EM+GMM基于EM和GMM算法的目标轨迹跟踪和异常行为识别matlab仿真
Posted fpga和matlab
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了EM+GMM基于EM和GMM算法的目标轨迹跟踪和异常行为识别matlab仿真相关的知识,希望对你有一定的参考价值。
1.软件版本
matlab2013b
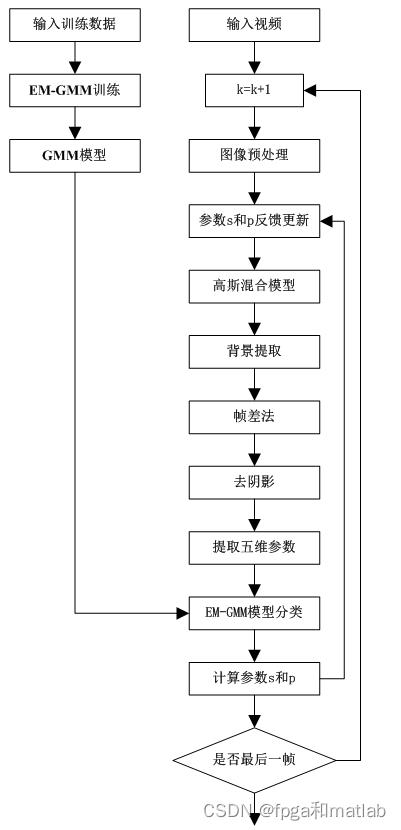
2.系统概述
3.部分源码
clc;
clear;
close all;
warning off;
addpath 'func\\'
%训练数据
Is = imread('Track_file\\tower1.bmp');
load Track_file\\track1.mat
load Track_file\\track2.mat
figure(1);
subplot(121);
imshow(Is);
hold on;
X1=[];
Y1=[];
T1=[];
W1=[];
H1=[];
for i = 1:length(track1)
i
if isempty(track1(1,i).x) == 1
X = 0;
Y = 0;
else
X = cell2mat(track1(1,i).x(1,1));
Y = cell2mat(track1(1,i).y(1,1));
X1=[X1;cell2mat(track1(1,i).x(1,1))];
Y1=[Y1;cell2mat(track1(1,i).y(1,1))];
T1=[T1;cell2mat(track1(1,i).time(1,1))];
W1=[W1;cell2mat(track1(1,i).w(1,1))];
H1=[H1;cell2mat(track1(1,i).h(1,1))];
end
plot(X,Y,'c.');
hold on;
end
title('Track1');
subplot(122);
imshow(Is);
hold on;
X2=[];
Y2=[];
T2=[];
W2=[];
H2=[];
for i = 1:length(track2)
i
if isempty(track2(1,i).x) == 1
X = 0;
Y = 0;
else
X = cell2mat(track2(1,i).x(1,1));
Y = cell2mat(track2(1,i).y(1,1));
X2=[X2;cell2mat(track2(1,i).x(1,1))];
Y2=[Y2;cell2mat(track2(1,i).y(1,1))];
T2=[T2;cell2mat(track2(1,i).time(1,1))];
W2=[W2;cell2mat(track2(1,i).w(1,1))];
H2=[H2;cell2mat(track2(1,i).h(1,1))];
end
plot(X,Y,'c.');
hold on;
end
title('Track2');
tao=20;
X1s=[];
Y1s=[];
T1s=[];
W1s=[];
H1s=[];
X_samp = [];
Y_samp = [];
T_samp = [];
W_samp = [];
H_samp = [];
X_samps1 = [];
Y_samps1 = [];
T_samps1 = [];
W_samps1 = [];
H_samps1 = [];
for i = 1:length(track1)
i
if isempty(track1(1,i).x) == 1
X1si=0;
Y1si=0;
T1si=0;
W1si=0;
H1si=0;
else
X1si=cell2mat(track1(1,i).x(1,1));
Y1si=cell2mat(track1(1,i).y(1,1));
T1si=cell2mat(track1(1,i).time(1,1));
W1si=cell2mat(track1(1,i).w(1,1));
H1si=cell2mat(track1(1,i).h(1,1));
end
if i <= tao;
X_samp = (X1si);
Y_samp = (Y1si);
T_samp = 0.00001*ones(length(X_samp),1);
W_samp = (W1si);
H_samp = (H1si);
else
X_samp = (X1si);
Y_samp = (Y1si);
T_samp = 0.00001*ones(length(X_samp),1);
Ls = min(length(X1si),length(X1si-tao));
for j = 1:Ls
T_samp(j,1) = sqrt((X1si(j) - X1si-tao(j))^2 + (Y1si(j) - Y1si-tao(j))^2)/tao;
end
W_samp = (W1si);
H_samp = (H1si);
end
X_samps1 = [X_samps1;X_samp];
