探索深海生态系统和冰卫星的协同作用-深海机器人开发与空间技术合作
Posted xiaokcehui
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了探索深海生态系统和冰卫星的协同作用-深海机器人开发与空间技术合作相关的知识,希望对你有一定的参考价值。
近年来,地球和地外海洋研究越来越多地联合起来,将地球和空间海洋系统探索的专业知识和技术解决方案融合在一起。这些技术方案包括机器人应用、自主性和传感器集成以及数据分析。
仿生设计、人工智能平台(人工智能)和生命追踪传感器包协同作用将应用于监测地球上环境脆弱的地方,如冷水珊瑚礁、渔场以及退役地。离岸的海洋科学和工业基础设施可以为机器人和传感器开发提供创新的试验床。
深海机器人和冰卫星
海洋和空间海洋研究主要侧重于基于卫星和浮标的监测。然而,机器人设计、自主性和传感器集成方面的最新进展正在为探索深海水层和海底环境创造解决方案,这些解决方案可转移到冰质卫星土卫二和木卫二的广阔地外海洋。就压力、重力和依赖地热的活动、内部潮汐隆起和持续黑暗而言,这些水体与陆地海洋系统相似,也同样存在热液喷口活动(如伽利略、卡西尼-惠更斯和哈勃空间望远镜空间任务所揭示的)。冰面上的裂缝是冰火山活动时喷出的大型间歇泉的产物;换句话说,高压和强大的地温梯度产生了大量的热水,这些热水通过冰盖的裂缝和裂隙被输送到地表。由于压力突然降低,水一旦出现在太空中,就会突然蒸发并冻结,以雪的形式落回地表。
探索冰卫星上的生命被认为是航空机构强力推动的结果。深海机器人的最新发展也将作出贡献,这反过来又可能受益于航空研究解决方案。例如,目前用于深海生态系统研究的基于光声学、被动声学和组学(Edna)的成套传感器可能是对细菌及更大的地外海洋假定生命进行生物勘探的现成解决方案。考虑到地外海洋存在和喷发活动的地质时间框架(与地球上的相当),一个大胆的想法是外星生物可能也有巨型的,且在某种程度上具有形态相似性(即不同系统发育起源的物种是相似的,因为它们对共同的压力做出了反应)。地外动物群可能有类似于我们海洋门类中固着和活动生物,如多孔动物门(海绵)、节肢动物门(如甲壳类动物)、软体动物门(如章鱼)、刺胞动物纲(珊瑚和水母)、蠕虫纲(蠕虫),以及脊索动物纲(如鱼类)。
地外海洋勘探技术复杂,远高于深海勘探。未来几十年,平台和传感器有效载荷限制其在地外海洋勘探中的使用。大型冰盖的穿透将需要机器人(如穿冰机器人),它能挖掘数公里长的隧道。本文介绍了深海机器人的未来发展与航空技术有关的三个主要研究领域:仿生结构和能量设计、人工智能和生命跟踪传感器技术的微型化。
仿生结构与能源设计
深海区域和地外海洋等极端环境的探索需要创新平台。这些平台采用传统设备(如AUV、履带和漫游车)以外的运动模式,为更长时间的自主任务提供能源,并升级合作行为(即单位组,以最大限度地提高任务效率)。
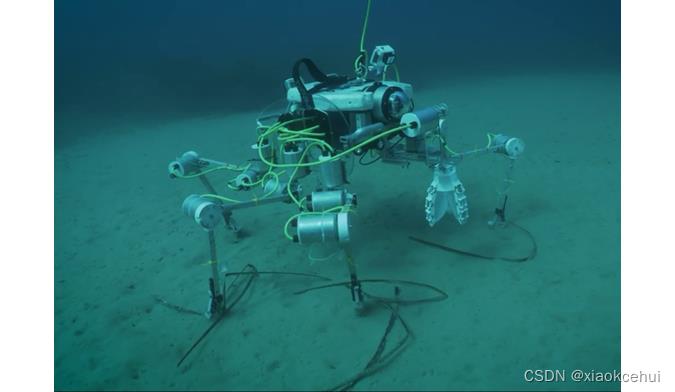
具有类似节肢动物灵活运动的仿生腿平台,极大地增强在不规则地形(如热液喷口区域)上的机动性。这些平台也可固定在基底上,使用它们的肢体进行感知。使用密度接近海水的新型轻软质材料适应动态变化环境、崎岖地形和高压。
与机器人自主相关的另一个主要挑战是能源供应。目前重点是开发高效的大型电池或氢源物,例如过氧化氢 (H2O2) 燃料电池。就像生物体依赖于通过生物过程产生能量,人工新陈代谢能提供可再生的能源,例如处理基质(类似进食的功能),这也可能对空间探索有潜在的好处。但根据空间研究委员会(COSPAR)的污染协议,新一代能量自生的微生物燃料电池会对空间任务构成了威胁。在不久的将来,基于人工智能的逆向工程方法会去除细菌成分并推断生化反应路线。
自主任务和数据处理的人工智能平台
