OpenHarmony移植 3.1 版本系统到 STM32
Posted Top嵌入式
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了OpenHarmony移植 3.1 版本系统到 STM32相关的知识,希望对你有一定的参考价值。
文章目录
【OpenHarmony】STM32F407 移植 3.1版本系统
一、前言
最近 OpenHarmony 3.1 已正式发布,标准系统(LiteOS-A)基础能力增强,小型系统(LiteOS-M)基本没啥变化,趋于稳定,我之前写过一篇移植 LiteOS 移植到 STM32 的文章,当时的 LiteOS 版本还没有归入到 OpenHarmony,有些特性没有支持
为了弥补这个缺陷,移植最新的 LiteOS-M 到 MCU 上,使用最新的系统特性,我又研究了一下 OpenHarmony 移植到 MCU 的过程,之前移植失败有些细节没有注意到,后面研究后发现其实整体框架还是很清晰的, 顺便将OpenHarmony 移植到 MCU 的过程分享给大家,相关教程和代码放在我的 Gitee 和 Github 仓库
开发环境使用 VSCode + GCC +OpenOCD 开发,环境配置可以看前一篇文章:
博客链接:VSCode 搭建 STM32 开发环境
移植编译的方式使用的 Makefile 进行编译构建,没有使用官方推荐的 najia 进行构建,官方对于的 najia 的构建方式的描写的挺详细,也是主推的方法,有兴趣的可以自行去了解,我个人偏向于使用 Make 方式
二、开发环境
硬件平台:
软件环境:
VSCode、STM32CubeMX、Git工具
技术基础:
- 会使用 STM32CubeMX 配置生成 Makefile 工程
- 会使用 Git
- 懂一点 makefile 语法
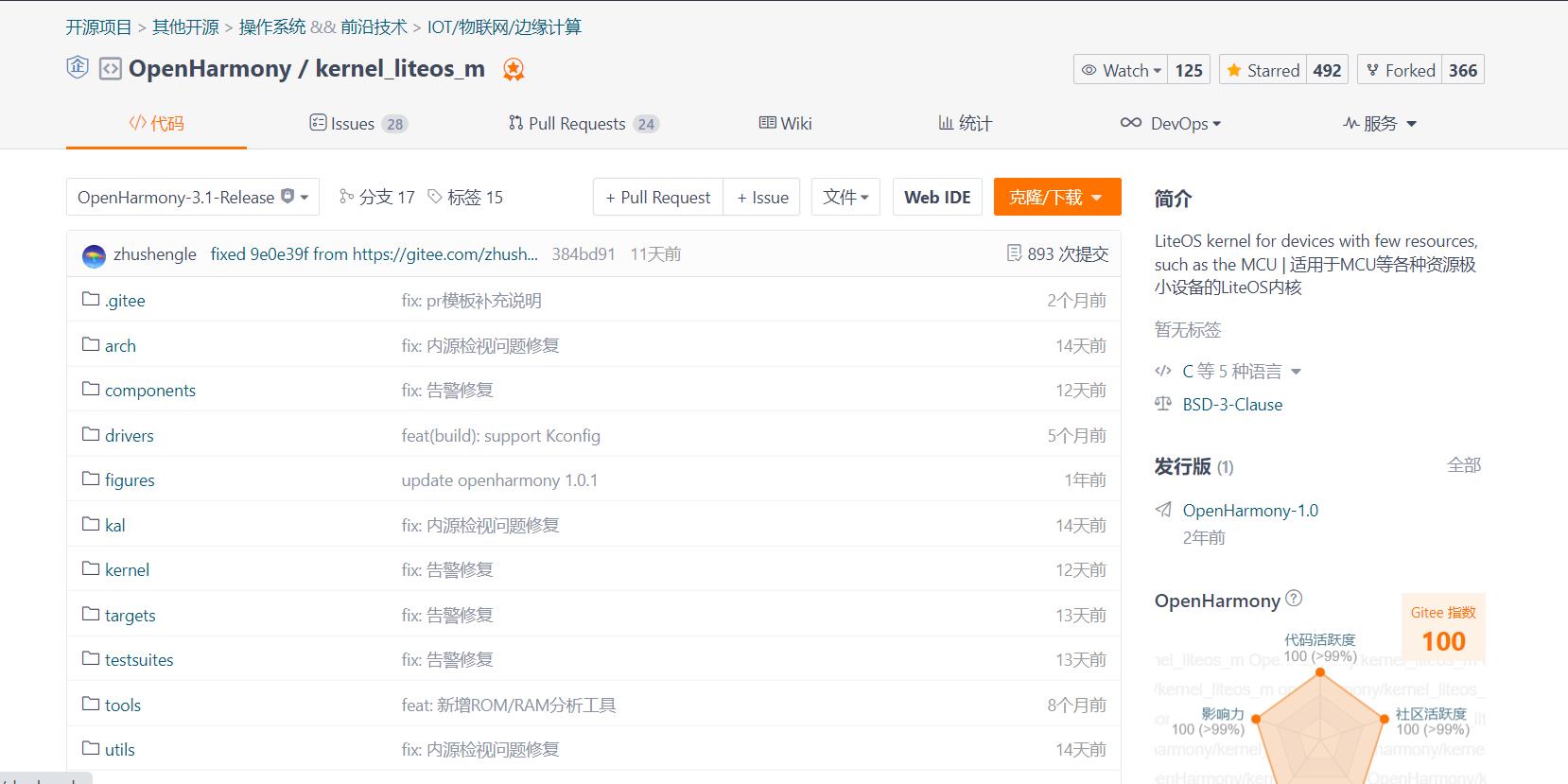
三、获取源码、添加第三方依赖
上 Gitee 拉取代码,选 3.1 发布的版本:链接
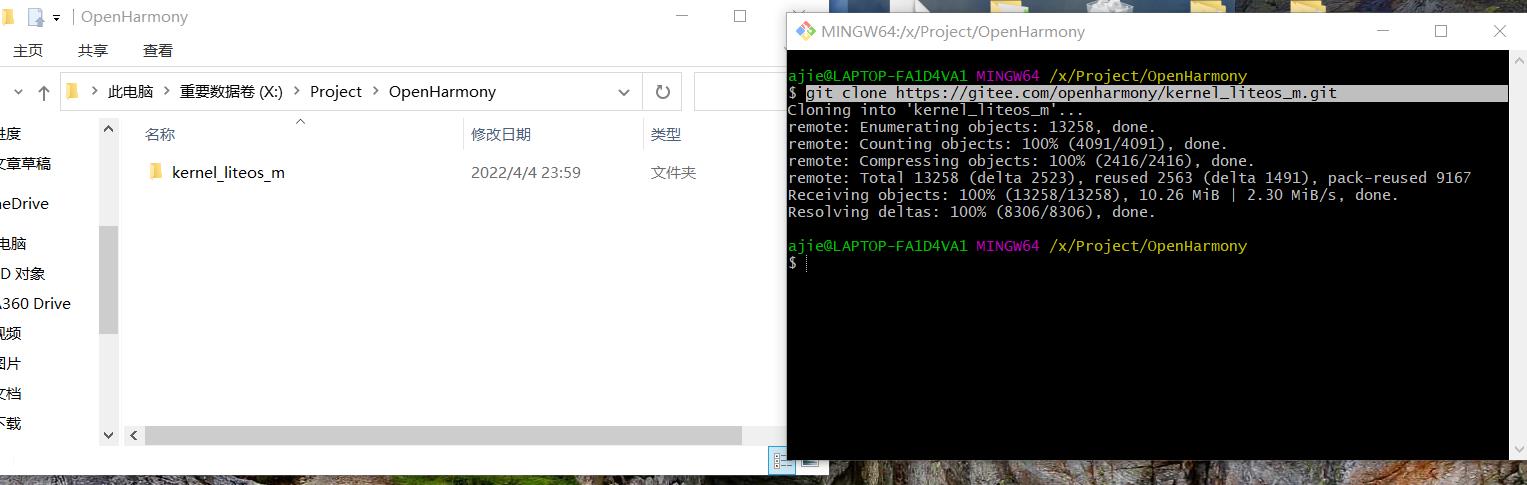
拉到本地的文件夹:
git clone https://gitee.com/openharmony/kernel_liteos_m.git
拉取:
然后在 git 进入到 kernel_liteos_m 里面,新建 third_party 目录并进入
cd kernel_liteos_m
mkdir ./third_party
cd third_party
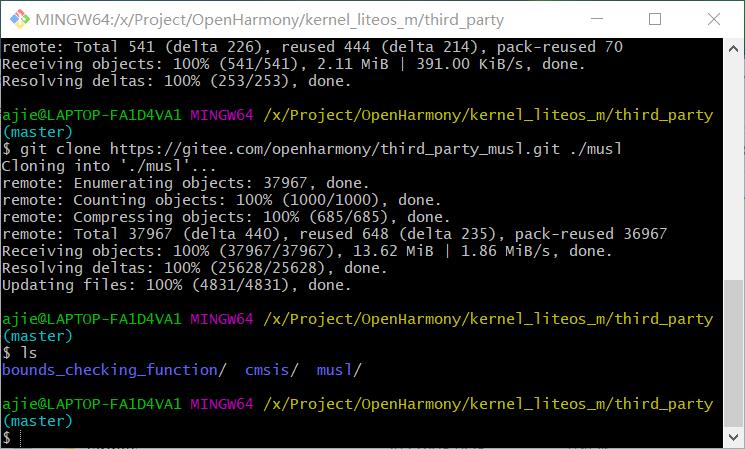
然后拉取第三方依赖文件到本地
git clone https://gitee.com/openharmony/third_party_bounds_checking_function.git ./bounds_checking_function
git clone https://gitee.com/openharmony/third_party_cmsis.git ./cmsis
git clone https://gitee.com/openharmony/third_party_musl.git ./musl
拉取完成如下:
四、导入STM32 Makefile 工程
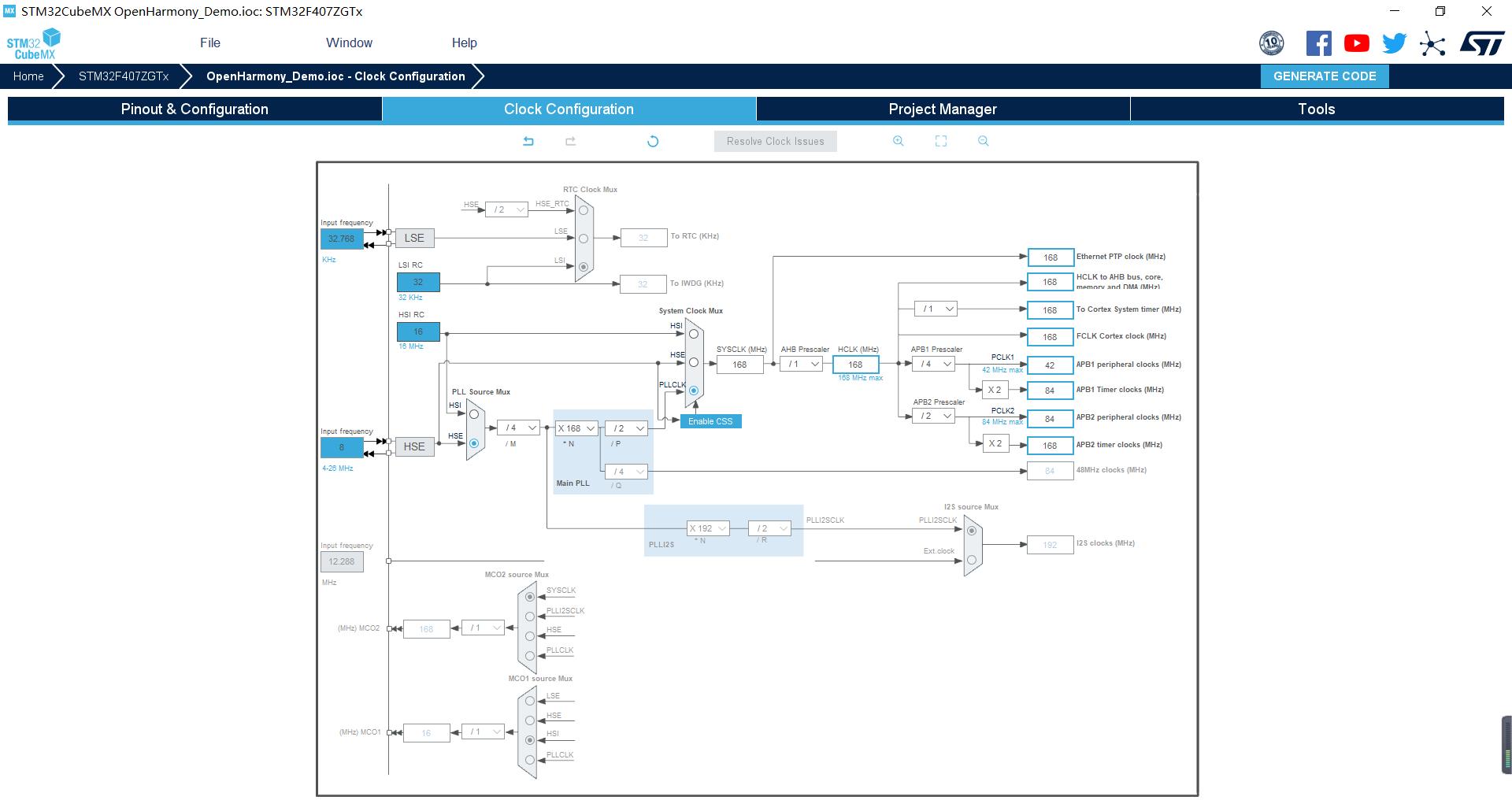
用 STM32CubeMX 新建一个 STM32F407ZGT6 的工程,导出到 liteos 目录下面的 targets 目录,STM32CubeMX 导出 Makefile 工程详细教程可以百度自行寻找,我简单的写一下,在 CubeMX 工程中我们配置好时钟树:
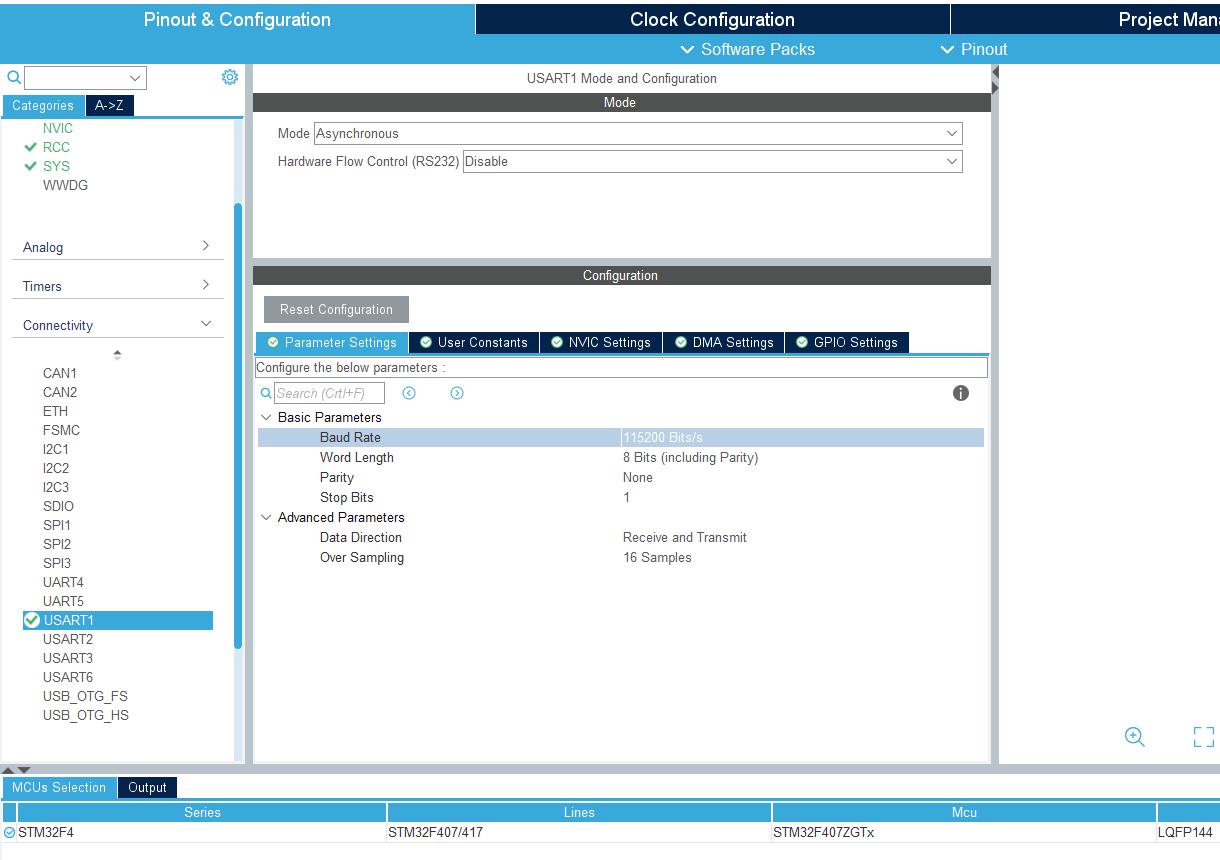
开启串口以及串口 DMA,方便进行调试:
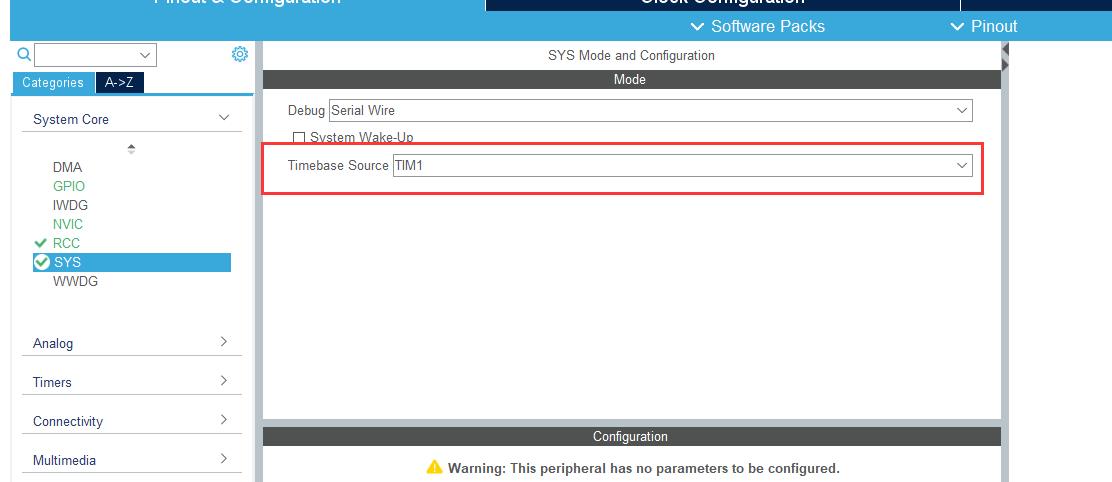
修改 HAL 库延时的基础时钟,改为其他非 SysTick 的定时器,避免 HAL 库延时的定时器和系统运行的定时器冲突:
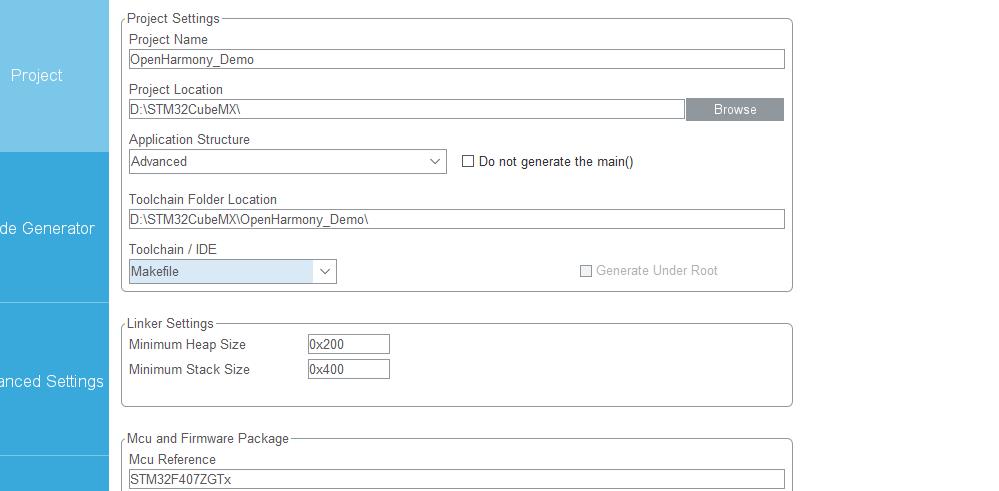
配置工程选项:
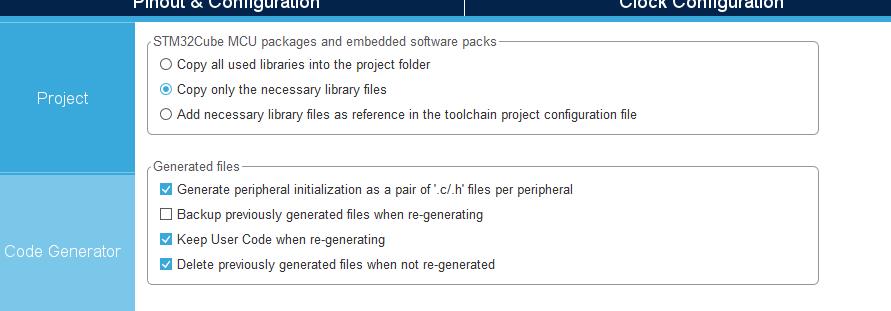
将生成的工程放到源码 targets 目录下:
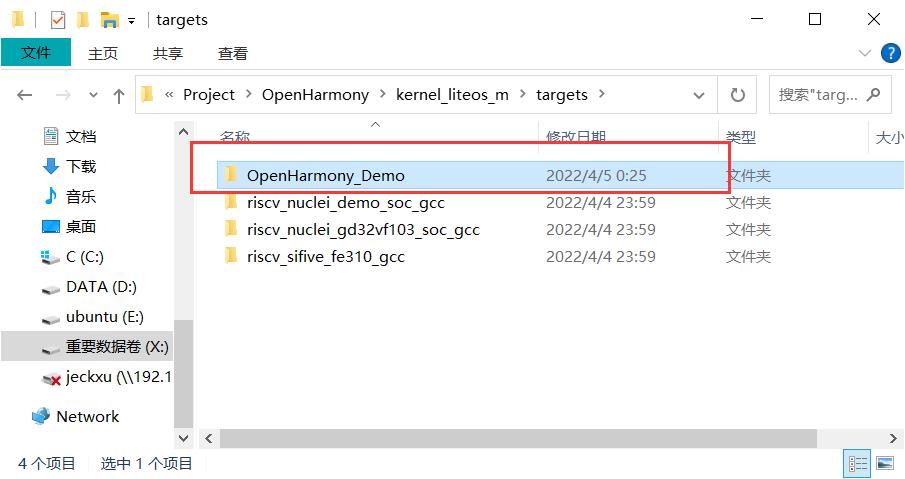
target 下提供了几个基于芯来risc-v和sifive risc-v架构的芯片示例,我们不用管他
五、配置编译文件
在 VSCode 打开源码目录:
在我们的 Target 下的工程目录中新建一个 My_Path.mk 文件,用于辅助进行编译构建,在该文件内依次添加如下的 Makefile 代码
定位顶层目录
# Topdir
LITEOSTOPDIR := ../../
LITEOSTOPDIR := $(realpath $(LITEOSTOPDIR))
内核通用的路径和文件:
# Common
C_SOURCES += $(wildcard $(LITEOSTOPDIR)/kernel/src/*.c) \\
$(wildcard $(LITEOSTOPDIR)/kernel/src/mm/*.c) \\
$(wildcard $(LITEOSTOPDIR)/components/cpup/*.c) \\
$(wildcard $(LITEOSTOPDIR)/components/power/*.c) \\
$(wildcard $(LITEOSTOPDIR)/components/backtrace/*.c) \\
$(wildcard $(LITEOSTOPDIR)/components/exchook/*.c) \\
$(wildcard $(LITEOSTOPDIR)/components/signal/*.c) \\
$(wildcard $(LITEOSTOPDIR)/utils/*.c)
C_INCLUDES += -I$(LITEOSTOPDIR)/utils \\
-I$(LITEOSTOPDIR)/kernel/include \\
-I$(LITEOSTOPDIR)/components/cpup \\
-I$(LITEOSTOPDIR)/components/power \\
-I$(LITEOSTOPDIR)/components/backtrace \\
-I$(LITEOSTOPDIR)/components/exchook \\
-I$(LITEOSTOPDIR)/components/signal
第三方库目录和文件:
# Third party related
C_SOURCES += $(wildcard $(LITEOSTOPDIR)/third_party/bounds_checking_function/src/*.c)\\
$(wildcard $(LITEOSTOPDIR)/kal/cmsis/*.c)\\
