一级倒立摆基于simulink的一级倒立摆控制器系统仿真
Posted fpga&matlab
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了一级倒立摆基于simulink的一级倒立摆控制器系统仿真相关的知识,希望对你有一定的参考价值。
1.软件版本
MATLAB2021a
2.本算法理论知识
%基于极点配置系统的降维观测器设计
% 极点配置法稳定系统
Qc=ctrb(A,B);
EA=[-10 0 0 0;...
0 -10 0 0;...
0 0 -2-2*sqrt(3)*i 0;...
0 0 0 -2+2*sqrt(3)*i];
PP=polyvalm(poly(EA),A);
Ks=[0 0 0 1]*inv(Qc)*PP;%状态反馈矩阵
%降维观测器设计
q=rank(C);
P=[C;0 1 0 0;0 0 0 1];
Q=inv(P);
Q1=Q(:,1:q);
Q2=Q(:,q+1:rank(Q));
A1=P*A*inv(P);
B1=P*B;
%A1矩阵分块
A11=A1(1:q,1:q);
A12=A1(1:q,q+1:4);
A21=A1(q+1:4,1:q);
A22=A1(q+1:4,q+1:4);
%B1矩阵分块
B11=B1(1:q,:);
B12=B1(q+1:4,:);
Pole=[-1 -2];%期望极点
K=place(A22',A12',Pole);%极点配置
L=K';%状态观测器增益矩阵

3.仿真分析
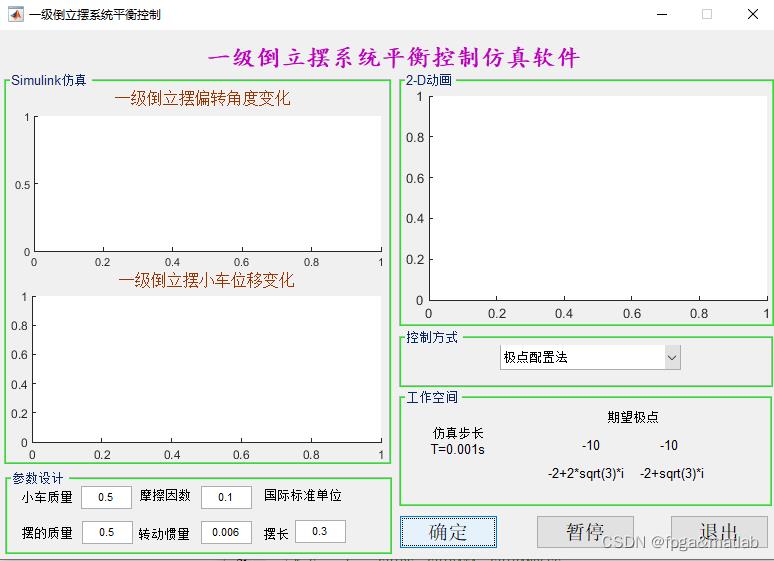
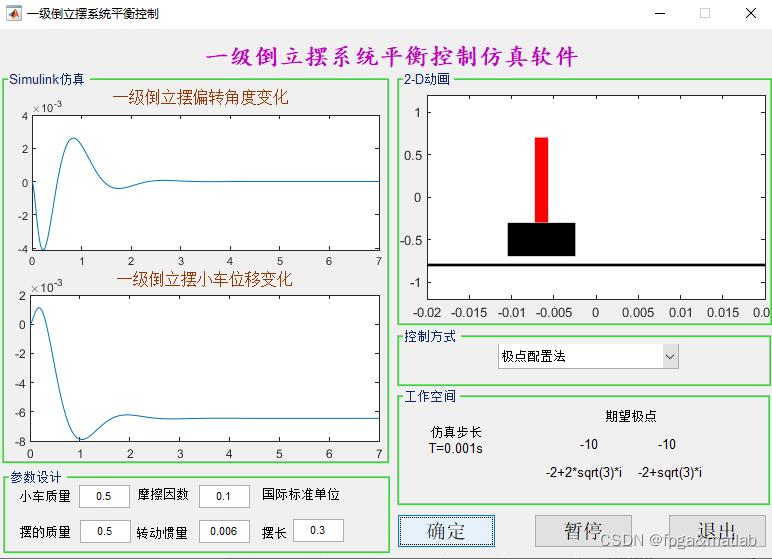
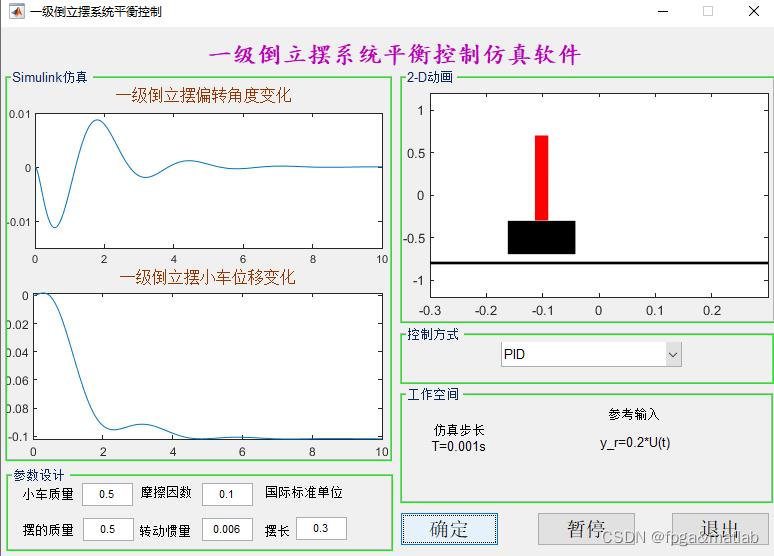
D237
以上是关于一级倒立摆基于simulink的一级倒立摆控制器系统仿真的主要内容,如果未能解决你的问题,请参考以下文章