飞行机器人--- ZED2& YOLO &ROS第一视角目标检测
Posted Techblog of HaoWANG
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了飞行机器人--- ZED2& YOLO &ROS第一视角目标检测相关的知识,希望对你有一定的参考价值。


目录
1. 编译安装ZED2 SDK
- ZED2 双目相机介绍
 https://haowang.blog.csdn.net/article/details/115395024
https://haowang.blog.csdn.net/article/details/115395024- ZED2 SDK for Ubuntu Melodic 编译安装
process[zed2/zed2_state_publisher-1]: started with pid [21566]
process[zed2/zed_node-2]: started with pid [21567]
[ INFO] [1642149213.368943200]: Initializing nodelet with 6 worker threads.
[ INFO] [1642149213.384512349]: ********** Starting nodelet '/zed2/zed_node' **********
[ INFO] [1642149213.384560547]: SDK version : 3.6.1
[ INFO] [1642149213.384614151]: *** GENERAL PARAMETERS ***
[ INFO] [1642149213.385310354]: * Camera Name -> zed2
[ INFO] [1642149213.386005520]: * Camera Resolution -> HD720
[ INFO] [1642149213.386716376]: * Camera Grab Framerate -> 60
[ INFO] [1642149213.387424880]: * Gpu ID -> -1
[ INFO] [1642149213.388100827]: * Camera ID -> -1
[ INFO] [1642149213.388856820]: * Verbose -> ENABLED
[ INFO] [1642149213.390323213]: * Camera Flip -> DISABLED
[ INFO] [1642149213.391695868]: * Self calibration -> ENABLED
[ INFO] [1642149213.393167485]: * Camera Model by param -> zed2
[ INFO] [1642149213.393184894]: *** VIDEO PARAMETERS ***
[ INFO] [1642149213.393914023]: * Image resample factor -> 1
[ INFO] [1642149213.394604162]: * Extrinsic param. frame -> X RIGHT - Y DOWN - Z FWD
[ INFO] [1642149213.394621286]: *** DEPTH PARAMETERS ***
[ INFO] [1642149213.395363921]: * Depth quality -> QUALITY
[ INFO] [1642149213.396108953]: * Depth Sensing mode -> STANDARD
[ INFO] [1642149213.396767171]: * OpenNI mode -> DISABLED
[ INFO] [1642149213.397515603]: * Depth Stabilization -> ENABLED
[ INFO] [1642149213.398202246]: * Minimum depth -> 0.2 m
[ INFO] [1642149213.398970680]: * Maximum depth -> 20 m
[ INFO] [1642149213.399716636]: * Depth resample factor -> 1
[ INFO] [1642149213.399735849]: *** POSITIONAL TRACKING PARAMETERS ***
[ INFO] [1642149213.400429563]: * Path rate -> 2 Hz
[ INFO] [1642149213.401184025]: * Path history size -> 1
[ INFO] [1642149213.402676496]: * Odometry DB path ->
[ INFO] [1642149213.404083331]: * Spatial Memory -> ENABLED
[ INFO] [1642149213.405562174]: * IMU Fusion -> ENABLED
[ INFO] [1642149213.406940813]: * Floor alignment -> DISABLED
[ INFO] [1642149213.408271614]: * Init Odometry with first valid pose data -> ENABLED
[ INFO] [1642149213.409462084]: * Two D mode -> DISABLED
[ INFO] [1642149213.410675923]: *** MAPPING PARAMETERS ***
[ INFO] [1642149213.412013372]: * Mapping -> DISABLED
[ INFO] [1642149213.412036511]: *** OBJECT DETECTION PARAMETERS ***
[ INFO] [1642149213.413362603]: * Object Detection -> DISABLED
[ INFO] [1642149213.413385257]: *** SENSORS PARAMETERS ***
[ INFO] [1642149213.414104327]: * Sensors timestamp sync -> ENABLED
[ INFO] [1642149213.414127017]: *** SVO PARAMETERS ***
[ INFO] [1642149213.415530879]: * SVO input file: ->
[ INFO] [1642149213.416286067]: * SVO REC compression -> H265 (HEVC)
[ INFO] [1642149213.417716127]: *** COORDINATE FRAMES ***
[ INFO] [1642149213.421844230]: * map_frame -> map
[ INFO] [1642149213.421869284]: * odometry_frame -> odom
[ INFO] [1642149213.421881695]: * base_frame -> base_link
[ INFO] [1642149213.421891977]: * camera_frame -> zed2_camera_center
[ INFO] [1642149213.421901554]: * imu_link -> zed2_imu_link
[ INFO] [1642149213.421917151]: * left_camera_frame -> zed2_left_camera_frame
[ INFO] [1642149213.421932146]: * left_camera_optical_frame -> zed2_left_camera_optical_frame
[ INFO] [1642149213.421945406]: * right_camera_frame -> zed2_right_camera_frame
[ INFO] [1642149213.421955431]: * right_camera_optical_frame -> zed2_right_camera_optical_frame
[ INFO] [1642149213.421980148]: * depth_frame -> zed2_left_camera_frame
[ INFO] [1642149213.421997938]: * depth_optical_frame -> zed2_left_camera_optical_frame
[ INFO] [1642149213.422015521]: * disparity_frame -> zed2_left_camera_frame
[ INFO] [1642149213.422027133]: * disparity_optical_frame -> zed2_left_camera_optical_frame
[ INFO] [1642149213.422037187]: * confidence_frame -> zed2_left_camera_frame
[ INFO] [1642149213.422049343]: * confidence_optical_frame -> zed2_left_camera_optical_frame
[ INFO] [1642149213.423609543]: * Broadcast odometry TF -> ENABLED
[ INFO] [1642149213.425332991]: * Broadcast map pose TF -> ENABLED
[ INFO] [1642149213.427023236]: * Broadcast IMU pose TF -> ENABLED
[ INFO] [1642149213.427104834]: *** DYNAMIC PARAMETERS (Init. values) ***
[ INFO] [1642149213.427964034]: * [DYN] Depth confidence -> 50
[ INFO] [1642149213.428883378]: * [DYN] Depth texture conf. -> 100
[ INFO] [1642149213.429845526]: * [DYN] pub_frame_rate -> 15 Hz
[ INFO] [1642149213.430821472]: * [DYN] point_cloud_freq -> 15 Hz
[ INFO] [1642149213.431756101]: * [DYN] brightness -> 4
[ INFO] [1642149213.432671814]: * [DYN] contrast -> 4
[ INFO] [1642149213.433581611]: * [DYN] hue -> 0
[ INFO] [1642149213.434449067]: * [DYN] saturation -> 4
[ INFO] [1642149213.435290984]: * [DYN] sharpness -> 4
[ INFO] [1642149213.436176381]: * [DYN] gamma -> 8
[ INFO] [1642149213.437045933]: * [DYN] auto_exposure_gain -> ENABLED
[ INFO] [1642149213.439522653]: * [DYN] auto_whitebalance -> ENABLED
[ INFO] [1642149213.452096972]: * Camera coordinate system -> Right HANDED Z UP and X FORWARD
[ INFO] [1642149213.452319093]: *** Opening ZED 2...
[ZED][Init] Depth mode: QUALITY
[ZED][Init][Info] Camera successfully opened.