Y_samps1 = [Y_samps1;Y_samp];
T_samps1 = [T_samps1;T_samp];
W_samps1 = [W_samps1;W_samp];
H_samps1 = [H_samps1;H_samp];
end
X2s=[];
Y2s=[];
T2s=[];
W2s=[];
H2s=[];
X_samp = [];
Y_samp = [];
T_samp = [];
W_samp = [];
H_samp = [];
X_samps2 = [];
Y_samps2 = [];
T_samps2 = [];
W_samps2 = [];
H_samps2 = [];
for i = 1:length(track2)
i
if isempty(track2(1,i).x) == 1
X2si=0;
Y2si=0;
T2si=0;
W2si=0;
H2si=0;
else
X2si=cell2mat(track2(1,i).x(1,1));
Y2si=cell2mat(track2(1,i).y(1,1));
T2si=cell2mat(track2(1,i).time(1,1));
W2si=cell2mat(track2(1,i).w(1,1));
H2si=cell2mat(track2(1,i).h(1,1));
end
if i <= tao;
X_samp = (X2si);
Y_samp = (Y2si);
T_samp = 0.00001*ones(length(X_samp),1);
W_samp = (W2si);
H_samp = (H2si);
else
X_samp = (X2si);
Y_samp = (Y2si);
T_samp = 0.00001*ones(length(X_samp),1);
Ls = min(length(X2si),length(X2si-tao));
for j = 1:Ls
T_samp(j,1) = sqrt((X2si(j) - X2si-tao(j))^2 + (Y2si(j) - Y2si-tao(j))^2)/tao;
end
W_samp = (W2si);
H_samp = (H2si);
end
X_samps2 = [X_samps2;X_samp];
Y_samps2 = [Y_samps2;Y_samp];
T_samps2 = [T_samps2;T_samp];
W_samps2 = [W_samps2;W_samp];
H_samps2 = [H_samps2;H_samp];
end
%原始数据的训练,用set2的数据来训练
feature1 = [X_samps1,Y_samps1,T_samps1,W_samps1,H_samps1];
feature2 = [X_samps2,Y_samps2,T_samps2,W_samps2,H_samps2];
feature = [feature2(5000:7000,:)];%
tmps = feature;
[Px, model] = gmm(tmps,2);
% save EmGmm_model.mat model
% figure;
% imshow(Is);
% hold on;
% [~, cls_ind] = max(Px',[],1);
% for tt = 1:1
% tt
% for jj = 1:length(cls_ind);
% if cls_ind(jj)==1
% plot(feature(jj,1),feature(jj,2),'b.');
% end
% if cls_ind(jj)==2
% plot(feature(jj,1),feature(jj,2),'r.');
% end
% hold on;
% end
% title('异常行为识别');
% end
clc;
clear;
close all;
warning off;
addpath 'func\\'
%初始背景的提取
%注意,原始的视频非常大,这里需要截取其中需要处理的帧数
Bg_Length = 20;
Start_Frame = Bg_Length+1;
End_Frame = 999;
Simulation_frame = min(800,End_Frame);
avi1 = aviread('vedio\\4.AVI',[Start_Frame:End_Frame]);
vedio1 = avi1.cdata;
avi2 = aviread('vedio\\4.AVI',[1:Bg_Length]);
vedio2 = avi2.cdata;
vedio = [vedio2,vedio1];
%步骤一:结合高斯混合模型的帧差法进行目标的提取
%这个步骤主要是目标提取,并获得特征序列两个部分
RR = 240;%处理视频大小
CC = 320;
K = 4; %组件
Alpha = 0.002; %适应权重速度
Rho = 0.01; %适应权重速度协方差
Deviation_sq = 49; %阈值用于查找匹配
Variance = 2; %初始方差为新放置组件
Props = 0.00001; %最初为新放置
