ESP32使用freeRTOS的消息队列
Posted Wireless_Link
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ESP32使用freeRTOS的消息队列相关的知识,希望对你有一定的参考价值。
零. 声明
本专栏文章我们会以连载的方式持续更新,本专栏计划更新内容如下:
第一篇:ESP-IDF基本介绍,主要会涉及模组,芯片,开发板的介绍,环境搭建,程序编译下载,启动流程等一些基本的操作,让你对ESP-IDF开发有一个总体的认识,比我们后续学习打下基础!
第二篇:ESP32-IDF外设驱动介绍,主要会根据esp-idf现有的driver,提供各个外设的驱动,比如LED,OLED,SPI LCD,TOUCH,红外,Codec ic等等,在这一篇中,我们不仅仅来做外设驱动,还会对常用的外设总线做一个介绍,让大家知其然又知其所以然!
第三篇:目前比较火热的GUI LVGL介绍,主要会设计LVGL7.1,LVGL8的移植介绍,并且也会介绍各个组件,知道原理后,最后,我们会推出一款组态软件来构建我们的GUI,来提升我们的效率!
第四篇:ESP32-蓝牙,熟悉我的,应该都知道,我即使从事蓝牙协议栈的开发的,所以这个是我们独有的优势,在这一篇章,我们会提供不仅仅是蓝牙应用方法的知识,也会应用结合蓝牙底层协议栈的理论,让你彻底从上到下打通蓝牙任督二脉!
第五篇:Wi-Fi介绍,熟悉我的,应该也知道,我们也做过一款sdio wifi的驱动教程板子,所以在wifi这方面我们也是有独有的优势,在这一篇章,我们同样不仅仅提供Wi-Fi应用方面的知识,也会结合底层理论,让你对Wi-Fi有一个清晰的认知!
另外,我们的教程包括但是不局限于以上篇章,为了给你一个更好的导航,以下信息尤其重要,请详细查看!!
------------------------------------------------------------------------------------------------------------------------------------------
蓝牙交流扣扣群:539357317
微信公众号↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓

------------------------------------------------------------------------------------------------------------------------------------------
一.消息队列的概念
队列又称消息队列,是一种常用于任务间通信的数据结构,队列可以在任务与任务间、中断和任务间传递信息,实现了任务接收来自其他任务或中断的不固定长度的消息,任务能够从队列里面读取消息,当队列中的消息是空时,读取消息的任务将被阻塞,用户还可以指定阻塞的任务时间 xTicksToWait,在这段时间中,如果队列为空,该任务将保持阻塞状态以等待队列数据有效。当队列中有新消息时,被阻塞的任务会被唤醒并处理新消息;当等待的时间超过了指定的阻塞时间,即使队列中尚无有效数据,任务也会自动从阻塞态转为就绪态。消息队列是一种异步的通信方式。通过消息队列服务,任务或中断服务例程可以将一条或多条消息放入消息队列中。同样,一个或多个任务可以从消息队列中获得消息。当有多个消息发送到消息队列时,通常是将先进入消息队列的消息先传给任务,也就是说,任务先得到的是最先进入消息队列的消息,即先进先出原则(FIFO),但是也支持后进先出原则(LIFO)。FreeRTOS 中使用队列数据结构实现任务异步通信工作,具有如下特性:
消息支持先进先出方式排队,支持异步读写工作方式。
读写队列均支持超时机制。
消息支持后进先出方式排队,往队首发送消息(LIFO)。
可以允许不同长度(不超过队列节点最大值)的任意类型消息。
一个任务能够从任意一个消息队列接收和发送消息。
多个任务能够从同一个消息队列接收和发送消息。
当队列使用结束后,可以通过删除队列函数进行删除。
二.消息队列的工作机制
创建消息队列时 FreeRTOS 会先给消息队列分配一块内存空间,这块内存的大小等于消息队列控制块大小加上(单个消息空间大小与消息队列长度的乘积),接着再初始化消息队列,此时消息队列为空。FreeRTOS 的消息队列控制块由多个元素组成,当消息队列被创建时,系统会为控制块分配对应的内存空间,用于保存消息队列的一些信息如消息的存储位置,头指针 pcHead、尾指针 pcTail、消息大小 uxItemSize 以及队列长度 uxLength 等。同时每个消息队列都与消息空间在同一段连续的内存空间中,在创建成功的时候,这些内存就被占用了,只有删除了消息队列的时候,这段内存才会被释放掉,创建成功的时候就已经分配好每个消息空间与消息队列的容量,无法更改,每个消息空间可以存放不大于消息大小 uxItemSize 的任意类型的数据,所有消息队列中的消息空间总数即是消息队列的长度,这个长度可在消息队列创建时指定。
任务或者中断服务程序都可以给消息队列发送消息,当发送消息时,如果队列未满或者允许覆盖入队,FreeRTOS 会将消息拷贝到消息队列队尾,否则,会根据用户指定的阻塞超时时间进行阻塞,在这段时间中,如果队列一直不允许入队,该任务将保持阻塞状态以等待队列允许入队。当其它任务从其等待的队列中读取入了数据(队列未满),该任务将自动由阻塞态转移为就绪态。当等待的时间超过了指定的阻塞时间,即使队列中还不允许入队,任务也会自动从阻塞态转移为就绪态,此时发送消息的任务或者中断程序会收到一个错误码 errQUEUE_FULL。
发送紧急消息的过程与发送消息几乎一样,唯一的不同是,当发送紧急消息时,发送的位置是消息队列队头而非队尾,这样,接收者就能够优先接收到紧急消息,从而及时进行消息处理。
当某个任务试图读一个队列时,其可以指定一个阻塞超时时间。在这段时间中,如果队列为空,该任务将保持阻塞状态以等待队列数据有效。当其它任务或中断服务程序往其等待的队列中写入了数据,该任务将自动由阻塞态转移为就绪态。当等待的时间超过了指定的阻塞时间,即使队列中尚无有效数据,任务也会自动从阻塞态转移为就绪态。
当消息队列不再被使用时,应该删除它以释放系统资源,一旦操作完成,消息队列将
被永久性的删除。
消息队列的运作过程具体见图:

三.消息队列的阻塞机制
