LabVIEW控制Arduino实现舵机联控(基础篇—9)
Posted 不脱发的程序猿
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了LabVIEW控制Arduino实现舵机联控(基础篇—9)相关的知识,希望对你有一定的参考价值。
目录
本篇博文将通过LabVIEW和Arduino Uno控制板实现对单个和多个舵机转动角度的控制。
1、控制单个舵机
1.1、实验目的
利用LIAT函数库通过LabVIEW和Arduino Uno控制板实现对单个舵机转动角度的控制。
1.2、实验环境
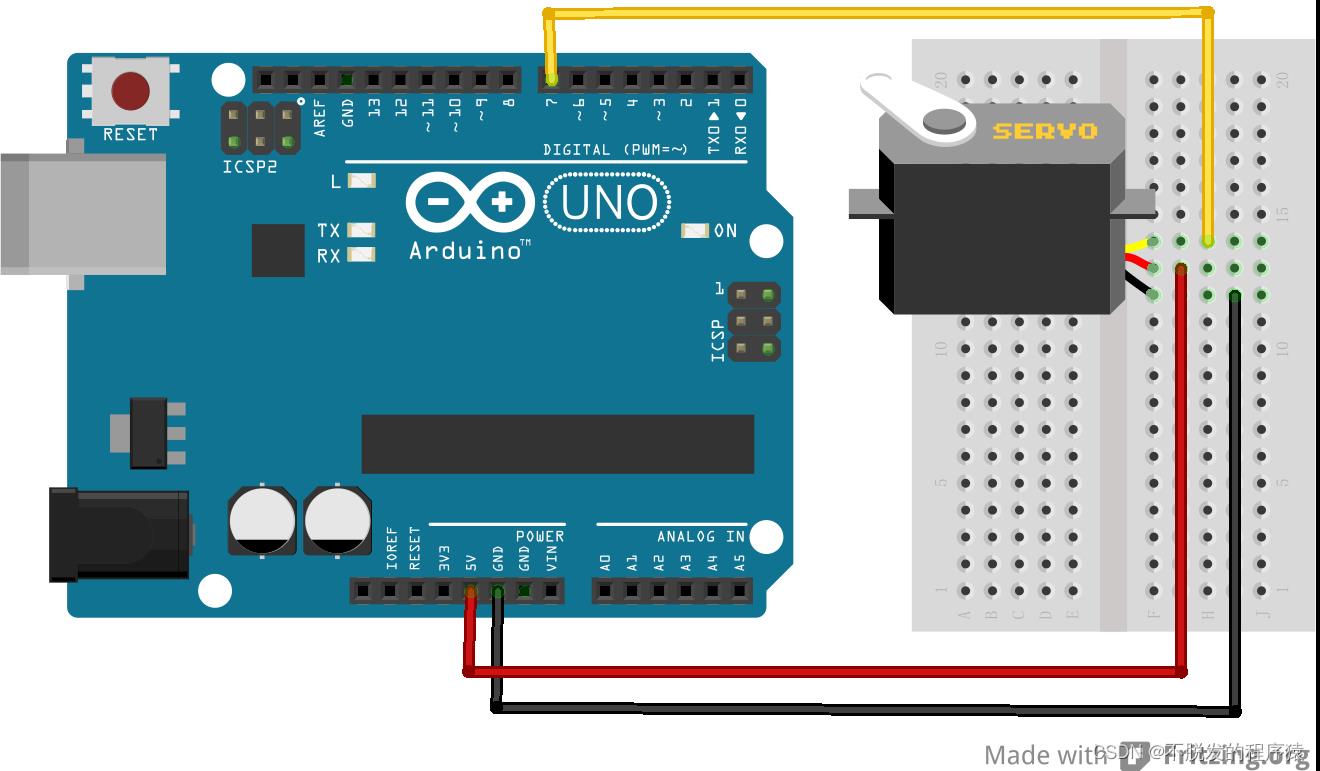
将9g舵机的电源线分别接至Arduino Uno控制板上的5V和GND引脚上,信号线接至数字引脚D2上,如下图所示:
1.3、程序设计
本例修改自LabVIEW lnterface for Arduino函数库中的示例,位于函数选板“函数”→"Arduino"→"Example" "Servo Example",修改后的LabVIEW前面板如下图所示:

程序框图如下图所示:
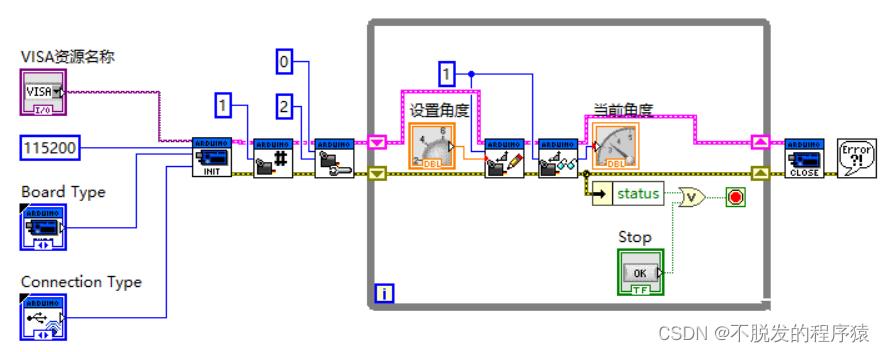
LabVIEW程序首先通过设置的串口号与Arduino Uno控制板建立连接,然后调用Servo函数库中的Set Number of Servo和Configure Servo函数节点以设置舵机的数目为1和舵机的连接引脚,接着进入While循环并不断调用Servo Write Angle和Servo Read Angle函数节点先向舵机写入转动的角度值,并读取舵机当前的角度值。最后,断开与Arduino Uno控制板的连接。
1.4、实验演示
点击运行按钮,LabVIEW程序开始执行,通过调节设置角度的旋钮,可以看到舵机随着角度的改变而转动,同时,当前角度值也随着舵机的转动而实时改变。
资源下载:LabVIEW控制Arduino实现舵机联控-单片机文档类资源-CSDN下载