Back_Thresh = 0.6; %体重的比例必须占背景模型
Comp_Thresh = 10; %滤掉连接组件的较小的尺寸
SHADOWS = [0.7,0.25,0.85,0.95];
frameNum_Original = length(vedio);
CRGB = 3;
D = RR * CC;
Temp = zeros(RR,CC,CRGB,frameNum_Original,'uint8');
for tt = 1:frameNum_Original
im = vediott;
Temp(:,:,:,tt) = im;
end
Temp = reshape(Temp,size(Temp,1)*size(Temp,2),size(Temp,3),size(Temp,4));
Mus = zeros(D,K,CRGB);
Mus(:,1,:) = double(Temp(:,:,1));
Mus(:,2:K,:) = 255*rand([D,K-1,CRGB]);
Sigmas = Variance*ones(D,K,CRGB);
Weights = [ones(D,1),zeros(D,K-1)];
Squared = zeros(D,K);
Gaussian = zeros(D,K);
Weight = zeros(D,K);
background = zeros(RR,CC);
Shadows = zeros(RR,CC);
Images0 = zeros(RR,CC);
Images1 = zeros(RR,CC);
Images2 = zeros(RR,CC);
background_Update = zeros(RR,CC,CRGB);
Xft = [];
Yft = [];
Timeft = [];
Wft = [];
Hft = [];
Smin = 50;
Smax = 150;
PAlpha_min = 0.001;
PAlpha_max = 0.004;
Pdf1 = 0;
Pdf2 = 0;
tao = 20;
Xx = [];
flag = 0;
Xf_save = cell(End_Frame,1);
Yf_save = cell(End_Frame,1);
Timef_save = cell(End_Frame,1);
Wf_save = cell(End_Frame,1);
Hf_save = cell(End_Frame,1);
S = 0;
load EmGmm_model.mat;
for tt = 1:Simulation_frame
disp('当前帧数');
tt
%由分析得到的反馈信号
%由分析得到的反馈信号
%Minimum Object Size 反馈,目标大小检测
if tt > 1
Ss = Smin*Pdf1 + Smax*(1-Pdf1);
else
Ss = Smin;
end
%Background Learning Rate 反馈,背景更新学习率
if tt > 1
Alpha = PAlpha_min*Pdf2 + PAlpha_max*(1-Pdf2);
else
Alpha = PAlpha_min;
end
%基于高斯混合模型的帧差分背景提取算法
%基于高斯混合模型的帧差分背景提取算法
image = Temp(:,:,tt);
for kk = 1:K
Datac = double(Temp(:,:,tt))-reshape(Mus(:,kk,:),D,CRGB);
Squared(:,kk) = sum((Datac.^ 2)./reshape(Sigmas(:,kk,:),D,CRGB),2);
end
[junk,index] = min(Squared,[],2);
Gaussian = zeros(size(Squared));
Gaussian(sub2ind(size(Squared),1:length(index),index')) = ones(D,1);
Gaussian = Gaussian&(Squared<Deviation_sq);
%参数更新
Weights = (1-Alpha).*Weights+Alpha.*Gaussian;
for kk = 1:K
pixel_matched = repmat(Gaussian(:,kk),1,CRGB);
pixel_unmatched = abs(pixel_matched-1);
Mu_kk = reshape(Mus(:,kk,:),D,CRGB);
Sigma_kk = reshape(Sigmas(:,kk,:),D,CRGB);
Mus(:,kk,:) = pixel_unmatched.*Mu_kk+pixel_matched.*(((1-Rho).*Mu_kk)+(Rho.*double(image)));
Mu_kk = reshape(Mus(:,kk,:),D,CRGB);
Sigmas(:,kk,:) = pixel_unmatched.*Sigma_kk+pixel_matched.*(((1-Rho).*Sigma_kk)+repmat((Rho.* sum((double(image)-Mu_kk).^2,2)),1,CRGB));