很简单,因为 FreeRTOS 已经为我们做好了,我们直接使用就好了,每个对消息队列读写的函数,都有这种机制,我称之为阻塞机制。假设有一个任务 A 对某个队列进行读操作的时候(也就是我们所说的出队),发现它没有消息,那么此时任务 A 有 3 个选择:第一个选择,任务 A 扭头就走,既然队列没有消息,那我也不等了,干其它事情去,这样子任务 A 不会进入阻塞态;第二个选择,任务 A 还是在这里等等吧,可能过一会队列就有消息,此时任务 A 会进入阻塞状态,在等待着消息的道来,而任务 A 的等待时间就由我们自己定义,比如设置 1000 个系统时钟节拍 tick 的等待,在这 1000 个 tick 到来之前任务 A 都是处于阻塞态,当阻塞的这段时间任务 A 等到了队列的消息,那么任务 A 就会从阻塞态变成就绪态,如果此时任务 A 比当前运行的任务优先级还高,那么,任务 A 就会得到消息并且运行;假如 1000 个 tick 都过去了,队列还没消息,那任务 A 就不等了,从阻塞态中唤醒,返回一个没等到消息的错误代码,然后继续执行任务 A 的其他代码;第三个选择,任务 A 死等,不等到消息就不走了,这样子任务 A 就会进入阻塞态,直到完成读取队列的消息。
而在发送消息操作的时候,为了保护数据,当且仅当队列允许入队的时候,发送者才能成功发送消息;队列中无可用消息空间时,说明消息队列已满,此时,系统会根据用户指定的阻塞超时时间将任务阻塞,在指定的超时时间内如果还不能完成入队操作,发送消息的任务或者中断服务程序会收到一个错误码 errQUEUE_FULL,然后解除阻塞状态;当然,只有在任务中发送消息才允许进行阻塞状态,而在中断中发送消息不允许带有阻塞机制的,需要调用在中断中发送消息的 API 函数接口,因为发送消息的上下文环境是在中断中,不允许有阻塞的情况。
假如有多个任务阻塞在一个消息队列中,那么这些阻塞的任务将按照任务优先级进行排序,优先级高的任务将优先获得队列的访问权。
四.消息队列的常用函数
使用队列模块的典型流程如下:
创建消息队列。
写队列操作。
读队列操作。
删除队列。
1.消息队列创建函数 xQueueCreate()
xQueueCreate() 用于创建一个新的队列并返回可用于访问这个队列的队列句柄。队列句柄其实就是一个指向队列数据结构类型的指针。
队列就是一个数据结构,用于任务间的数据的传递。每创建一个新的队列都需要为其分配 RAM ,一部分用于存储队列的状态,剩下 的作为队列消息的存储区域 。使用xQueueCreate() 创建队列 时 , 使用的是动态内存分配,所以 要想使用该函数必须在FreeRTOSConfig.h 中把 configSUPPORT_DYNAMIC_ALLOCATION 定义为 1 来使能,这是个用于使能动态内存分配的宏,通常情况下,在 FreeRTOS 中,凡是创建任务,队列,信号量和互斥量等内核对象都需要使用动态内存分配,所以这个宏默认在 FreeRTOS.h 头文件中已经使能(即定义为 1)。如果想使用静态内存,则可以使用 xQueueCreateStatic() 函数来创建一个队列。使用静态创建消息队列函数创建队列时需要的形参更多,需要的内存由编译的时候预先分配好,一般很少使用这种方法。使用说明具体见表格

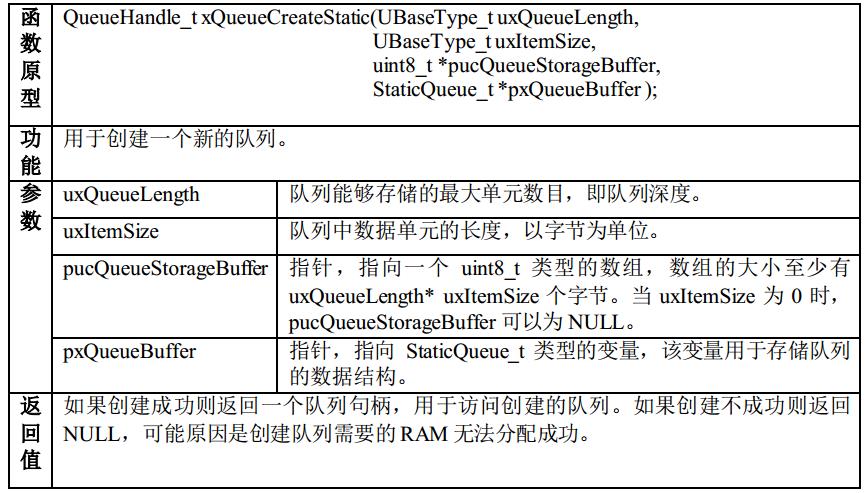
2.消息队列静态创建函数 xQueueCreateStatic()
xQueueCreateStatic()用于创建一个新的队列并返回可用于访问这个队列的队列句柄。队列句柄其实就是一个指向队列数据结构类型的指针。