[ZED][Init][Info] Camera FW version: 1523
[ZED][Init] Video mode: HD720@60
[ INFO] [1642149214.486814533]: ZED connection -> SUCCESS
[ INFO] [1642149216.487113907]: ... ZED ready
[ INFO] [1642149216.487182653]: ZED SDK running on GPU #0
[ INFO] [1642149216.497321863]: Camera-IMU Transform:
560303564238
0.999999 0.001390 -0.000203 -0.002000
-0.001390 0.999999 -0.000138 -0.023000
0.000203 0.000138 1.000000 0.000220
0.000000 0.000000 0.000000 1.000000
[ INFO] [1642149216.497401123]: * CAMERA MODEL -> ZED 2
[ INFO] [1642149216.497458430]: * Serial Number -> 27871166
[ INFO] [1642149216.497517485]: * Camera FW Version -> 1523
[ INFO] [1642149216.497566906]: * Sensors FW Version -> 776
[ INFO] [1642149216.664035161]: Advertised on topic /zed2/zed_node/rgb/image_rect_color
[ INFO] [1642149216.664160171]: Advertised on topic /zed2/zed_node/rgb/camera_info
[ INFO] [1642149216.689862856]: Advertised on topic /zed2/zed_node/rgb_raw/image_raw_color
[ INFO] [1642149216.690750078]: Advertised on topic /zed2/zed_node/rgb_raw/camera_info
[ INFO] [1642149216.712094698]: Advertised on topic /zed2/zed_node/left/image_rect_color
[ INFO] [1642149216.712123250]: Advertised on topic /zed2/zed_node/left/camera_info
[ INFO] [1642149216.735768592]: Advertised on topic /zed2/zed_node/left_raw/image_raw_color
[ INFO] [1642149216.735815945]: Advertised on topic /zed2/zed_node/left_raw/camera_info
[ INFO] [1642149216.758797605]: Advertised on topic /zed2/zed_node/right/image_rect_color
[ INFO] [1642149216.758827654]: Advertised on topic /zed2/zed_node/right/camera_info
[ INFO] [1642149216.775849899]: Advertised on topic /zed2/zed_node/right_raw/image_raw_color
[ INFO] [1642149216.775887200]: Advertised on topic /zed2/zed_node/right_raw/camera_info
[ INFO] [1642149216.792746670]: Advertised on topic /zed2/zed_node/rgb/image_rect_gray
[ INFO] [1642149216.792777650]: Advertised on topic /zed2/zed_node/rgb/camera_info
[ INFO] [1642149216.812400990]: Advertised on topic /zed2/zed_node/rgb_raw/image_raw_gray
[ INFO] [1642149216.812438134]: Advertised on topic /zed2/zed_node/rgb_raw/camera_info
[ INFO] [1642149216.830344011]: Advertised on topic /zed2/zed_node/left/image_rect_gray
[ INFO] [1642149216.830402822]: Advertised on topic /zed2/zed_node/left/camera_info
[ INFO] [1642149216.849373769]: Advertised on topic /zed2/zed_node/left_raw/image_raw_gray
[ INFO] [1642149216.849458039]: Advertised on topic /zed2/zed_node/left_raw/camera_info
[ INFO] [1642149216.871854075]: Advertised on topic /zed2/zed_node/right/image_rect_gray
[ INFO] [1642149216.871970921]: Advertised on topic /zed2/zed_node/right/camera_info
[ INFO] [1642149216.899936842]: Advertised on topic /zed2/zed_node/right_raw/image_raw_gray
[ INFO] [1642149216.900060430]: Advertised on topic /zed2/zed_node/right_raw/camera_info
[ INFO] [1642149216.925388957]: Advertised on topic /zed2/zed_node/depth/depth_registered
[ INFO] [1642149216.925447338]: Advertised on topic /zed2/zed_node/depth/camera_info
[ INFO] [1642149216.949420569]: Advertised on topic /zed2/zed_node/stereo/image_rect_color
[ INFO] [1642149216.973054880]: Advertised on topic /zed2/zed_node/stereo_raw/image_raw_color
[ INFO] [1642149216.974020526]: Advertised on topic /zed2/zed_node/confidence/confidence_map
[ INFO] [1642149216.974726124]: Advertised on topic /zed2/zed_node/disparity/disparity_image
[ INFO] [1642149216.975438999]: Advertised on topic /zed2/zed_node/point_cloud/cloud_registered
[ INFO] [1642149216.976218455]: Advertised on topic /zed2/zed_node/pose
[ INFO] [1642149216.976965776]: Advertised on topic /zed2/zed_node/pose_with_covariance
[ INFO] [1642149216.977849947]: Advertised on topic /zed2/zed_node/odom
[ INFO] [1642149216.978511182]: Advertised on topic /zed2/zed_node/path_odom
[ INFO] [1642149216.979253776]: Advertised on topic /zed2/zed_node/path_map
[ INFO] [1642149216.980180350]: Advertised on topic /zed2/zed_node/imu/data
[ INFO] [1642149216.980878202]: Advertised on topic /zed2/zed_node/imu/data_raw
[ INFO] [1642149216.981620620]: Advertised on topic /zed2/zed_node/imu/mag
[ INFO] [1642149216.982222664]: Advertised on topic /zed2/zed_node/temperature/imu
[ INFO] [1642149216.982927092]: Advertised on topic /zed2/zed_node/atm_press
[ INFO] [1642149216.983521720]: Advertised on topic /zed2/zed_node/temperature/left
[ INFO] [1642149216.984222182]: Advertised on topic /zed2/zed_node/temperature/right
[ INFO] [1642149216.984930142]: Advertised on topic /zed2/zed_node/left_cam_imu_transform [LATCHED]
[ZED][Grab] Detected Connection Failure. Trying to recover the camera with sn 27871166 ...
...[INFO] Camera module reset
.MCU reset sent.......
[ZED][Grab] Automatically recover from image capture failure -> SUCCESS
[ZED][Grab] Detected Connection Failure. Trying to recover the camera with sn 27871166 ...
...[INFO] Camera module reset
.MCU reset sent.......
[ZED][Grab] Automatically recover from image capture failure -> SUCCESS
[ZED][Grab] Detected Connection Failure. Trying to recover the camera with sn 27871166 ...
...[INFO] Camera module reset
.MCU reset sent.......
[ZED][Grab] Automatically recover from image capture failure -> SUCCESS
[ZED][Grab] Detected Connection Failure. Trying to recover the camera with sn 27871166 ...
...[INFO] Camera module reset
.MCU reset sent.......
[ZED][Grab] Automatically recover from image capture failure -> SUCCESS
[ZED][Grab] Detected Connection Failure. Trying to recover the camera with sn 27871166 ...
...[INFO] Camera module reset
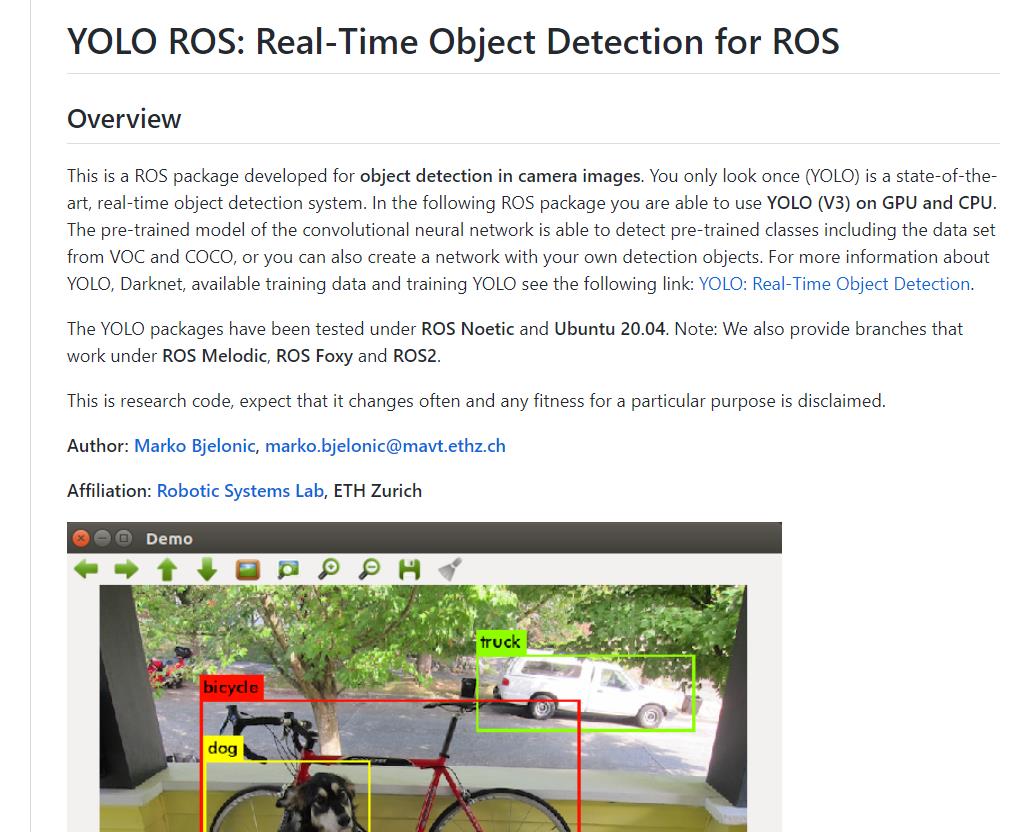
2. YOLO V3 for ROS
注意:需要先安装CUDA11.2和cuDNN8.1.0
项目github源码地址:https://github.com/leggedrobotics/darknet_ros
或者ubuntu melodic分支 https://github.com/leggedrobotics/darknet_ros/tree/melodic
1. git clone源码
In order to install darknet_ros, clone the latest version using SSH (see how to set up an SSH key) from this repository into your catkin workspace and compile the package using ROS.