end
replaced_gaussian = zeros(D,K);
mismatched = find(sum(Gaussian,2)==0);
for ii = 1:length(mismatched)
[junk,index] = min(Weights(mismatched(ii),:)./sqrt(Sigmas(mismatched(ii),:,1)));
replaced_gaussian(mismatched(ii),index) = 1;
Mus(mismatched(ii),index,:) = image(mismatched(ii),:);
Sigmas(mismatched(ii),index,:) = ones(1,CRGB)*Variance;
Weights(mismatched(ii),index) = Props;
end
Weights = Weights./repmat(sum(Weights,2),1,K);
active_gaussian = Gaussian+replaced_gaussian;
%背景分割
[junk,index] = sort(Weights./sqrt(Sigmas(:,:,1)),2,'descend');
bg_gauss_good = index(:,1);
linear_index = (index-1)*D+repmat([1:D]',1,K);
weights_ordered = Weights(linear_index);
for kk = 1:K
Weight(:,kk)= sum(weights_ordered(:,1:kk),2);
end
bg_gauss(:,2:K) = Weight(:,1:(K-1)) < Back_Thresh;
bg_gauss(:,1) = 1;
bg_gauss(linear_index) = bg_gauss;
active_background_gaussian = active_gaussian & bg_gauss;
foreground_pixels = abs(sum(active_background_gaussian,2)-1);
foreground_map = reshape(sum(foreground_pixels,2),RR,CC);
Images1(:,:,tt) = foreground_map;
objects_map = zeros(size(foreground_map),'int32');
object_sizes = [];
Obj_pos = [];
new_label = 1;
%计算连通区域
[label_map,num_labels] = bwlabel(foreground_map,8);
for label = 1:num_labels
object = (label_map == label);
object_size = sum(sum(object));
if(object_size >= Comp_Thresh)
objects_map = objects_map + int32(object * new_label);
object_sizes(new_label) = object_size;
[X,Y] = meshgrid(1:CC,1:RR);
object_x = X.*object;
object_y = Y.*object;
Obj_pos(:,new_label) = [sum(sum(object_x)) / object_size;
sum(sum(object_y)) / object_size];
new_label = new_label + 1;
end
end
num_objects = new_label - 1;
%去除阴影
index = sub2ind(size(Mus),reshape(repmat([1:D],CRGB,1),D*CRGB,1),reshape(repmat(bg_gauss_good',CRGB,1),D*CRGB,1),repmat([1:CRGB]',D,1));
background = reshape(Mus(index),CRGB,D);
background = reshape(background',RR,CC,CRGB);
background = uint8(background);
background_Update = background;
background_hsv = rgb2hsv(background);
image_hsv = rgb2hsv(vediott);
for i = 1:RR
for j = 1:CC
if (objects_map(i,j))&&...
(abs(image_hsv(i,j,1)-background_hsv(i,j,1))<SHADOWS(1))&&...
(image_hsv(i,j,2)-background_hsv(i,j,2)<SHADOWS(2))&&...