队列就是一个数据结构,用于任务间的数据的传递。每创建一个新的队列都需要为其分配 RAM , 一 部 分 用 于 存 储 队 列 的 状 态 , 剩 下 的 作 为 队 列 的 存 储 区 。 使 用xQueueCreateStatic() 创建队列时,使用的是静态内存分配,所以要想使用该函数必须在FreeRTOSConfig.h 中把 configSUPPORT_STATIC_ALLOCATION 定义为 1 来使能。这是个用于使能静态内存分配的宏,需要的内存在程序编译的时候分配好,由用户自己定义,其实创建过程与 xQueueCreate()都是差不多的,我们暂不深入讲解
3.消息队列删除函数 vQueueDelete()
队列删除函数是根据消息队列句柄直接删除的,删除之后这个消息队列的所有信息都会被系统回收清空,而且不能再次使用这个消息队列了,但是需要注意的是,如果某个消息队列没有被创建,那也是无法被删除的,动脑子想想都知道,没创建的东西就不存在,怎么可能被删除。xQueue 是 vQueueDelete()函数的形参,是消息队列句柄,表示的是要删除哪个想队列。
4.向消息队列发送消息函数
任务或者中断服务程序都可以给消息队列发送消息,当发送消息时,如果队列未满或者允许覆盖入队,FreeRTOS 会将消息拷贝到消息队列队尾,否则,会根据用户指定的阻塞超时时间进行阻塞,在这段时间中,如果队列一直不允许入队,该任务将保持阻塞状态以等待队列允许入队。当其它任务从其等待的队列中读取入了数据(队列未满),该任务将自动由阻塞态转为就绪态。当任务等待的时间超过了指定的阻塞时间,即使队列中还不允许入队,任务也会自动从阻塞态转移为就绪态,此时发送消息的任务或者中断程序会收到
一个错误码 errQUEUE_FULL。
发送紧急消息的过程与发送消息几乎一样,唯一的不同是,当发送紧急消息时,发送的位置是消息队列队头而非队尾,这样,接收者就能够优先接收到紧急消息,从而及时进行消息处理。
其实消息队列发送函数有好几个,都是使用宏定义进行展开的,有些只能在任务调用,有些只能在中断中调用,具体见下面讲解。
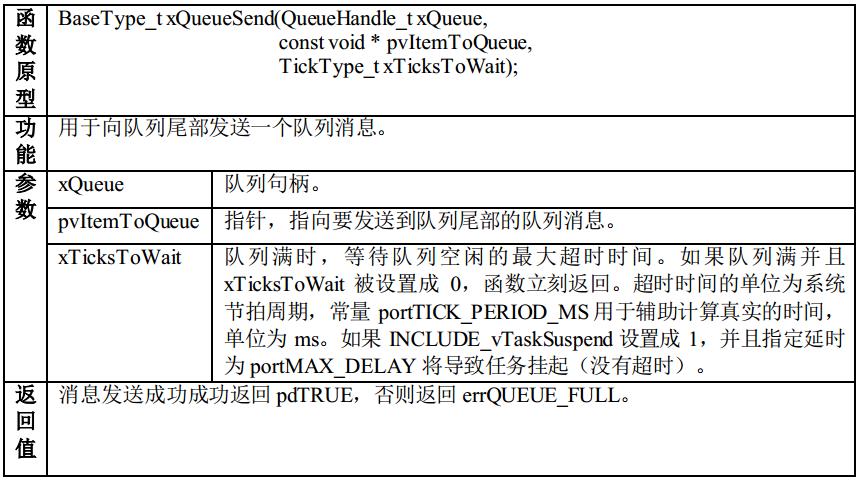
4.1 xQueueSend()与 xQueueSendToBack()
xQueueSend()用于向队列尾部发送一个队列消息。消息以拷贝的形式入队,而不是以引用的形式。该函数绝对不能在中断服务程序里面被调用,中断中必须使用带有中断保护功能的 xQueueSendFromISR()来代替。xQueueSend() 等 同 于xQueueSendToBack()
4.2 xQueueSendFromISR()与 xQueueSendToBackFromISR()
xQueueSendFromISR()是一个宏,宏展开是调用函数 xQueueGenericSendFromISR()。该宏是 xQueueSend()的中断保护版本,用于在中断服务程序中向队列尾部发送一个队列消息,等价于 xQueueSendToBackFromISR()

4.3 xQueueSendToFront()
xQueueSendToFron() 是 一个 宏, 宏 展 开 也 是 调 用 函数 xQueueGenericSend() 。xQueueSendToFront()用于向队列队首发送一个消息。消息以拷贝的形式入队,而不是以引用的形式。该函数绝不能在中断服务程序里面被调用,而是必须使用带有中断保护功能的