2、控制多个舵机
2.1、实验目的
利用LIAT函数库通过LabVIEW和Arduino Uno控制板实现对多个舵机转动角度的控制。
2.2、实验环境
实验环境和控制单个舵机方法类似,将两个9g舵机的电源线分别接至Arduino Uno控制板上的5V和GND引脚上,信号线分别接至数字引脚D2和D3上。
2.3、程序设计
本例修改自LabVIEW Ilnterface for Arduino函数库中的示例,位于函数选板“函数”→"Arduino"→"Example"→"Servo Example",修改后的LabVIEW前面板如下图所示:

程序框图如下图所示:
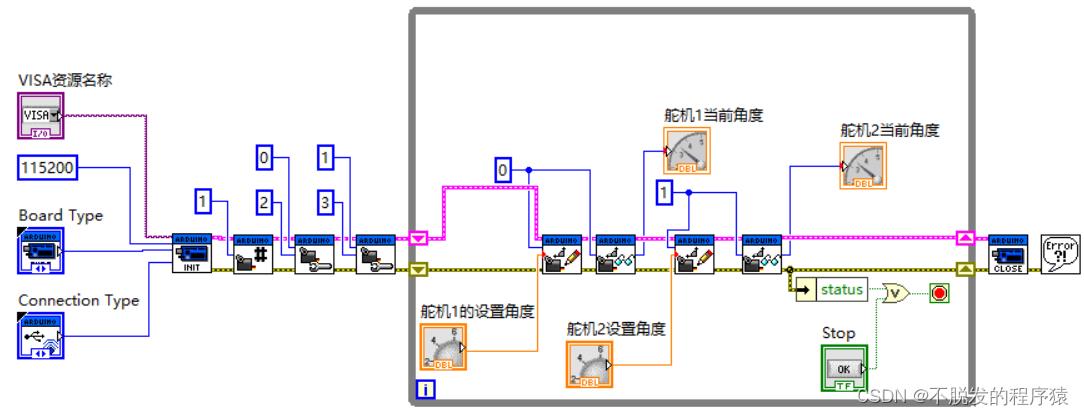
LabVIEW程序首先通过设置的串口号与Arduino Uno控制板建立连接,然后调用Servo函数库中的Set Number of Servo和Configure Servo函数节点以设置舵机的数目为2和每个舵机所连接的引脚,接着进入While循环并不断调用Servo Write Angle和Servo Read Angle函数节点向指定舵机写入转动的角度值,并读取出指定舵机当前的角度值。最后,断开与Arduino Uno控制板的连接。
2.4、实验演示
点击运行按钮,LabVIEW程序开始执行,通过舵机1和舵机2的调节设置角度旋钮,可以看到舵机1和舵机2随着角度的改变而转动,同时,舵机1和舵机2的当前角度值也随着舵机1和舵机2的转动而实时改变。
资源下载:LabVIEW控制Arduino实现舵机联控-单片机文档类资源-CSDN下载
以上是关于LabVIEW控制Arduino实现舵机联控(基础篇—9)的主要内容,如果未能解决你的问题,请参考以下文章
LabVIEW LINX Toolkit控制Arduino设备(拓展篇—1)
LabVIEW LINX Toolkit控制Arduino设备(拓展篇—1)
LabVIEW控制Arduino实现PWM呼吸灯(基础篇—5)