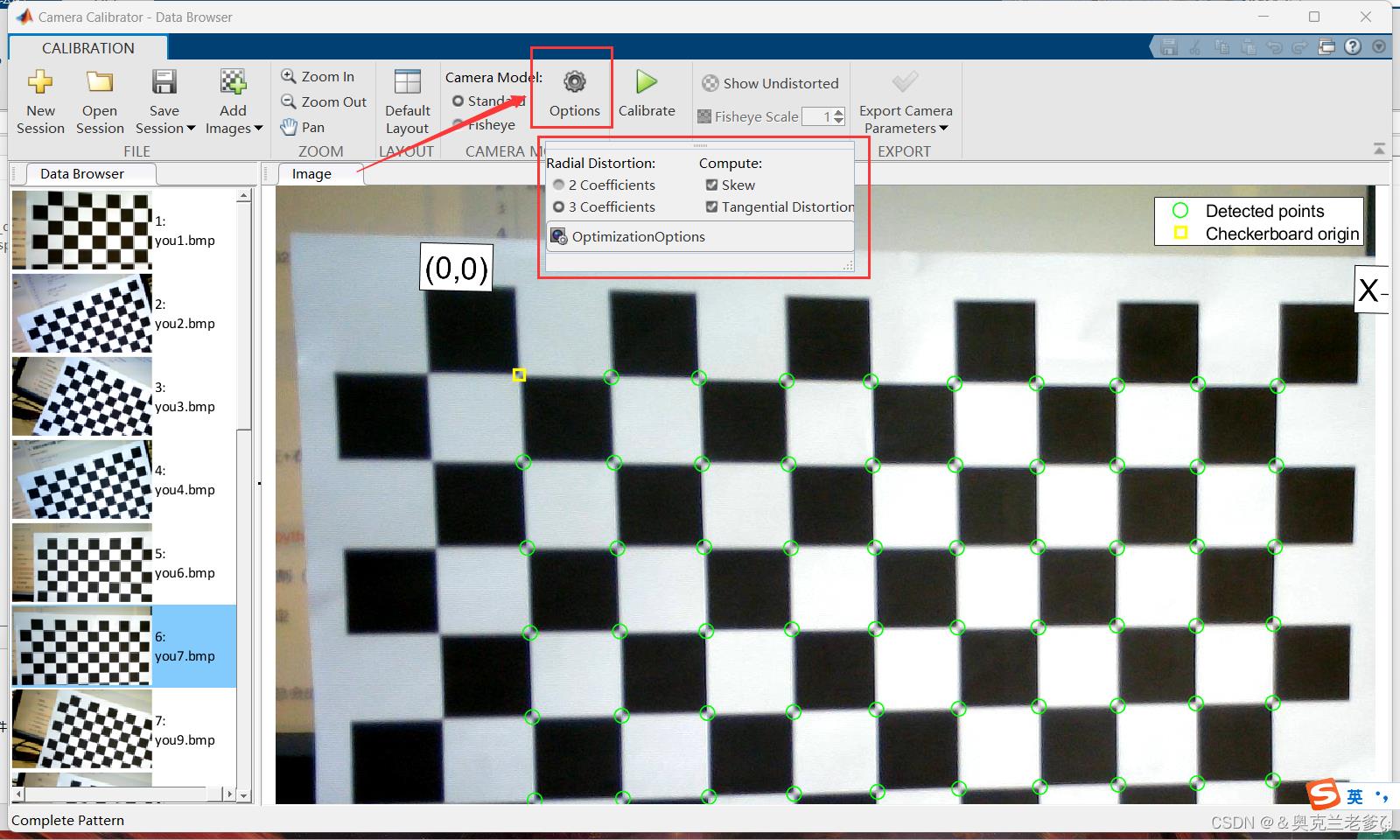
设置双目相机的定标参数,如图所示。
接下来便可以点击Calibrate开始进行标定了(我这里只取部分图片作为示例)。

我们需要删除这些误差较大的数据,如下图所示。