$(wildcard $(LITEOSTOPDIR)/kal/posix/src/*.c)
C_INCLUDES += -I$(LITEOSTOPDIR)/third_party/bounds_checking_function/include \\
-I$(LITEOSTOPDIR)/third_party/bounds_checking_function/src\\
-I$(LITEOSTOPDIR)/third_party/cmsis/CMSIS/RTOS2/Include \\
-I$(LITEOSTOPDIR)/third_party/musl/porting/liteos_m/kernel/include\\
-I$(LITEOSTOPDIR)/kal/cmsis \\
-I$(LITEOSTOPDIR)/kal/posix/include \\
-I$(LITEOSTOPDIR)/kal/posix/musl_src/internal
个人的文件和路径,位置预留:
# My file
C_SOURCES +=
C_INCLUDES +=
架构相关文件,选择 M4 相关架构文件的目录
# Arch related
ASM_SOURCES += $(wildcard $(LITEOSTOPDIR)/arch/arm/cortex-m4/gcc/*.s)
ASMS_SOURCES += $(wildcard $(LITEOSTOPDIR)/arch/arm/cortex-m4/gcc/*.S)
C_SOURCES += $(wildcard $(LITEOSTOPDIR)/arch/arm/cortex-m4/gcc/*.c)
C_INCLUDES += -I. \\
-I$(LITEOSTOPDIR)/arch/include \\
-I$(LITEOSTOPDIR)/arch/arm/cortex-m4/gcc
CFLAGS += -nostdinc -nostdlib
ASFLAGS += -imacros $(LITEOSTOPDIR)/kernel/include/los_config.h -DCLZ=CLZ
# list of ASM .S program objects
OBJECTS += $(addprefix $(BUILD_DIR)/,$(notdir $(ASMS_SOURCES:.S=.o)))