cd catkin_workspace/src git clone --recursive git@github.com:leggedrobotics/darknet_ros.git cd ../2. 编译安装
To maximize performance, make sure to build in Release mode. You can specify the build type by setting
catkin_make -DCMAKE_BUILD_TYPE=Releaseor using the Catkin Command Line Tools
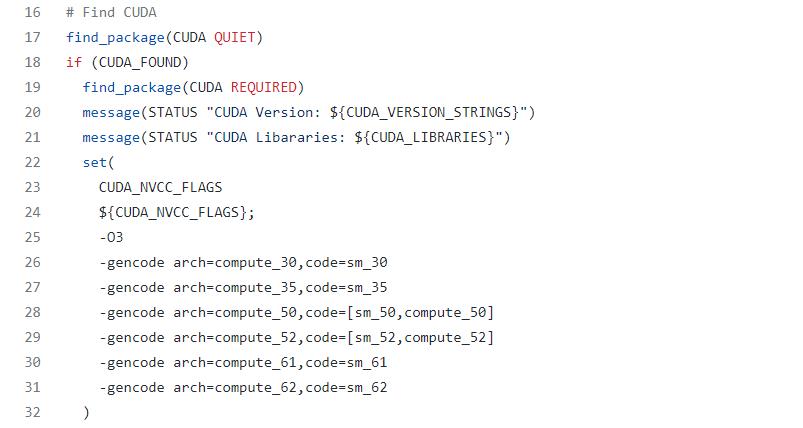
catkin build darknet_ros -DCMAKE_BUILD_TYPE=ReleaseDarknet on the CPU is fast (approximately 1.5 seconds on an Intel Core i7-6700HQ CPU @ 2.60GHz × 8) but it's like 500 times faster on GPU! You'll have to have an Nvidia GPU and you'll have to install CUDA. The CMakeLists.txt file automatically detects if you have CUDA installed or not. CUDA is a parallel computing platform and application programming interface (API) model created by Nvidia. If you do not have CUDA on your System the build process will switch to the CPU version of YOLO. If you are compiling with CUDA, you might receive the following build error:
nvcc fatal : Unsupported gpu architecture 'compute_61'.This means that you need to check the compute capability (version) of your GPU. You can find a list of supported GPUs in CUDA here: CUDA - WIKIPEDIA. Simply find the compute capability of your GPU and add it into darknet_ros/CMakeLists.txt. Simply add a similar line like
-O3 -gencode arch=compute_62,code=sm_62
注意:常见编译错误
- Unsupported gpu architecture 'compute_30'
https://github.com/leggedrobotics/darknet_ros/issues/363
CMakeLists.txt文件注释掉 compute_30所在行即可
- 编译出错darknetXXX,需要执行
git clone --recursive git@github.com:leggedrobotics/darknet_ros.git
需要 --recursive 完整克隆该项目和darknet 项目,重新编译即可。
3. 下载weights模型文件
he yolo-voc.weights and tiny-yolo-voc.weights are downloaded automatically in the CMakeLists.txt file. If you need to download them again, go into the weights folder and download the two pre-trained weights from the COCO data set:
cd catkin_workspace/src/darknet_ros/darknet_ros/yolo_network_config/weights/ wget http://pjreddie.com/media/files/yolov2.weights wget http://pjreddie.com/media/files/yolov2-tiny.weightsAnd weights from the VOC data set can be found here:
wget http://pjreddie.com/media/files/yolov2-voc.weights wget http://pjreddie.com/media/files/yolov2-tiny-voc.weightsAnd the pre-trained weight from YOLO v3 can be found here:
wget http://pjreddie.com/media/files/yolov3-tiny.weights wget http://pjreddie.com/media/files/yolov3.weights
3. 配置系统参数
-
配置config
ros.yaml
general:
is_debug: false
image_fps: 60
subscribers:
camera_reading:
topic: /zed2/zed_node/rgb_raw/image_raw_color
queue_size: 1
actions:
camera_reading:
name: /darknet_ros/check_for_objects
publishers:
object_detector:
topic: /darknet_ros/found_object
queue_size: 1
latch: false
bounding_boxes:
topic: /darknet_ros/bounding_boxes
queue_size: 5
latch: false
detection_image:
topic: /darknet_ros/detection_image
queue_size: 1
latch: false
image_view:
enable_opencv: false
wait_key_delay: 1
enable_console_output: false
删除部分类别标签之后的yolov3.yaml
yolo_model:
config_file:
name: yolov3.cfg
weight_file:
name: yolov3.weights
threshold:
value: 0.3
detection_classes:
names:
- person
- bicycle
- car
- motorbike
- aeroplane
- bus
- truck
- boat
- traffic light
- bird
- cat
- dog
- horse-
下载weights
cd catkin_workspace/src/darknet_ros/darknet_ros/yolo_network_config/weights/
COCO data set (Yolo v2):
wget http://pjreddie.com/media/files/yolov2.weights
wget http://pjreddie.com/media/files/yolov2-tiny.weightsVOC data set (Yolo v2):
wget http://pjreddie.com/media/files/yolov2-voc.weights
wget http://pjreddie.com/media/files/yolov2-tiny-voc.weightsYolo v3:
wget http://pjreddie.com/media/files/yolov3.weights
wget http://pjreddie.com/media/files/yolov3-voc.weightsv3-voc 下载出错无法使用
-
配置launch
注意:YOLO订阅及发布的图像数据消息Topic需要根据实际情况修改
<?xml version="1.0" encoding="utf-8"?>
<launch>
<!-- Console launch prefix -->
<arg name="launch_prefix" default=""/>
<arg name="image" default="/zed2/zed_node/rgb_raw/image_raw_color" />
<!-- Config and weights folder. -->
<arg name="yolo_weights_path" default="$(find darknet_ros)/yolo_network_config/weights"/>
<arg name="yolo_config_path" default="$(find darknet_ros)/yolo_network_config/cfg"/>
<!-- ROS and network parameter files -->
<arg name="ros_param_file" default="$(find darknet_ros)/config/ros.yaml"/>
<!-- Load YOLO network mode parameter files -->
<arg name="network_param_file" default="$(find darknet_ros)/config/yolov3_test.yaml"/>
<!--arg name="network_param_file" default="$(find darknet_ros)/config/yolov3.yaml"-->
<!-- Load parameters -->
<rosparam command="load" ns="darknet_ros" file="$(arg ros_param_file)"/>
<rosparam command="load" ns="darknet_ros" file="$(arg network_param_file)"/>
<!-- Start darknet and ros wrapper -->
<node pkg="darknet_ros" type="darknet_ros" name="darknet_ros" output="screen" launch-prefix="$(arg launch_prefix)">
<param name="weights_path" value="$(arg yolo_weights_path)" />
<param name="config_path" value="$(arg yolo_config_path)" />
<remap from="camera/rgb/image_raw" to="$(arg image)" />
</node>
<!--<node name="republish" type="republish" pkg="image_transport" output="screen" args="compressed in:=/front_camera/image_raw raw out:=/camera/image_raw" /> -->
</launch>-
配置主从节点
# CUDA toolkits lib.bin.home path
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/local/cuda-11.2/lib64
export PATH=$PATH:/usr/local/cuda-11.2/bin
export CUDA_HOME=$CUDA_HOME:/usr/local/cuda-11.2/
export ROS_HOSTNAME=client.local
export ROS_MASTER_URI=http://client.local:11311
具体配置过程请参考ROS系列文章ROS从入门到精通系列(十五)-- 异构多版本ROS之间的多机通信问题_Techblog of HaoWANG-CSDN博客 https://haowang.blog.csdn.net/article/details/115564181
https://haowang.blog.csdn.net/article/details/115564181
4. 测试及使用
1. 启动主节点YOLO ROS
roslaunch darknet_ros darknet_ros.launch ... logging to /home/haowang/.ros/log/04d19790-776f-11ec-9b47-1831bf95775e/roslaunch-client-31665.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://client.local:38575/
SUMMARY
========
PARAMETERS
* /darknet_ros/actions/camera_reading/name: /darknet_ros/chec...
* /darknet_ros/config_path: /home/haowang/ros...
* /darknet_ros/general/image_fps: 60
* /darknet_ros/general/is_debug: False
* /darknet_ros/image_view/enable_console_output: False
* /darknet_ros/image_view/enable_opencv: False
* /darknet_ros/image_view/wait_key_delay: 1
* /darknet_ros/publishers/bounding_boxes/latch: False
* /darknet_ros/publishers/bounding_boxes/queue_size: 5
* /darknet_ros/publishers/bounding_boxes/topic: /darknet_ros/boun...
* /darknet_ros/publishers/detection_image/latch: False
* /darknet_ros/publishers/detection_image/queue_size: 1
* /darknet_ros/publishers/detection_image/topic: /darknet_ros/dete...
* /darknet_ros/publishers/object_detector/latch: False
* /darknet_ros/publishers/object_detector/queue_size: 1
* /darknet_ros/publishers/object_detector/topic: /darknet_ros/foun...
* /darknet_ros/subscribers/camera_reading/queue_size: 1
* /darknet_ros/subscribers/camera_reading/topic: /zed2/zed_node/rg...
* /darknet_ros/weights_path: /home/haowang/ros...
* /darknet_ros/yolo_model/config_file/name: yolov3.cfg
* /darknet_ros/yolo_model/detection_classes/names: ['person', 'bicyc...
* /darknet_ros/yolo_model/threshold/value: 0.3
* /darknet_ros/yolo_model/weight_file/name: yolov3.weights
* /rosdistro: melodic
* /rosversion: 1.14.12
NODES
/
darknet_ros (darknet_ros/darknet_ros)
auto-starting new master
process[master]: started with pid [31675]
ROS_MASTER_URI=http://client.local:11311
setting /run_id to 04d19790-776f-11ec-9b47-1831bf95775e
process[rosout-1]: started with pid [31686]
started core service [/rosout]
process[darknet_ros-2]: started with pid [31693]
[ INFO] [1642407925.708656046]: [YoloObjectDetector] Node started.
[ INFO] [1642407925.711519020]: [YoloObjectDetector] Xserver is running.
[ INFO] [1642407925.711921001]: [YoloObjectDetector] init().