xQueueSendToFrontFromISR ()来代替

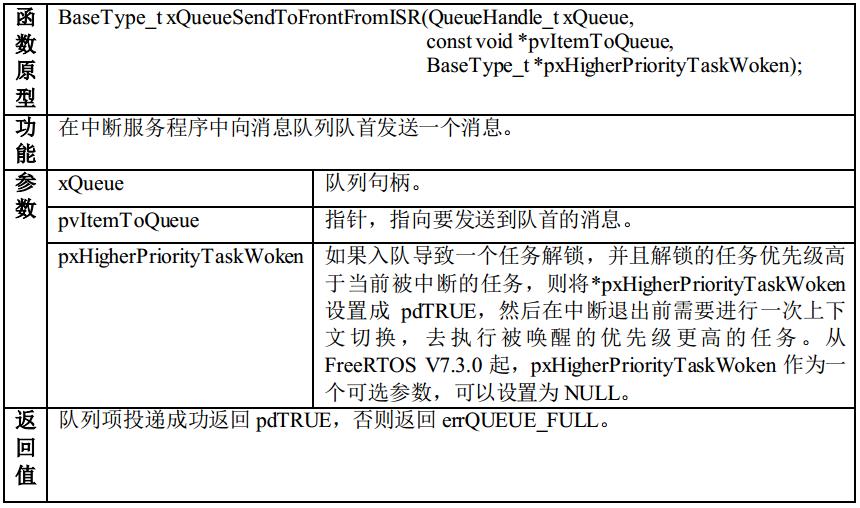
4.4 xQueueSendToFrontFromISR()
xQueueSendToFrontFromISR() 是 一 个 宏 , 宏 展 开 是 调 用 函数xQueueGenericSendFromISR()。该宏是 xQueueSend ToFront()的中断保护版本,用于在中断服务程序中向消息队列队首发送一个消息。
5.从消息队列读取消息函数
5.1 xQueueReceive()与 xQueuePeek()
xQueueReceive() 是 一个 宏, 宏 展 开 是 调 用 函数 xQueueGenericReceive() 。xQueueReceive()用于从一个队列中接收消息并把消息从队列中删除。接收的消息是以拷贝的形式进行的,所以我们必须提供一个足够大空间的缓冲区。具体能够拷贝多少数据到缓冲区,这个在队列创建的时候已经设定。该函数绝不能在中断服务程序里面被调用,而是必须使用带有中断保护功能的 xQueueReceiveFromISR () 来代替。

看到这里,有人就问了如果我接收了消息不想删除怎么办呢?其实,你能想到的东西,FreeRTOS 看到也想到了,如果不想删除消息的话,就调用 xQueuePeek ()函数。其实这个函数与 xQueueReceive()函数的实现方式一样,连使用方法都一样,只不过xQueuePeek()函数接收消息完毕不会删除消息队列中的消息而已
5.2 xQueueReceiveFromISR()与 xQueuePeekFromISR()
xQueueReceiveFromISR() 是 xQueueReceive ()的中断版本,用于在中断服务程序中接收一个队列消息并把消息从队列中删除;xQueuePeekFromISR()是 xQueuePeek()的中断版本,用于在中断中从一个队列中接收消息,但并不会把消息从队列中移除。说白了这两个函数只能用于中断,是不带有阻塞机制的,并且是在中断中可以安全调用。
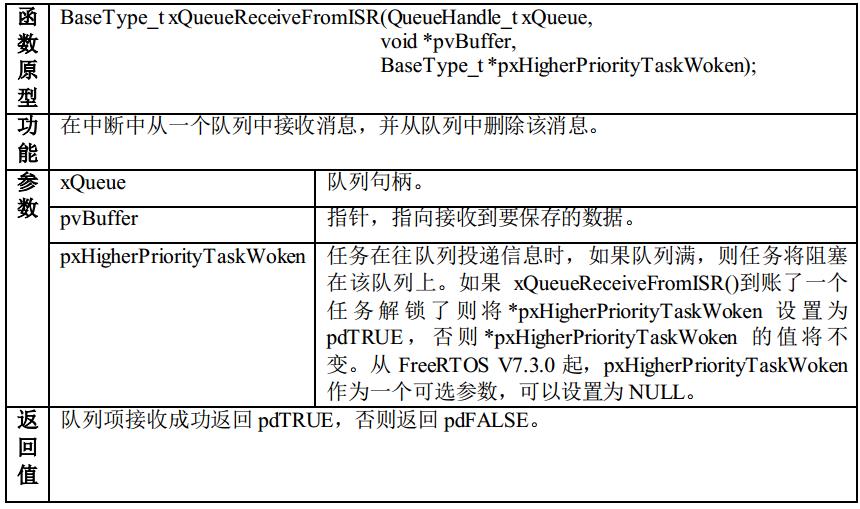
xQueuePeekFromISR跟xQueueReceiveFromISR作用一样,从中断中接收一个消息的,但是不会把消息从消息队列中删除。
五.消息队列的例子
1.代码
#include <stdio.h>
#include <string.h>
#include <stdint.h>
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "freertos/queue.h"
static QueueHandle_t message_queue;
typedef struct
uint8_t *q_data;
uint16_t q_data_len;
message_data_t;
void msg_queue_send_task(void *pvParameters)
printf("msg_queue_send_task\\n");
while(1)
uint8_t data_len = rand() % 256;