vpath %.S $(sort $(dir $(ASMS_SOURCES)))
$(BUILD_DIR)/%.o: %.S Makefile | $(BUILD_DIR)
$(CC) -c $(CFLAGS) $(ASFLAGS) $< -o $@
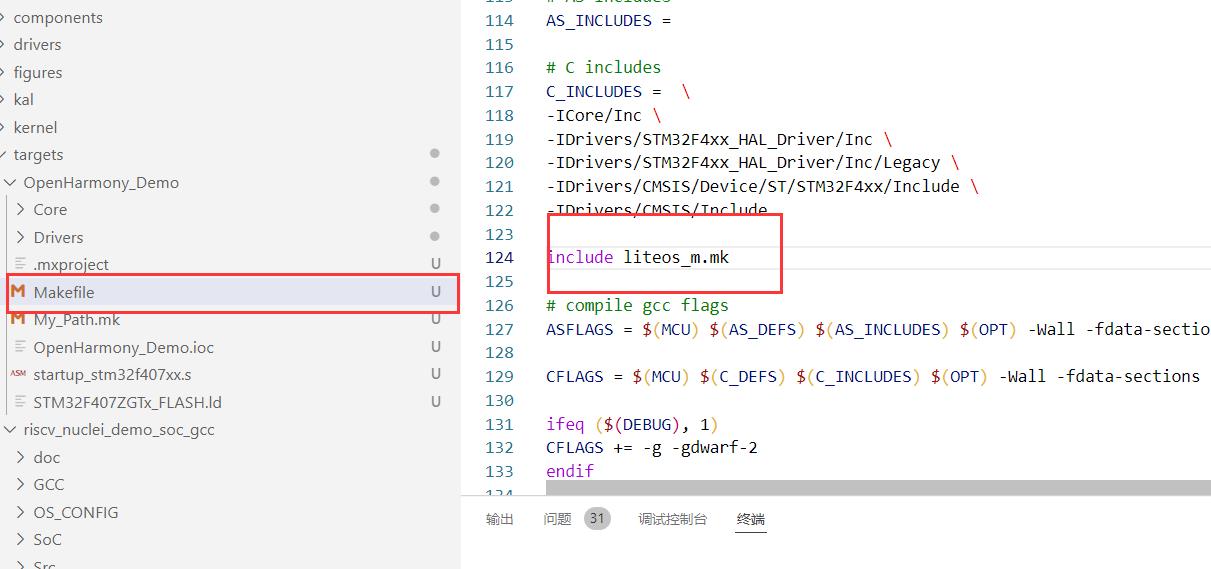
然后在工程的 Makefile 中如下位置调用我们的 makefile 文件:
六、添加工程配置文件
我们要添加一个工程配置文件,用于配置和裁剪内核,在 Targets 下的工程目录内,添加一个 target_config.h 文件,文件内容如下:
/**@defgroup los_config System configuration items
* @ingroup kernel
*/
#ifndef _TARGET_CONFIG_H
#define _TARGET_CONFIG_H
#include "stm32f4xx.h"
#include "stm32f4xx_it.h"
#ifdef __cplusplus
#if __cplusplus
extern "C"
#endif /* __cplusplus */
#endif /* __cplusplus */
/*=============================================================================
System clock module configuration
=============================================================================*/
#define OS_SYS_CLOCK SystemCoreClock
#define LOSCFG_BASE_CORE_TICK_PER_SECOND (1000UL)
#define LOSCFG_BASE_CORE_TICK_HW_TIME 0
#define LOSCFG_BASE_CORE_TICK_WTIMER 0
#define LOSCFG_BASE_CORE_TICK_RESPONSE_MAX SysTick_LOAD_RELOAD_Msk