[ INFO] [1642407925.745535802]: YOLO Paramters Loading:
layer filters size input output
0 conv 32 3 x 3 / 1 416 x 416 x 3 -> 416 x 416 x 32 0.299 BFLOPs
1 conv 64 3 x 3 / 2 416 x 416 x 32 -> 208 x 208 x 64 1.595 BFLOPs
2 conv 32 1 x 1 / 1 208 x 208 x 64 -> 208 x 208 x 32 0.177 BFLOPs
3 conv 64 3 x 3 / 1 208 x 208 x 32 -> 208 x 208 x 64 1.595 BFLOPs
4 res 1 208 x 208 x 64 -> 208 x 208 x 64
5 conv 128 3 x 3 / 2 208 x 208 x 64 -> 104 x 104 x 128 1.595 BFLOPs
6 conv 64 1 x 1 / 1 104 x 104 x 128 -> 104 x 104 x 64 0.177 BFLOPs
7 conv 128 3 x 3 / 1 104 x 104 x 64 -> 104 x 104 x 128 1.595 BFLOPs
8 res 5 104 x 104 x 128 -> 104 x 104 x 128
9 conv 64 1 x 1 / 1 104 x 104 x 128 -> 104 x 104 x 64 0.177 BFLOPs
10 conv 128 3 x 3 / 1 104 x 104 x 64 -> 104 x 104 x 128 1.595 BFLOPs
11 res 8 104 x 104 x 128 -> 104 x 104 x 128
12 conv 256 3 x 3 / 2 104 x 104 x 128 -> 52 x 52 x 256 1.595 BFLOPs
13 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128 0.177 BFLOPs
14 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BFLOPs
15 res 12 52 x 52 x 256 -> 52 x 52 x 256
16 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128 0.177 BFLOPs
17 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BFLOPs
18 res 15 52 x 52 x 256 -> 52 x 52 x 256
19 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128 0.177 BFLOPs
20 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BFLOPs
21 res 18 52 x 52 x 256 -> 52 x 52 x 256
22 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128 0.177 BFLOPs
23 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BFLOPs
24 res 21 52 x 52 x 256 -> 52 x 52 x 256
25 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128 0.177 BFLOPs
26 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BFLOPs
27 res 24 52 x 52 x 256 -> 52 x 52 x 256
28 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128 0.177 BFLOPs
29 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BFLOPs
30 res 27 52 x 52 x 256 -> 52 x 52 x 256
31 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128 0.177 BFLOPs
32 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BFLOPs
33 res 30 52 x 52 x 256 -> 52 x 52 x 256
34 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128 0.177 BFLOPs
35 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BFLOPs
36 res 33 52 x 52 x 256 -> 52 x 52 x 256
37 conv 512 3 x 3 / 2 52 x 52 x 256 -> 26 x 26 x 512 1.595 BFLOPs
38 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256 0.177 BFLOPs
39 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BFLOPs
40 res 37 26 x 26 x 512 -> 26 x 26 x 512
41 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256 0.177 BFLOPs
42 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BFLOPs
43 res 40 26 x 26 x 512 -> 26 x 26 x 512
44 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256 0.177 BFLOPs
45 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BFLOPs
46 res 43 26 x 26 x 512 -> 26 x 26 x 512
47 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256 0.177 BFLOPs
48 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BFLOPs
49 res 46 26 x 26 x 512 -> 26 x 26 x 512
50 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256 0.177 BFLOPs
51 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BFLOPs
52 res 49 26 x 26 x 512 -> 26 x 26 x 512
53 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256 0.177 BFLOPs
54 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BFLOPs
55 res 52 26 x 26 x 512 -> 26 x 26 x 512
56 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256 0.177 BFLOPs
57 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BFLOPs
58 res 55 26 x 26 x 512 -> 26 x 26 x 512
59 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256 0.177 BFLOPs
60 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BFLOPs
61 res 58 26 x 26 x 512 -> 26 x 26 x 512
62 conv 1024 3 x 3 / 2 26 x 26 x 512 -> 13 x 13 x1024 1.595 BFLOPs
63 conv 512 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 512 0.177 BFLOPs
64 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024 1.595 BFLOPs
65 res 62 13 x 13 x1024 -> 13 x 13 x1024
66 conv 512 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 512 0.177 BFLOPs
67 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024 1.595 BFLOPs
68 res 65 13 x 13 x1024 -> 13 x 13 x1024
69 conv 512 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 512 0.177 BFLOPs
70 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024 1.595 BFLOPs
71 res 68 13 x 13 x1024 -> 13 x 13 x1024
72 conv 512 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 512 0.177 BFLOPs
73 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024 1.595 BFLOPs
74 res 71 13 x 13 x1024 -> 13 x 13 x1024
75 conv 512 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 512 0.177 BFLOPs
76 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024 1.595 BFLOPs
77 conv 512 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 512 0.177 BFLOPs
78 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024 1.595 BFLOPs
79 conv 512 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 512 0.177 BFLOPs
80 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024 1.595 BFLOPs
81 conv 255 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 255 0.088 BFLOPs
82 yolo
83 route 79
84 conv 256 1 x 1 / 1 13 x 13 x 512 -> 13 x 13 x 256 0.044 BFLOPs
85 upsample 2x 13 x 13 x 256 -> 26 x 26 x 256
86 route 85 61
87 conv 256 1 x 1 / 1 26 x 26 x 768 -> 26 x 26 x 256 0.266 BFLOPs
88 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BFLOPs
89 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256 0.177 BFLOPs
90 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BFLOPs
91 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256 0.177 BFLOPs
92 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BFLOPs
93 conv 255 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 255 0.177 BFLOPs
94 yolo
95 route 91
96 conv 128 1 x 1 / 1 26 x 26 x 256 -> 26 x 26 x 128 0.044 BFLOPs
97 upsample 2x 26 x 26 x 128 -> 52 x 52 x 128
98 route 97 36
99 conv 128 1 x 1 / 1 52 x 52 x 384 -> 52 x 52 x 128 0.266 BFLOPs
100 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BFLOPs
101 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128 0.177 BFLOPs
102 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BFLOPs
103 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128 0.177 BFLOPs
104 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BFLOPs
105 conv 255 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 255 0.353 BFLOPs
106 yolo
Loading weights from /home/haowang/ros_yolo/src/darknet_ros/darknet_ros/yolo_network_config/weights/yolov3.weights...Done!
[ INFO] [1642407928.956632992]: -------Waiting for image from ZED2 Stereo Camera!!!.-------
[ INFO] [1642407930.956843390]: -------Waiting for image from ZED2 Stereo Camera!!!.-------
[ INFO] [1642407932.957070264]: -------Waiting for image from ZED2 Stereo Camera!!!.-------
[ INFO] [1642407934.957334925]: -------Waiting for image from ZED2 Stereo Camera!!!.-------
[ INFO] [1642407936.957608367]: -------Waiting for image from ZED2 Stereo Camera!!!.-------
[ INFO] [1642407938.957889356]: -------Waiting for image from ZED2 Stereo Camera!!!.-------
[ INFO] [1642407940.958177570]: -------Waiting for image from ZED2 Stereo Camera!!!.-------
[ INFO] [1642407942.958453255]: -------Waiting for image from ZED2 Stereo Camera!!!.-------
[ INFO] [1642407944.958727382]: -------Waiting for image from ZED2 Stereo Camera!!!.-------
[ INFO] [1642407946.959001860]: -------Waiting for image from ZED2 Stereo Camera!!!.-------
2. 启动ZED2 Stereo Vision 节点
roslaunch zed_wrapper zed2.launch
... logging to /home/haowang/.ros/log/04d19790-776f-11ec-9b47-1831bf95775e/roslaunch-haowang-codingspace-28103.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://haowang-codingspace.local:42127/
SUMMARY
========
PARAMETERS
* /rosdistro: melodic
* /rosversion: 1.14.10
* /zed2/zed2_description: <?xml version="1....
* /zed2/zed_node/auto_exposure_gain: True
* /zed2/zed_node/auto_whitebalance: True
* /zed2/zed_node/brightness: 4
* /zed2/zed_node/contrast: 4
* /zed2/zed_node/depth/depth_downsample_factor: 1.0
* /zed2/zed_node/depth/depth_stabilization: 1
* /zed2/zed_node/depth/max_depth: 20.0
* /zed2/zed_node/depth/min_depth: 0.2
* /zed2/zed_node/depth/openni_depth_mode: False
* /zed2/zed_node/depth/quality: 2
* /zed2/zed_node/depth/sensing_mode: 0
* /zed2/zed_node/depth_confidence: 50
* /zed2/zed_node/depth_texture_conf: 100
* /zed2/zed_node/exposure: 100
* /zed2/zed_node/gain: 100
* /zed2/zed_node/gamma: 8
* /zed2/zed_node/general/base_frame: base_link
* /zed2/zed_node/general/camera_flip: False
* /zed2/zed_node/general/camera_model: zed2
* /zed2/zed_node/general/camera_name: zed2
* /zed2/zed_node/general/gpu_id: -1
* /zed2/zed_node/general/grab_frame_rate: 60
* /zed2/zed_node/general/resolution: 1
* /zed2/zed_node/general/self_calib: True
* /zed2/zed_node/general/serial_number: 0
* /zed2/zed_node/general/svo_compression: 2
* /zed2/zed_node/general/verbose: True
* /zed2/zed_node/general/zed_id: 0
* /zed2/zed_node/hue: 0
* /zed2/zed_node/mapping/fused_pointcloud_freq: 1.0
* /zed2/zed_node/mapping/mapping_enabled: False
* /zed2/zed_node/mapping/max_mapping_range: -1
* /zed2/zed_node/mapping/resolution: 0.05
* /zed2/zed_node/object_detection/body_fitting: True
* /zed2/zed_node/object_detection/confidence_threshold: 50
* /zed2/zed_node/object_detection/max_range: 10.0
* /zed2/zed_node/object_detection/mc_animal: True
* /zed2/zed_node/object_detection/mc_bag: True
* /zed2/zed_node/object_detection/mc_electronics: True
* /zed2/zed_node/object_detection/mc_fruit_vegetable: True
* /zed2/zed_node/object_detection/mc_people: True
* /zed2/zed_node/object_detection/mc_vehicle: True
* /zed2/zed_node/object_detection/model: 1
* /zed2/zed_node/object_detection/object_tracking_enabled: True
* /zed2/zed_node/object_detection/od_enabled: False
* /zed2/zed_node/point_cloud_freq: 15.0
* /zed2/zed_node/pos_tracking/area_memory: True
* /zed2/zed_node/pos_tracking/area_memory_db_path:
* /zed2/zed_node/pos_tracking/fixed_z_value: 0.0
* /zed2/zed_node/pos_tracking/floor_alignment: False
* /zed2/zed_node/pos_tracking/imu_fusion: True
* /zed2/zed_node/pos_tracking/init_odom_with_first_valid_pose: True
* /zed2/zed_node/pos_tracking/initial_base_pose: [0.0, 0.0, 0.0, 0...