自主机器人海洋平台的操作过程是:人类操作员向车辆发送固定命令,车辆执行这些命令并将获取的数据传输到船舶或海岸。然而,随着海洋深度不断增加,这变得越来越不可行的,更不用说在地外海洋场景中。因此,在数据传输受到限制的操作环境中(例如海洋深处、屏蔽冰盖、天体以及其它极远距离),长期任务的关键在于人工智能和长期自主性。导航和轨迹规划、自适应采样和感知以及实时处理和汇总大量异构数据都需要人工智能升级。独立于远程计算资源,实时控制传感器和执行基于内容的数据解释算法的硬件架构是边缘计算范式的核心。
例如,当声学超短基线(USBL)和单个信标信号不能用于定位时,使用相对地形和即时定位与地图构建 (SLAM) 方法来辅助导航。它们的优点是独立于任何外部基础设施,但是本地坐标最终仍然要与全局坐标统一。深海操作试验台对于开发和完善用于外海的强大导航解决方案至关重要。
此外,随着海洋机器人平台获得大量的异构数据,自主数据处理迫在眉睫。人工智能必须能够检测和提取有用的信息,以减少内存存储并简化通信活动。同时它们能自主地解释这些信息为什么是相关的以及如何从数据中提取的。在对环境特征没有先验科学认识的情况下,开发自主车载数据解释和自主选择车辆用来自主采样/遥感。在这种情况下,对感兴趣的目标特征进行自适应在线探索的方法被用来根据先前观察的历史自主证明新的观察结果。
生命追踪传感器组
在天体生物学方面,集成传感器有效载荷的工作目前主要集中在微生物上,构想将分子分析与液体样品的显微成像和光谱分析相结合。受深海启发的技术发展可能有助于将天体生物学研究的重点从微细胞生物转移到多细胞和大型生物。
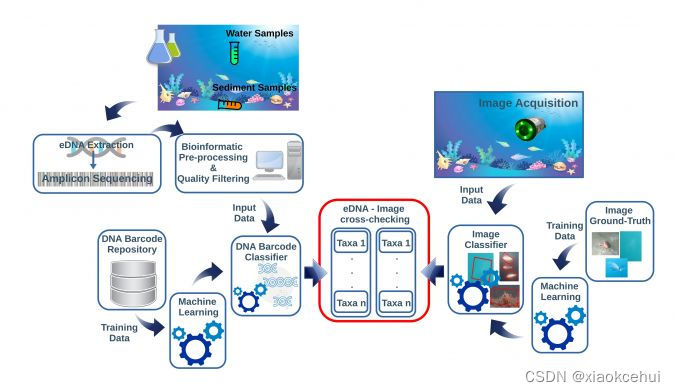
海洋研究正在开发用于追踪环境DNA/RNA (eDNA/eRNA)的组学传感器,而地外海洋领域正在开发直接和间接检测环境核苷替代结构的方法,如异种核酸 (eXNA)。这为创建能够在极端环境(如热液喷口)中寻找生命迹象的原位组学传感器铺平了道路。这种深海生命追踪能力将越来越多地将图像和分子传感器技术结合到高度集成的有效载荷中(图2)。在不久的将来,这种发展将与原位微流体取样能力相融合。微流体传感器是真正的分子实验室。目前,原位微流体采样能力在海洋介质中还远未实现,但它们与在冰冷的卫星上识别冰壳和地外海洋中的生命有关。这样的传感器被组装用于检测分子(例如氨基酸)、生物聚合物(例如作为生命的通用标记的脂质和作为光合活性的替代物的碳水化合物)或核酸,使用与磁性粒子和单通道结构纳米孔集成的协议测序。
结论:迈向新一类蓝色服务
在海洋生态系统恢复的十年中,环境探测和监测技术日益占据中心位置。将海洋技术与空间机器人探索解决方案相结合,监测和监视环境脆弱的栖息地(如冷水珊瑚礁)或石油和天然气平台退役地点。机器人和传感器在这三个主要研究主题内形成了一个新的对话框架,产生一种新的蓝色服务。例如,离岸工业从用于监控和维护其基础设施的机器人开发中受益匪浅大大受益。同时,海洋科学和工业近海基础设施可以为机器人和传感器开发提供创新的试验台服务。

The Synergies of Exploring Deep-sea Ecosystems and Icy Moons
Deep-sea Robotics Development and Space Technology Cooperation
By Jacopo Aguzzi, Giacomo Picardi, Sergio Stefanni, Sascha Flögel • April 5, 2022
during recent years, terrestrial and extraterrestrial ocean research have increasingly joined forces to merge expertise and technical solutions in the exploration of marine systems on Earth and in space. This includes solutions for robotic applications, autonomy and sensor integration, as well as data analysis.
