图像处理一百题(11-20)
Posted 狗蛋儿l
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了图像处理一百题(11-20)相关的知识,希望对你有一定的参考价值。
问题十一:均值滤波器
使用3*3的均值滤波器来进行滤波吧!
平滑线性空间滤波器的输出是包含在滤波器模板邻域内的像素的简单平均值,也就是均值滤波器。均值滤波器也是低通滤波器,均值滤波器很容易理解,即把邻域内的平均值赋给中心元素。
均值滤波器用来降低噪声,均值滤波器的主要应用是去除图像中的不相关细节,不相关是指与滤波器的模板相比较小的像素区域。模糊图片以便得到感兴趣物体的粗略描述,因此那些较小的物体的灰度就会与背景混合在一起,较大的物体则变的像斑点而易于检测。模板的大小由那些即将融入背景中的物体尺寸决定。
import cv2
import numpy as np
# mean filter
def mean_filter(img, K_size=3):
H, W, C = img.shape
# zero padding
pad = K_size // 2
out = np.zeros((H + pad * 2, W + pad * 2, C), dtype=np.float)
out[pad: pad + H, pad: pad + W] = img.copy().astype(np.float)
tmp = out.copy()
# filtering
for y in range(H):
for x in range(W):
for c in range(C):
out[pad + y, pad + x, c] = np.mean(tmp[y: y + K_size, x: x + K_size, c])
out = out[pad: pad + H, pad: pad + W].astype(np.uint8)
return out
# Read image
img = cv2.imread("jiaoyan.jpg")
# Mean Filter
out = mean_filter(img, K_size=3)
# Save result
cv2.imwrite("out.jpg", out)
cv2.imshow("result", out)
cv2.waitKey(0)
cv2.destroyAllWindows()
原图像
处理后图像

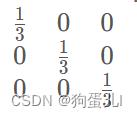
问题十二:Motion Filter
Motion Filter取对角线方向的像素的平均值,像下式这样定义:
import cv2
import numpy as np
# motion filter
def motion_filter(img, K_size=3):
H, W, C = img.shape
# Kernel
K = np.diag( [1] * K_size ).astype(np.float)
K /= K_size
# zero padding
pad = K_size // 2
out = np.zeros((H + pad * 2, W + pad * 2, C), dtype=np.float)
out[pad: pad + H, pad: pad + W] = img.copy().astype(np.float)
tmp = out.copy()
# filtering
for y in range(H):
for x in range(W):
for c in range(C):
out[pad + y, pad + x, c] = np.sum(K * tmp[y: y + K_size, x: x + K_size, c])
out = out[pad: pad + H, pad: pad + W].astype(np.uint8)
return out
# Read image
img = cv2.imread("jiaoyan.jpg")
# motion filtering
out = motion_filter(img, K_size=3)
# Save result
cv2.imwrite("out.jpg", out)
cv2.imshow("result", out)
cv2.waitKey(0)
cv2.destroyAllWindows()

以上是关于图像处理一百题(11-20)的主要内容,如果未能解决你的问题,请参考以下文章