* /zed2/zed_node/pos_tracking/map_frame: map
* /zed2/zed_node/pos_tracking/odometry_frame: odom
* /zed2/zed_node/pos_tracking/path_max_count: -1
* /zed2/zed_node/pos_tracking/path_pub_rate: 2.0
* /zed2/zed_node/pos_tracking/publish_map_tf: True
* /zed2/zed_node/pos_tracking/publish_tf: True
* /zed2/zed_node/pos_tracking/two_d_mode: False
* /zed2/zed_node/pub_frame_rate: 15.0
* /zed2/zed_node/saturation: 4
* /zed2/zed_node/sensors/publish_imu_tf: True
* /zed2/zed_node/sensors/sensors_timestamp_sync: True
* /zed2/zed_node/sharpness: 4
* /zed2/zed_node/stream:
* /zed2/zed_node/svo_file:
* /zed2/zed_node/video/extrinsic_in_camera_frame: True
* /zed2/zed_node/video/img_downsample_factor: 1.0
* /zed2/zed_node/whitebalance_temperature: 42
NODES
/zed2/
zed2_state_publisher (robot_state_publisher/robot_state_publisher)
zed_node (zed_wrapper/zed_wrapper_node)
ROS_MASTER_URI=http://client.local:11311
process[zed2/zed2_state_publisher-1]: started with pid [28115]
process[zed2/zed_node-2]: started with pid [28116]
[ INFO] [1642408025.399845440]: Initializing nodelet with 6 worker threads.
[ INFO] [1642408025.422267286]: ********** Starting nodelet '/zed2/zed_node' **********
[ INFO] [1642408025.422327448]: SDK version : 3.6.1
[ INFO] [1642408025.422363595]: *** GENERAL PARAMETERS ***
[ INFO] [1642408025.423288932]: * Camera Name -> zed2
[ INFO] [1642408025.424275704]: * Camera Resolution -> HD1080
[ WARN] [1642408025.425278402]: Wrong FrameRate (60) for the resolution HD1080. Set to 30 FPS.
[ INFO] [1642408025.425303556]: * Camera Grab Framerate -> 30
[ INFO] [1642408025.426177953]: * Gpu ID -> -1
[ INFO] [1642408025.427005879]: * Camera ID -> -1
[ INFO] [1642408025.427843469]: * Verbose -> ENABLED
[ INFO] [1642408025.429736615]: * Camera Flip -> DISABLED
[ INFO] [1642408025.431730059]: * Self calibration -> ENABLED
[ INFO] [1642408025.433672255]: * Camera Model by param -> zed2
[ INFO] [1642408025.433759671]: *** VIDEO PARAMETERS ***
[ INFO] [1642408025.434838987]: * Image resample factor -> 1
[ INFO] [1642408025.436057454]: * Extrinsic param. frame -> X RIGHT - Y DOWN - Z FWD
[ INFO] [1642408025.436141213]: *** DEPTH PARAMETERS ***
[ INFO] [1642408025.437383594]: * Depth quality -> QUALITY
[ INFO] [1642408025.438547080]: * Depth Sensing mode -> STANDARD
[ INFO] [1642408025.439731887]: * OpenNI mode -> DISABLED
[ INFO] [1642408025.440940007]: * Depth Stabilization -> ENABLED
[ INFO] [1642408025.442152698]: * Minimum depth -> 0.2 m
[ INFO] [1642408025.443379562]: * Maximum depth -> 20 m
[ INFO] [1642408025.444616969]: * Depth resample factor -> 1
[ INFO] [1642408025.444700718]: *** POSITIONAL TRACKING PARAMETERS ***
[ INFO] [1642408025.445916370]: * Path rate -> 2 Hz
[ INFO] [1642408025.447151181]: * Path history size -> 1
[ INFO] [1642408025.449568291]: * Odometry DB path ->
[ INFO] [1642408025.451885226]: * Spatial Memory -> ENABLED
[ INFO] [1642408025.454200994]: * IMU Fusion -> ENABLED
[ INFO] [1642408025.456781711]: * Floor alignment -> DISABLED
[ INFO] [1642408025.459145578]: * Init Odometry with first valid pose data -> ENABLED
[ INFO] [1642408025.461469916]: * Two D mode -> DISABLED
[ INFO] [1642408025.463830145]: *** MAPPING PARAMETERS ***
[ INFO] [1642408025.466178072]: * Mapping -> DISABLED
[ INFO] [1642408025.466268145]: *** OBJECT DETECTION PARAMETERS ***
[ INFO] [1642408025.468446041]: * Object Detection -> DISABLED
[ INFO] [1642408025.468531911]: *** SENSORS PARAMETERS ***
[ INFO] [1642408025.469734198]: * Sensors timestamp sync -> ENABLED
[ INFO] [1642408025.469876845]: *** SVO PARAMETERS ***
[ INFO] [1642408025.472118177]: * SVO input file: ->
[ INFO] [1642408025.473269878]: * SVO REC compression -> H265 (HEVC)
[ INFO] [1642408025.475582927]: *** COORDINATE FRAMES ***
[ INFO] [1642408025.483561896]: * map_frame -> map
[ INFO] [1642408025.483638792]: * odometry_frame -> odom
[ INFO] [1642408025.483682849]: * base_frame -> base_link
[ INFO] [1642408025.483722161]: * camera_frame -> zed2_camera_center
[ INFO] [1642408025.483776249]: * imu_link -> zed2_imu_link
[ INFO] [1642408025.483840027]: * left_camera_frame -> zed2_left_camera_frame
[ INFO] [1642408025.483878055]: * left_camera_optical_frame -> zed2_left_camera_optical_frame
[ INFO] [1642408025.483913053]: * right_camera_frame -> zed2_right_camera_frame
[ INFO] [1642408025.483963049]: * right_camera_optical_frame -> zed2_right_camera_optical_frame
[ INFO] [1642408025.484005989]: * depth_frame -> zed2_left_camera_frame
[ INFO] [1642408025.484043279]: * depth_optical_frame -> zed2_left_camera_optical_frame
[ INFO] [1642408025.484079685]: * disparity_frame -> zed2_left_camera_frame
[ INFO] [1642408025.484124033]: * disparity_optical_frame -> zed2_left_camera_optical_frame
[ INFO] [1642408025.484166834]: * confidence_frame -> zed2_left_camera_frame
[ INFO] [1642408025.484201334]: * confidence_optical_frame -> zed2_left_camera_optical_frame
[ INFO] [1642408025.486398158]: * Broadcast odometry TF -> ENABLED
[ INFO] [1642408025.488692236]: * Broadcast map pose TF -> ENABLED
[ INFO] [1642408025.490610845]: * Broadcast IMU pose TF -> ENABLED
[ INFO] [1642408025.490694880]: *** DYNAMIC PARAMETERS (Init. values) ***
[ INFO] [1642408025.491635163]: * [DYN] Depth confidence -> 50
[ INFO] [1642408025.492665706]: * [DYN] Depth texture conf. -> 100
[ INFO] [1642408025.493635127]: * [DYN] pub_frame_rate -> 15 Hz
[ INFO] [1642408025.494585331]: * [DYN] point_cloud_freq -> 15 Hz
[ INFO] [1642408025.495369518]: * [DYN] brightness -> 4
[ INFO] [1642408025.496205936]: * [DYN] contrast -> 4
[ INFO] [1642408025.497047785]: * [DYN] hue -> 0
[ INFO] [1642408025.497878577]: * [DYN] saturation -> 4
[ INFO] [1642408025.498689662]: * [DYN] sharpness -> 4
[ INFO] [1642408025.499498820]: * [DYN] gamma -> 8
[ INFO] [1642408025.500326833]: * [DYN] auto_exposure_gain -> ENABLED
[ INFO] [1642408025.502477835]: * [DYN] auto_whitebalance -> ENABLED
[ INFO] [1642408025.518537331]: * Camera coordinate system -> Right HANDED Z UP and X FORWARD
[ INFO] [1642408025.518588252]: *** Opening ZED 2...
[ZED][Init] Depth mode: QUALITY
[ZED][Init][Info] Camera successfully opened.