message_data_t message_data;
if(!data_len)
data_len = 1;
message_data.q_data_len = data_len;
message_data.q_data = malloc(data_len);
if (message_data.q_data == NULL)
printf("Malloc q_data_len failed!");
return;
printf("message data len = %d\\n",data_len);
memset(message_data.q_data,data_len,data_len);
if (xQueueSend(message_queue, (void *)&message_data, ( TickType_t ) 0) != pdTRUE)
printf("Failed to enqueue message_queue. Queue full.");
/* If data sent successfully, then free the pointer in `xQueueReceive'
* after processing it. Or else if enqueue in not successful, free it
* here. */
free(message_data.q_data);
vTaskDelay(1000 / portTICK_RATE_MS);
void app_main(void)
message_data_t message_data;
message_queue = xQueueCreate(15, sizeof(message_data_t));
if (message_queue == NULL)
printf("Queue creation failed\\n");
return;
xTaskCreate(&msg_queue_send_task, "msg_queue_send_task", 2048, NULL, 6, NULL);
while(1)
if (xQueueReceive(message_queue, &message_data, portMAX_DELAY) != pdPASS)
printf("Queue receive error");
else
printf("message_data len:%d\\n",message_data.q_data_len);
printf("message_data[0]=%d message_data[%d]=%d\\n",message_data.q_data[0],
message_data.q_data_len-1,message_data.q_data[message_data.q_data_len-1]);
free(message_data.q_data);
整份代码看懂了API的使用是超级简单的,就是创建一个task,然后在task中每隔1s往消息队列中塞一个数据,塞得数据是这样子,数据的长度是随机1~255,然后buffer中所有的数据等于长度,然后主循环中一直接收数据,并打印出来
参考内容:野火FreeRTOS内核实现与应用实战
以上是关于ESP32使用freeRTOS的消息队列的主要内容,如果未能解决你的问题,请参考以下文章