(SHADOWS(3)<=image_hsv(i,j,3)/background_hsv(i,j,3)<=SHADOWS(4))
Shadows(i,j) = 1;
else
Shadows(i,j) = 0;
end
end
end
%运动目标检测,二值图
Images0 = objects_map;
objecs_adjust_map = Shadows;
Images3 = objecs_adjust_map;
%运动目标检测-最后处理结果
[res3,res4,Xf,Yf,Timef,Wf,Hf] = func_fangk(Images0,vediott,tt,Bg_Length,Ss);
%根据上面的结果,提取特征向量
%根据上面的结果,提取特征向量
Lens = 800;
if length(Xft) < Lens
Xft = [Xft;Xf];
Yft = [Yft;Yf];
Timeft= [Timeft;Timef];
Wft = [Wft;Wf];
Hft = [Hft;Hf];
else
Xft = [Xft;Xf];
Yft = [Yft;Yf];
Timeft= [Timeft;Timef];
Wft = [Wft;Wf];
Hft = [Hft;Hf];
Xft(1:end-800) = [];
Yft(1:end-800) = [];
Timeft(1:end-800)= [];
Wft(1:end-800) = [];
Hft(1:end-800) = [];
end
figure(2);
subplot(121)
imshow(vediott);
title('原始图像');
subplot(122)
imshow(uint8(res3),[]);
hold on;
if tt > Bg_Length
if length(Xft) > Lens
VX = Xft(length(Xft)-Lens:length(Xft));
VY = Yft(length(Xft)-Lens:length(Xft));
plot(Xft(length(Xft)-Lens:length(Xft)),Yft(length(Xft)-Lens:length(Xft)),'c.');
else
VX = Xft;
VY = Yft;
plot(Xft,Yft,'c.');
end
end
title('运动目标检测结果');
%计算Pdf1
tmps = [Wf,Hf];
[Ns,Ds] = size(tmps);
Pdf1s = min(calc_prob(tmps,Ns,2,model.Miu(:,4:5),model.Sigma(4:5,4:5,:),Ds));
Pdf1 = mean(Pdf1s);
%计算Pdf2
if mod(tt,Lens) <= 20
tmps = 0;
else
tmps = sqrt((Xft(mod(tt,Lens))-Xft(mod(tt,Lens)-20))^2+(Yft(mod(tt,Lens))-Yft(mod(tt,Lens)-20))^2)/20;
end
[Ns,Ds] = size(tmps);
Pdf2s = min(calc_prob(tmps,Ns,2,model.Miu(:,5),model.Sigma(5,5,:),Ds));
Pdf2 = mean(Pdf2s);
pause(0.01);
%将数据保存,用于后期处理
Xf_savett= Xf;
Yf_savett= Yf;
Timef_savett= Timef;
Wf_savett= Wf;
Hf_savett= Hf;
Pimagestt= Images0;
end
save TEMP\\R4.mat Xf_save Yf_save Timef_save Wf_save Hf_save Pimages
clc;
clear;
close all;
warning off;
addpath 'func\\'
%通过前面的目标跟踪,这里我们主要对最后的结果进行显示
%本质上C这个程序是B里面的,但是由于涉及到的变量较多,如果再增加一些显示的变量,仿真及其缓慢,而且会出现OUT OF Memory
%所以这里单独对结论进行显示
%初始背景的提取
%注意,原始的视频非常大,这里需要截取其中需要处理的帧数
Bg_Length = 20;
Start_Frame = Bg_Length+1;
End_Frame = 999;
Simulation_frame = min(800,End_Frame);
load EmGmm_model.mat;
load TEMP\\R4.mat
avi1 = aviread('vedio\\4.AVI',[Start_Frame:End_Frame]);
vedio1 = avi1.cdata;
avi2 = aviread('vedio\\4.AVI',[1:Bg_Length]);
vedio2 = avi2.cdata;
vedio = [vedio2,vedio1];
tao = 20;
X_samp = [];
Y_samp = [];
T_samp = [];
W_samp = [];
H_samp = [];
X_samps = [];
Y_samps = [];
T_samps = [];
W_samps = [];
H_samps = [];
X_samps2 = [];
Y_samps2 = [];
T_samps2 = [];
W_samps2 = [];
H_samps2 = [];
for tt = 1:Simulation_frame;
tt
Images0 = Pimagestt;