[ZED][Init][Info] Camera FW version: 1523
[ZED][Init] Video mode: HD1080@30
[ INFO] [1642408026.645913987]: ZED connection -> SUCCESS
[ INFO] [1642408028.646148497]: ... ZED ready
[ INFO] [1642408028.646213438]: ZED SDK running on GPU #0
[ INFO] [1642408028.656629645]: Camera-IMU Transform:
55B194294238
0.999999 0.001390 -0.000203 -0.002000
-0.001390 0.999999 -0.000138 -0.023000
0.000203 0.000138 1.000000 0.000220
0.000000 0.000000 0.000000 1.000000
[ INFO] [1642408028.656666430]: * CAMERA MODEL -> ZED 2
[ INFO] [1642408028.656694025]: * Serial Number -> 27871166
[ INFO] [1642408028.656716786]: * Camera FW Version -> 1523
[ INFO] [1642408028.656741142]: * Sensors FW Version -> 776
[ INFO] [1642408028.846837999]: Advertised on topic /zed2/zed_node/rgb/image_rect_color
[ INFO] [1642408028.846882228]: Advertised on topic /zed2/zed_node/rgb/camera_info
[ INFO] [1642408028.870273275]: Advertised on topic /zed2/zed_node/rgb_raw/image_raw_color
[ INFO] [1642408028.870303949]: Advertised on topic /zed2/zed_node/rgb_raw/camera_info
[ INFO] [1642408028.888646818]: Advertised on topic /zed2/zed_node/left/image_rect_color
[ INFO] [1642408028.888672364]: Advertised on topic /zed2/zed_node/left/camera_info
[ INFO] [1642408028.908416892]: Advertised on topic /zed2/zed_node/left_raw/image_raw_color
[ INFO] [1642408028.908447889]: Advertised on topic /zed2/zed_node/left_raw/camera_info
[ INFO] [1642408028.926166239]: Advertised on topic /zed2/zed_node/right/image_rect_color
[ INFO] [1642408028.926195337]: Advertised on topic /zed2/zed_node/right/camera_info
[ INFO] [1642408028.946693004]: Advertised on topic /zed2/zed_node/right_raw/image_raw_color
[ INFO] [1642408028.946728038]: Advertised on topic /zed2/zed_node/right_raw/camera_info
[ INFO] [1642408028.963212944]: Advertised on topic /zed2/zed_node/rgb/image_rect_gray
[ INFO] [1642408028.963241909]: Advertised on topic /zed2/zed_node/rgb/camera_info
[ INFO] [1642408028.978297491]: Advertised on topic /zed2/zed_node/rgb_raw/image_raw_gray
[ INFO] [1642408028.978336841]: Advertised on topic /zed2/zed_node/rgb_raw/camera_info
[ INFO] [1642408029.002711006]: Advertised on topic /zed2/zed_node/left/image_rect_gray
[ INFO] [1642408029.002775663]: Advertised on topic /zed2/zed_node/left/camera_info
[ INFO] [1642408029.035291443]: Advertised on topic /zed2/zed_node/left_raw/image_raw_gray
[ INFO] [1642408029.035448071]: Advertised on topic /zed2/zed_node/left_raw/camera_info
[ INFO] [1642408029.063976283]: Advertised on topic /zed2/zed_node/right/image_rect_gray
[ INFO] [1642408029.064030387]: Advertised on topic /zed2/zed_node/right/camera_info
[ INFO] [1642408029.093318985]: Advertised on topic /zed2/zed_node/right_raw/image_raw_gray
[ INFO] [1642408029.093363890]: Advertised on topic /zed2/zed_node/right_raw/camera_info
[ INFO] [1642408029.121704529]: Advertised on topic /zed2/zed_node/depth/depth_registered
[ INFO] [1642408029.121762887]: Advertised on topic /zed2/zed_node/depth/camera_info
[ INFO] [1642408029.149151538]: Advertised on topic /zed2/zed_node/stereo/image_rect_color
[ INFO] [1642408029.180354179]: Advertised on topic /zed2/zed_node/stereo_raw/image_raw_color
[ INFO] [1642408029.181378660]: Advertised on topic /zed2/zed_node/confidence/confidence_map
[ INFO] [1642408029.182372924]: Advertised on topic /zed2/zed_node/disparity/disparity_image
[ INFO] [1642408029.183270146]: Advertised on topic /zed2/zed_node/point_cloud/cloud_registered
[ INFO] [1642408029.184234924]: Advertised on topic /zed2/zed_node/pose
[ INFO] [1642408029.185424002]: Advertised on topic /zed2/zed_node/pose_with_covariance
[ INFO] [1642408029.186659760]: Advertised on topic /zed2/zed_node/odom
[ INFO] [1642408029.187682368]: Advertised on topic /zed2/zed_node/path_odom
[ INFO] [1642408029.188663773]: Advertised on topic /zed2/zed_node/path_map
[ INFO] [1642408029.189737113]: Advertised on topic /zed2/zed_node/imu/data
[ INFO] [1642408029.191144283]: Advertised on topic /zed2/zed_node/imu/data_raw
[ INFO] [1642408029.192096805]: Advertised on topic /zed2/zed_node/imu/mag
[ INFO] [1642408029.193292445]: Advertised on topic /zed2/zed_node/temperature/imu
[ INFO] [1642408029.194552760]: Advertised on topic /zed2/zed_node/atm_press
[ INFO] [1642408029.195651895]: Advertised on topic /zed2/zed_node/temperature/left
[ INFO] [1642408029.196559825]: Advertised on topic /zed2/zed_node/temperature/right
[ INFO] [1642408029.197519504]: Advertised on topic /zed2/zed_node/left_cam_imu_transform [LATCHED]
3. Topic list
/darknet_ros/bounding_boxes
/darknet_ros/check_for_objects/cancel
/darknet_ros/check_for_objects/feedback
/darknet_ros/check_for_objects/goal
/darknet_ros/check_for_objects/result
/darknet_ros/check_for_objects/status
/darknet_ros/detection_image
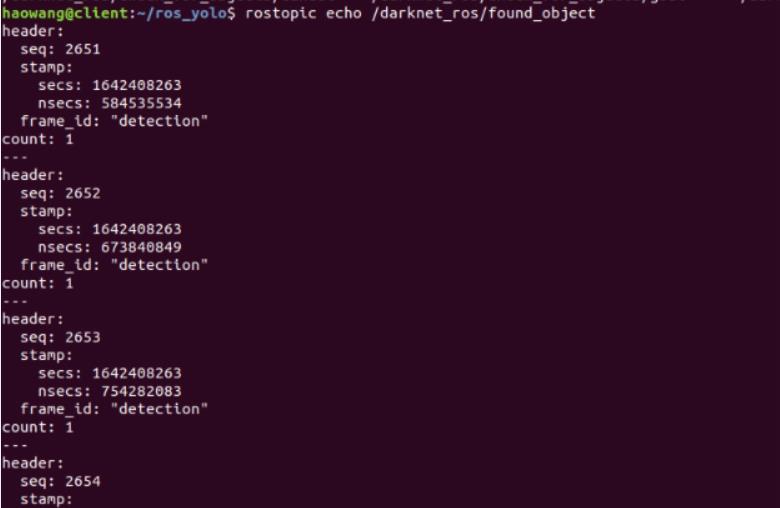
/darknet_ros/found_object
/diagnostics
/image_view/output
/image_view/parameter_descriptions
/image_view/parameter_updates
/rosout
/rosout_agg
/tf
/tf_static
/zed2/joint_states
/zed2/zed_node/atm_press
/zed2/zed_node/confidence/confidence_map