These synergies in biomimetic design, platform artificial intelligence (AI) and life-tracing sensor packages will be applied to the monitoring and surveillance of environmentally delicate habitats on Earth such as cold-water coral reefs or fishing grounds, as well as decommissioning sites. Thus, marine scientific and industrial offshore infrastructures may provide innovative test-bed services for robotics and sensor development.
Deep-sea Robotics and Icy Moons
Marine and space ocean research largely focus on satellite- and buoy-based monitoring. However, recent advances in robotic design, autonomy and sensor integration are creating solutions for the exploration of deep-sea pelagic and benthic environments that are transferable to the vast extraterrestrial oceans of the icy moons Enceladus and Europa. These water bodies are similar to terrestrial marine systems in terms of pressure, gravity and geothermal-dependent activity, internal tidal bulges and constant darkness, and also share the presence of hydrothermal vent activity (as revealed by Galileo, Cassini-Huygens and Hubble Space Telescope space missions). Fractures on icy surfaces are the product of large geysers emitted as cryovolcanism; in other words, high pressures and strong geothermal gradients produce large fluxes of hot water that are transported to the surface through cracks and crevasses in the ice cap. Due to decompression shocks, water suddenly evaporates and freezes once it emerges into space, falling back to the surface as snow.
The exploration of life on icy moons is regarded as a result of the propitious momentum introduced by space agencies, but a contribution will also be made by the latest developments in deep-sea robotics, which in turn may benefit from space research solutions. For example, sensor packages based on optoacoustics, passive acoustics and omics (eDNA) that are currently used for deep-sea ecosystems research may represent off-the-shelf solutions for the bioprospecting of exo-oceans’ putative life at ranges of the size of bacteria and beyond. Given the geological timeframe of exo-oceans’ existence and venting activity (which is comparable to that on Earth), a bold thought would be to consider that extraterrestrial organisms could even be present within the megafauna size ranges, and even with some level of morphological analogy (i.e. species of different phylogenetic origin are similar since they have responded to shared selective pressures). Extraterrestrial fauna may resemble sessile or motile morphological designs of our marine organisms within major marine phyla, such as Porifera (sponges), Arthropoda (e.g. crustaceans), Mollusca (e.g. octopus), Cnidaria (corals and jellyfishes), Anellida (worms) and even Chordata (e.g. fishes).
Exo-ocean exploration implies a technological challenge of much higher complexity than the exploration of any deep-sea location. Platform and sensor payloads are likely to constrain their use for exo-ocean exploration for the coming decades, and the penetration of large ice caps will require robotic carrier solutions (e.g. cryobots) bearing a tool to carve tunnels kilometres long. Here, the future development of deep-sea robotics is presented in relation to the engagement of space technologies in three major research areas: biomimetic structural and energetic design, AI, and miniaturization of life-tracing sensor technologies.
Biomimetic Structural and Energetic Design
The exploration of extreme environments such as terrestrial abyssal areas and exo-oceans requires innovative platforms that employ locomotion modalities beyond those of traditional assets (e.g. AUVs, crawlers and rovers). It also requires energy provision for longer mission autonomies and upgrades in cooperative behaviour (i.e. groups of units, to maximize the effectiveness of missions).
The development of biomimetic legged platforms that employ agile arthropod-like locomotion could dramatically enhance mobility on irregular terrains such as hydrothermal vent fields, and allow these platforms to anchor to the substrate and even sense using their limbs. The adaptation to dynamically changing, rough terrains and high pressure can also be achieved with new soft and lighter materials with a density close to seawater.