[res3,res4,Xf,Yf,Timef,Wf,Hf] = func_fangk2(Images0,vediott,tt,Bg_Length);
%下面开始进行异常类型识别
%重新采样
X_sampstt = Xf;
Y_sampstt = Yf;
T_sampstt = Timef;
W_sampstt = Wf;
H_sampstt = Hf;
if tt <= tao;
X_samp = Xf;
Y_samp = Yf;
T_samp = Timef;
W_samp = Wf;
H_samp = Hf;
else
X_samp = Xf;
Y_samp = Yf;
T_samp = 0.001*ones(length(X_samp),1);
Ls = min(length(X_sampstt),length(X_sampstt-tao));
for j = 1:Ls
T_samp(j,1) = sqrt((X_sampstt(j) - X_sampstt-tao(j))^2 + (Y_sampstt(j) - Y_sampstt-tao(j))^2)/tao;
end
W_samp = Wf;
H_samp = Hf;
end
X_samps2 = [X_samps2;X_samp];
Y_samps2 = [Y_samps2;Y_samp];
T_samps2 = [T_samps2;T_samp];
W_samps2 = [W_samps2;W_samp];
H_samps2 = [H_samps2;H_samp];
end
feature = [X_samps2,Y_samps2,T_samps2,W_samps2,H_samps2];
[Ns,Ds] = size(feature);
Px = calc_prob(feature,Ns,2,model.Miu,model.Sigma,Ds);
[~, cls_ind] = max(Px',[],1);
%最后完异常检测效果
XV = [];
YV = [];
for tt = 1:1
tt
Images0 = Pimagestt;
[res3,res4,Xf,Yf,Timef,Wf,Hf] = func_fangk2(Images0,vediott,tt,Bg_Length);
figure(1);
subplot(121)
imshow(vediott);
title('原始图像');
subplot(122)
imshow(uint8(res3),[]);
hold on;
for jj = 1:length(cls_ind);
if length(find(cls_ind==1)) > 1.2*length(find(cls_ind==2))
if cls_ind(jj)==1
plot(X_samps2(jj),Y_samps2(jj),'b.');
XV(jj,1) = [X_samps2(jj)];
YV(jj,1) = [Y_samps2(jj)];
XV(jj,2) = [1];
YV(jj,2) = [1];
else
plot(X_samps2(jj),Y_samps2(jj),'r.');
XV(jj,1) = [X_samps2(jj)];
YV(jj,1) = [Y_samps2(jj)];
XV(jj,2) = [2];
YV(jj,2) = [2];
end
end
if length(find(cls_ind==1)) <= 1.2*length(find(cls_ind==2))
if cls_ind(jj)==1
plot(X_samps2(jj),Y_samps2(jj),'r.');
XV(jj,1) = [X_samps2(jj)];
YV(jj,1) = [Y_samps2(jj)];
XV(jj,2) = [2];
YV(jj,2) = [2];
else
plot(X_samps2(jj),Y_samps2(jj),'b.');
XV(jj,1) = [X_samps2(jj)];
YV(jj,1) = [Y_samps2(jj)];
XV(jj,2) = [1];
YV(jj,2) = [1];
end
end
hold on;
end
title('异常行为识别');
pause(0.0025);
end
%异常检测动画效果,将系统最后处理的结果进行显示
S1 = 0;
E1 = 0;
for tt = 1:Simulation_frame;
tt
Images0 = Pimagestt;
[res3,res4,Xf,Yf,Timef,Wf,Hf] = func_fangk2(Images0,vediott,tt,Bg_Length);
figure(2);
subplot(121)
imshow(vediott);
title('原始图像');
subplot(122)
imshow(uint8(res3),[]);
hold on;
S1 = E1 + 1;
E1 = E1 + length(Xf);
Xtmp = XV(1:E1,1);
Ytmp = YV(1:E1,1);
Flag = XV(1:E1,2);
for j = 1:length(Flag)
if Flag(j) == 1
plot(Xtmp(j),Ytmp(j),'b.');
hold on;
end
if Flag(j) == 2
plot(Xtmp(j),Ytmp(j),'r.');
hold on;
end
hold on;
end
hold on;
title('异常行为检测');
pause(0.01);
end
3.仿真结果




A10-19
以上是关于EM+GMM基于EM和GMM算法的目标轨迹跟踪和异常行为识别matlab仿真的主要内容,如果未能解决你的问题,请参考以下文章