/zed2/zed_node/depth/camera_info
/zed2/zed_node/depth/depth_registered
/zed2/zed_node/depth/depth_registered/compressed
/zed2/zed_node/depth/depth_registered/compressed/parameter_descriptions
/zed2/zed_node/depth/depth_registered/compressed/parameter_updates
/zed2/zed_node/depth/depth_registered/compressedDepth
/zed2/zed_node/depth/depth_registered/compressedDepth/parameter_descriptions
/zed2/zed_node/depth/depth_registered/compressedDepth/parameter_updates
/zed2/zed_node/depth/depth_registered/theora
/zed2/zed_node/depth/depth_registered/theora/parameter_descriptions
/zed2/zed_node/depth/depth_registered/theora/parameter_updates
/zed2/zed_node/disparity/disparity_image
/zed2/zed_node/imu/data
/zed2/zed_node/imu/data_raw
/zed2/zed_node/imu/mag
/zed2/zed_node/left/camera_info
/zed2/zed_node/left/image_rect_color
/zed2/zed_node/left/image_rect_color/compressed
/zed2/zed_node/left/image_rect_color/compressed/parameter_descriptions
/zed2/zed_node/left/image_rect_color/compressed/parameter_updates
/zed2/zed_node/left/image_rect_color/compressedDepth
/zed2/zed_node/left/image_rect_color/compressedDepth/parameter_descriptions
/zed2/zed_node/left/image_rect_color/compressedDepth/parameter_updates
/zed2/zed_node/left/image_rect_color/theora
/zed2/zed_node/left/image_rect_color/theora/parameter_descriptions
/zed2/zed_node/left/image_rect_color/theora/parameter_updates
/zed2/zed_node/left/image_rect_gray
/zed2/zed_node/left/image_rect_gray/compressed
/zed2/zed_node/left/image_rect_gray/compressed/parameter_descriptions
/zed2/zed_node/left/image_rect_gray/compressed/parameter_updates
/zed2/zed_node/left/image_rect_gray/compressedDepth
/zed2/zed_node/left/image_rect_gray/compressedDepth/parameter_descriptions
/zed2/zed_node/left/image_rect_gray/compressedDepth/parameter_updates
/zed2/zed_node/left/image_rect_gray/theora
/zed2/zed_node/left/image_rect_gray/theora/parameter_descriptions
/zed2/zed_node/left/image_rect_gray/theora/parameter_updates
/zed2/zed_node/left_cam_imu_transform
/zed2/zed_node/left_raw/camera_info
/zed2/zed_node/left_raw/image_raw_color
/zed2/zed_node/left_raw/image_raw_color/compressed
/zed2/zed_node/left_raw/image_raw_color/compressed/parameter_descriptions
/zed2/zed_node/left_raw/image_raw_color/compressed/parameter_updates
/zed2/zed_node/left_raw/image_raw_color/compressedDepth
/zed2/zed_node/left_raw/image_raw_color/compressedDepth/parameter_descriptions
/zed2/zed_node/left_raw/image_raw_color/compressedDepth/parameter_updates
/zed2/zed_node/left_raw/image_raw_color/theora
/zed2/zed_node/left_raw/image_raw_color/theora/parameter_descriptions
/zed2/zed_node/left_raw/image_raw_color/theora/parameter_updates
/zed2/zed_node/left_raw/image_raw_gray
/zed2/zed_node/left_raw/image_raw_gray/compressed
/zed2/zed_node/left_raw/image_raw_gray/compressed/parameter_descriptions
/zed2/zed_node/left_raw/image_raw_gray/compressed/parameter_updates
/zed2/zed_node/left_raw/image_raw_gray/compressedDepth
/zed2/zed_node/left_raw/image_raw_gray/compressedDepth/parameter_descriptions
/zed2/zed_node/left_raw/image_raw_gray/compressedDepth/parameter_updates
/zed2/zed_node/left_raw/image_raw_gray/theora
/zed2/zed_node/left_raw/image_raw_gray/theora/parameter_descriptions
/zed2/zed_node/left_raw/image_raw_gray/theora/parameter_updates
/zed2/zed_node/odom
/zed2/zed_node/parameter_descriptions
/zed2/zed_node/parameter_updates
/zed2/zed_node/path_map
/zed2/zed_node/path_odom
/zed2/zed_node/point_cloud/cloud_registered
/zed2/zed_node/pose
/zed2/zed_node/pose_with_covariance
/zed2/zed_node/rgb/camera_info
/zed2/zed_node/rgb/image_rect_color
/zed2/zed_node/rgb/image_rect_color/compressed
/zed2/zed_node/rgb/image_rect_color/compressed/parameter_descriptions
/zed2/zed_node/rgb/image_rect_color/compressed/parameter_updates
/zed2/zed_node/rgb/image_rect_color/compressedDepth
/zed2/zed_node/rgb/image_rect_color/compressedDepth/parameter_descriptions
/zed2/zed_node/rgb/image_rect_color/compressedDepth/parameter_updates
/zed2/zed_node/rgb/image_rect_color/theora
/zed2/zed_node/rgb/image_rect_color/theora/parameter_descriptions
/zed2/zed_node/rgb/image_rect_color/theora/parameter_updates
/zed2/zed_node/rgb/image_rect_gray
/zed2/zed_node/rgb/image_rect_gray/compressed
/zed2/zed_node/rgb/image_rect_gray/compressed/parameter_descriptions
/zed2/zed_node/rgb/image_rect_gray/compressed/parameter_updates
/zed2/zed_node/rgb/image_rect_gray/compressedDepth
/zed2/zed_node/rgb/image_rect_gray/compressedDepth/parameter_descriptions
/zed2/zed_node/rgb/image_rect_gray/compressedDepth/parameter_updates
/zed2/zed_node/rgb/image_rect_gray/theora
/zed2/zed_node/rgb/image_rect_gray/theora/parameter_descriptions
/zed2/zed_node/rgb/image_rect_gray/theora/parameter_updates
/zed2/zed_node/rgb_raw/camera_info
/zed2/zed_node/rgb_raw/image_raw_color
/zed2/zed_node/rgb_raw/image_raw_color/compressed
/zed2/zed_node/rgb_raw/image_raw_color/compressed/parameter_descriptions
/zed2/zed_node/rgb_raw/image_raw_color/compressed/parameter_updates
/zed2/zed_node/rgb_raw/image_raw_color/compressedDepth