Another major challenge related to robotic autonomy is energy provision, which presently focuses on the development of efficient but often large batteries or hydrogen source equivalents such as hydrogen peroxide (H2O2) fuel cells. However, organisms rely on the creation of energy through biological processes, and this can be replicated by an artificial metabolism for a renewable in situ energy provision, such as via the processing of substrata (feeding-like functions), which may also be of potential benefit to space exploration. This could be based on a new generation of energetically autopoietic microbial fuel cells, but these represent a threat to space missions according to the contamination protocols of the Committee on Space Research (COSPAR). In the near future, the bacterial components may be removed and biochemical reaction routes inferred with reverse engineering approaches based on AI.
Platform AI in Mission Autonomy and Data Processing
The traditional command cycle for autonomous robotic marine platforms involves human operators sending fixed commands to the vehicle and the vehicle executing those commands and transmitting the acquired data to a ship or shore. However, this is increasingly unfeasible as such platforms work at increasing ocean depths, and is impossible in exo-ocean scenarios. AI and long-term autonomy are therefore required for key functionalities of long-term missions in operational contexts where data transmission is constrained (e.g. large oceanic depths, shielding ice sheets and astronomical bodies, and over immense distances). Such AI upgrades are required for navigation and trajectory planning, adaptive sampling and sensing, as well as the processing and summarization of very large amounts of heterogeneous data in real time. Hardware architectures capable of controlling sensors and executing algorithms in real time for content-based data interpretation independently from remote computational resources are the core of the edge computing paradigm.
For example, terrain relative navigation and simultaneous localization and mapping (SLAM) methods can be used to assist in navigation when acoustic ultra-short baseline (USBL) and single beacon signals are not available for localization. These have the benefit of being independent from any external infrastructure, but the limitation that local coordinates must ultimately be referenced back to a global frame. Deep-sea operational test beds will be critical in the development and refinement of robust navigation solutions for use in exo-oceans.
Furthermore, as marine robotic platforms acquire a huge amount of heterogeneous data, a relevant effort is being dedicated to autonomous data processing. AI applications must not only be capable of detecting and extracting useful information to reduce memory storage and to ease communication activities, but they also need to autonomously explain why such information is relevant and how it has been extracted from the data. Autonomous on-board interpretation of data and recommand of the vehicle, as in the case of adaptive sampling/sensing, have been developed in contexts where no a priori scientific knowledge of environmental features is available. In such cases, methods for the adaptive online exploration of target features of interest will be required to autonomously evidence new observations, based on a history of previous observations.
Life-tracing Sensor Packages
In astrobiology, the effort in the integration of sensor payload is currently centred on microorganisms, with conceived prototypes integrating molecular analyses with the micro-imaging and spectral analysis of liquid samples. A deep-sea-inspired technological development may contribute to shifting the focus of astrobiology research from microcellular to multicellular and larger-sized organisms.
While marine research is developing omics sensors to trace environmental DNA/RNA (eDNA/eRNA), the exo-ocean community is developing direct and indirect methods of detection of environmental nucleoside alternative structures, such as xeno-nucleic acids (eXNA). This is paving the way for the creation of in situ omics sensors that can scout for signatures of life in extreme environments (e.g. hydrothermal vents). This life-tracing capability in the deep sea will increasingly combine image and molecular sensor technologies into highly integrated payloads (Figure 2). Such a development will converge with in situ microfluidic sampling capability in the near future. Microfluidic sensors are true molecular laboratories. Presently, in situ microfluidic sampling capabilities are far from being achieved in the marine medium, but they are relevant for the identification of life within ice shells and exo-oceans on icy moons. Such sensors are assembled for the detection of molecules (e.g. amino acids), biopolymers (e.g. lipids as universal markers of life and carbohydrates as proxies for photosynthetic activity) or nucleic acids, using protocols integrated with magnetic particles and the single-channel structure nanopore for sequencing.
Conclusions: Toward a New Class of Blue Services
In the decade of the restoration of ocean ecosystems, environmental exploration and monitoring technologies are increasingly taking centre stage. By combining marine technologies with space robotics exploration solutions for the monitoring and surveillance of environmentally delicate habitats (e.g. cold-water coral reefs) or at oil and gas platform decommissioning sites, a new framework for dialogue emerges for robots and sensors within three major research topics of interest to produce a new class of blue services. For example, offshore industries could strongly benefit from robotic developments for the surveillance and maintenance of their infrastructures. At the same time, marine scientific and industrial offshore infrastructures may provide innovative test-bed services for robotics and sensor development.
以上是关于探索深海生态系统和冰卫星的协同作用-深海机器人开发与空间技术合作的主要内容,如果未能解决你的问题,请参考以下文章