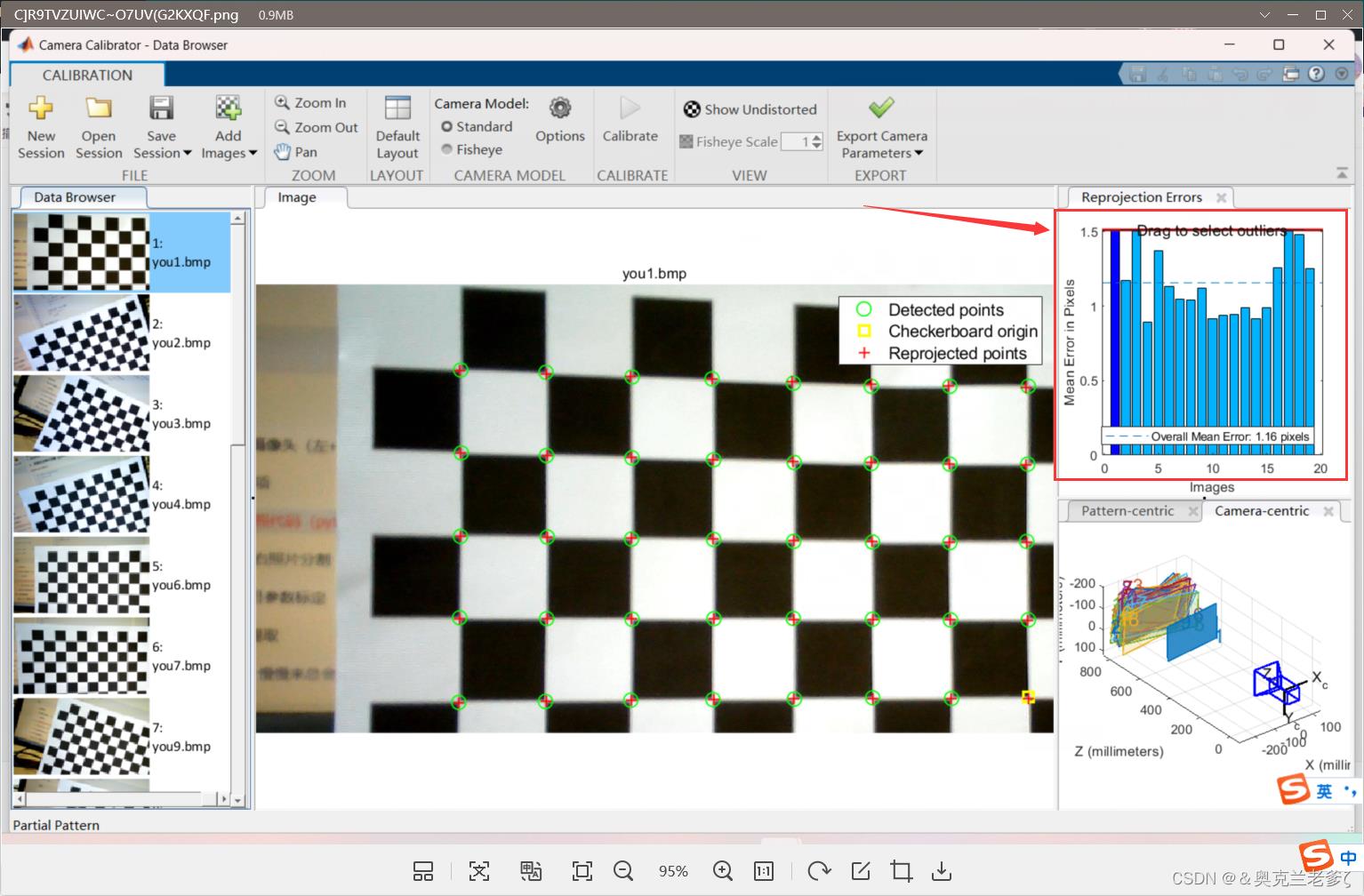
最后点击右上方的“√” 即可以回到Matlab主页面查看自己双目摄像头的各个参数了。
以上是关于利用Matlab对双目摄像头进行标定的主要内容,如果未能解决你的问题,请参考以下文章