/zed2/zed_node/rgb_raw/image_raw_color/compressedDepth/parameter_descriptions
/zed2/zed_node/rgb_raw/image_raw_color/compressedDepth/parameter_updates
/zed2/zed_node/rgb_raw/image_raw_color/theora
/zed2/zed_node/rgb_raw/image_raw_color/theora/parameter_descriptions
/zed2/zed_node/rgb_raw/image_raw_color/theora/parameter_updates
/zed2/zed_node/rgb_raw/image_raw_gray
/zed2/zed_node/rgb_raw/image_raw_gray/compressed
/zed2/zed_node/rgb_raw/image_raw_gray/compressed/parameter_descriptions
/zed2/zed_node/rgb_raw/image_raw_gray/compressed/parameter_updates
/zed2/zed_node/rgb_raw/image_raw_gray/compressedDepth
/zed2/zed_node/rgb_raw/image_raw_gray/compressedDepth/parameter_descriptions
/zed2/zed_node/rgb_raw/image_raw_gray/compressedDepth/parameter_updates
/zed2/zed_node/rgb_raw/image_raw_gray/theora
/zed2/zed_node/rgb_raw/image_raw_gray/theora/parameter_descriptions
/zed2/zed_node/rgb_raw/image_raw_gray/theora/parameter_updates
/zed2/zed_node/right/camera_info
/zed2/zed_node/right/image_rect_color
/zed2/zed_node/right/image_rect_color/compressed
/zed2/zed_node/right/image_rect_color/compressed/parameter_descriptions
/zed2/zed_node/right/image_rect_color/compressed/parameter_updates
/zed2/zed_node/right/image_rect_color/compressedDepth
/zed2/zed_node/right/image_rect_color/compressedDepth/parameter_descriptions
/zed2/zed_node/right/image_rect_color/compressedDepth/parameter_updates
/zed2/zed_node/right/image_rect_color/theora
/zed2/zed_node/right/image_rect_color/theora/parameter_descriptions
/zed2/zed_node/right/image_rect_color/theora/parameter_updates
/zed2/zed_node/right/image_rect_gray
/zed2/zed_node/right/image_rect_gray/compressed
/zed2/zed_node/right/image_rect_gray/compressed/parameter_descriptions
/zed2/zed_node/right/image_rect_gray/compressed/parameter_updates
/zed2/zed_node/right/image_rect_gray/compressedDepth
/zed2/zed_node/right/image_rect_gray/compressedDepth/parameter_descriptions
/zed2/zed_node/right/image_rect_gray/compressedDepth/parameter_updates
/zed2/zed_node/right/image_rect_gray/theora
/zed2/zed_node/right/image_rect_gray/theora/parameter_descriptions
/zed2/zed_node/right/image_rect_gray/theora/parameter_updates
/zed2/zed_node/right_raw/camera_info
/zed2/zed_node/right_raw/image_raw_color
/zed2/zed_node/right_raw/image_raw_color/compressed
/zed2/zed_node/right_raw/image_raw_color/compressed/parameter_descriptions
/zed2/zed_node/right_raw/image_raw_color/compressed/parameter_updates
/zed2/zed_node/right_raw/image_raw_color/compressedDepth
/zed2/zed_node/right_raw/image_raw_color/compressedDepth/parameter_descriptions
/zed2/zed_node/right_raw/image_raw_color/compressedDepth/parameter_updates
/zed2/zed_node/right_raw/image_raw_color/theora
/zed2/zed_node/right_raw/image_raw_color/theora/parameter_descriptions
/zed2/zed_node/right_raw/image_raw_color/theora/parameter_updates
/zed2/zed_node/right_raw/image_raw_gray
/zed2/zed_node/right_raw/image_raw_gray/compressed
/zed2/zed_node/right_raw/image_raw_gray/compressed/parameter_descriptions
/zed2/zed_node/right_raw/image_raw_gray/compressed/parameter_updates
/zed2/zed_node/right_raw/image_raw_gray/compressedDepth
/zed2/zed_node/right_raw/image_raw_gray/compressedDepth/parameter_descriptions
/zed2/zed_node/right_raw/image_raw_gray/compressedDepth/parameter_updates
/zed2/zed_node/right_raw/image_raw_gray/theora
/zed2/zed_node/right_raw/image_raw_gray/theora/parameter_descriptions
/zed2/zed_node/right_raw/image_raw_gray/theora/parameter_updates
/zed2/zed_node/stereo/image_rect_color
/zed2/zed_node/stereo/image_rect_color/compressed
/zed2/zed_node/stereo/image_rect_color/compressed/parameter_descriptions
/zed2/zed_node/stereo/image_rect_color/compressed/parameter_updates
/zed2/zed_node/stereo/image_rect_color/compressedDepth
/zed2/zed_node/stereo/image_rect_color/compressedDepth/parameter_descriptions
/zed2/zed_node/stereo/image_rect_color/compressedDepth/parameter_updates
/zed2/zed_node/stereo/image_rect_color/theora
/zed2/zed_node/stereo/image_rect_color/theora/parameter_descriptions
/zed2/zed_node/stereo/image_rect_color/theora/parameter_updates
/zed2/zed_node/stereo_raw/image_raw_color
/zed2/zed_node/stereo_raw/image_raw_color/compressed
/zed2/zed_node/stereo_raw/image_raw_color/compressed/parameter_descriptions
/zed2/zed_node/stereo_raw/image_raw_color/compressed/parameter_updates
/zed2/zed_node/stereo_raw/image_raw_color/compressedDepth
/zed2/zed_node/stereo_raw/image_raw_color/compressedDepth/parameter_descriptions
/zed2/zed_node/stereo_raw/image_raw_color/compressedDepth/parameter_updates
/zed2/zed_node/stereo_raw/image_raw_color/theora
/zed2/zed_node/stereo_raw/image_raw_color/theora/parameter_descriptions
/zed2/zed_node/stereo_raw/image_raw_color/theora/parameter_updates
/zed2/zed_node/temperature/imu
/zed2/zed_node/temperature/left
/zed2/zed_node/temperature/right
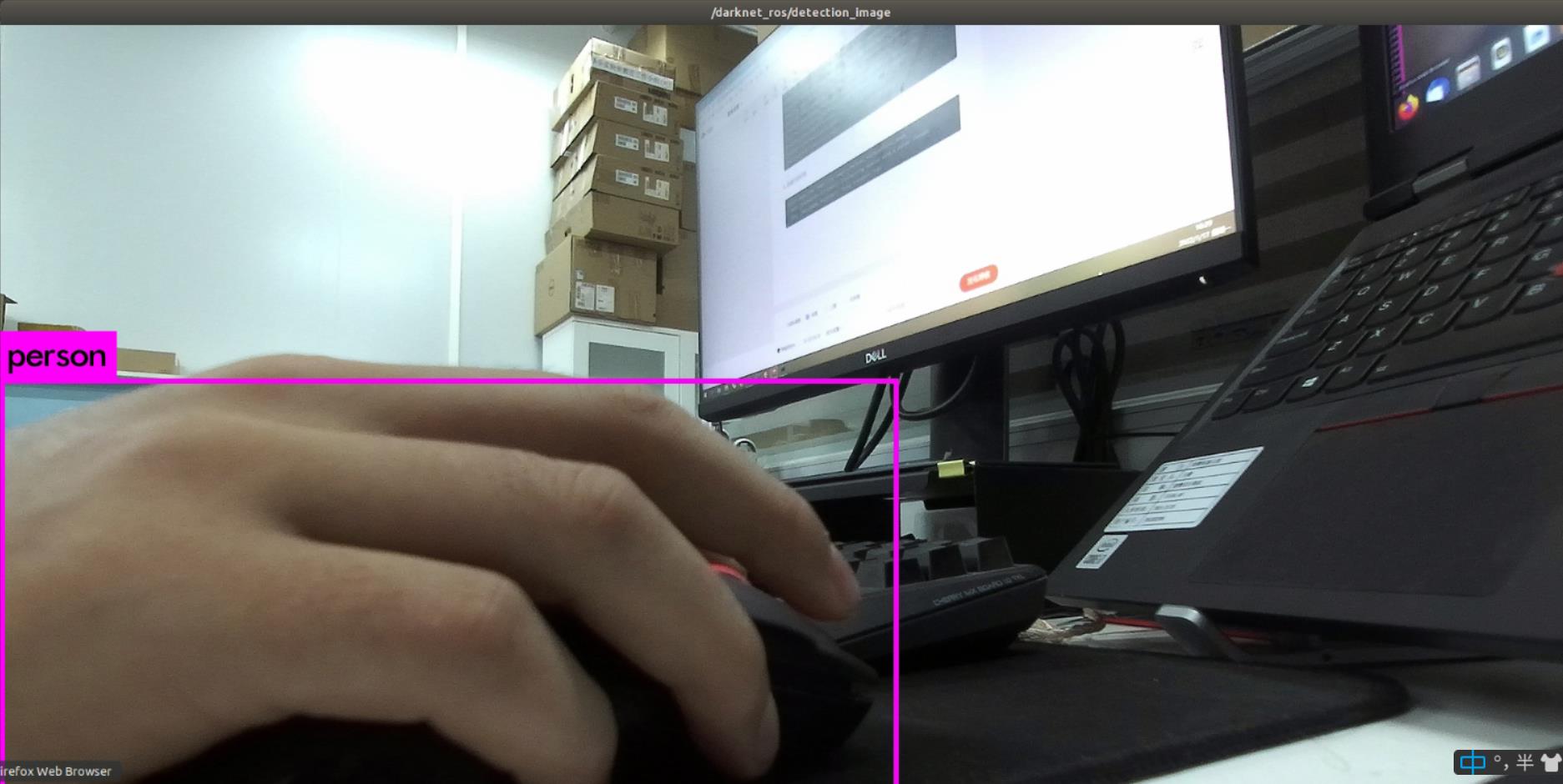
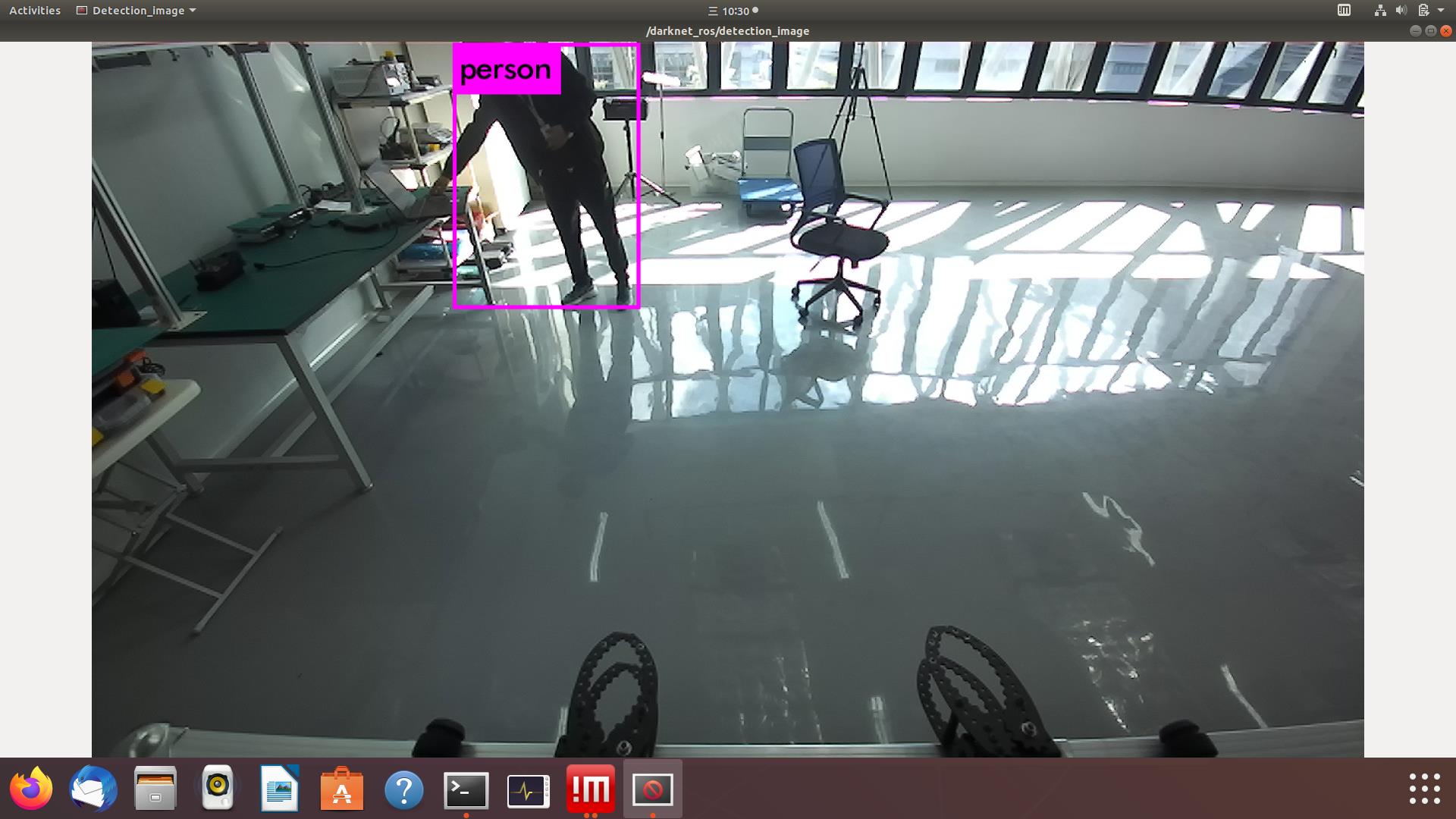
4. 查看识别结果
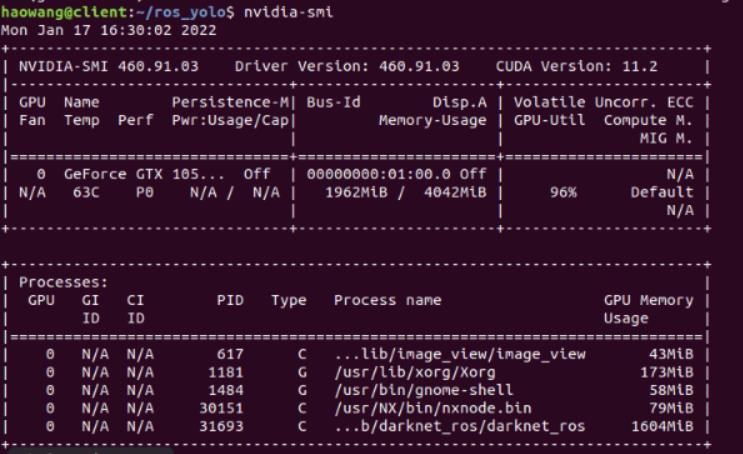
笔记本显卡占用96%
以上是关于飞行机器人--- ZED2& YOLO &ROS第一视角目标检测的主要内容,如果未能解决你的问题,请参考以下文章