/*=============================================================================
Hardware interrupt module configuration
=============================================================================*/
#define LOSCFG_PLATFORM_HWI 0
#define LOSCFG_USE_SYSTEM_DEFINED_INTERRUPT 0
#define LOSCFG_PLATFORM_HWI_LIMIT 128
/*=============================================================================
Openharmony Kernel configuration
=============================================================================*/
/*=============================================================================
Task module configuration
=============================================================================*/
#define LOSCFG_BASE_CORE_TSK_LIMIT 24
#define LOSCFG_BASE_CORE_TSK_IDLE_STACK_SIZE (0x500U)
#define LOSCFG_BASE_CORE_TSK_DEFAULT_STACK_SIZE (0x2D0U)
#define LOSCFG_BASE_CORE_TSK_MIN_STACK_SIZE (0x130U)
#define LOSCFG_BASE_CORE_TIMESLICE 1
#define LOSCFG_BASE_CORE_TIMESLICE_TIMEOUT 20000
/*=============================================================================
Semaphore module configuration
=============================================================================*/
#define LOSCFG_BASE_IPC_SEM 1
#define LOSCFG_BASE_IPC_SEM_LIMIT 48
/*=============================================================================
Mutex module configuration
=============================================================================*/
#define LOSCFG_BASE_IPC_MUX 1
#define LOSCFG_BASE_IPC_MUX_LIMIT 24
/*=============================================================================
Queue module configuration
=============================================================================*/
#define LOSCFG_BASE_IPC_QUEUE 1
#define LOSCFG_BASE_IPC_QUEUE_LIMIT 24
/*=============================================================================
Software timer module configuration
=============================================================================*/
#define LOSCFG_BASE_CORE_SWTMR 1
#define LOSCFG_BASE_CORE_SWTMR_ALIGN 1
#define LOSCFG_BASE_CORE_SWTMR_LIMIT 48
/*=============================================================================
Memory module configuration
=============================================================================*/
#define LOSCFG_MEM_MUL_POOL 1
#define OS_SYS_MEM_NUM 20
/*=============================================================================
Exception module configuration
=============================================================================*/
#define LOSCFG_PLATFORM_EXC 1
/*=============================================================================
TestSuite configuration
=============================================================================*/
#define LOSCFG_TEST 0
#ifndef LOSCFG_BACKTRACE_TYPE
#define LOSCFG_BACKTRACE_TYPE 1
#endif
/**
* @ingroup los_config
* Configuration backtrace depth.
*/
#ifndef LOSCFG_BACKTRACE_DEPTH
#define LOSCFG_BACKTRACE_DEPTH 15
#endif
#ifdef __cplusplus
#if __cplusplus
#endif /* __cplusplus */
#endif /* __cplusplus */
#endif /* _TARGET_CONFIG_H */
这些配置文件的含义和功能,主要是对着 los_config.h 来进行修改的,后面我会进行分析!
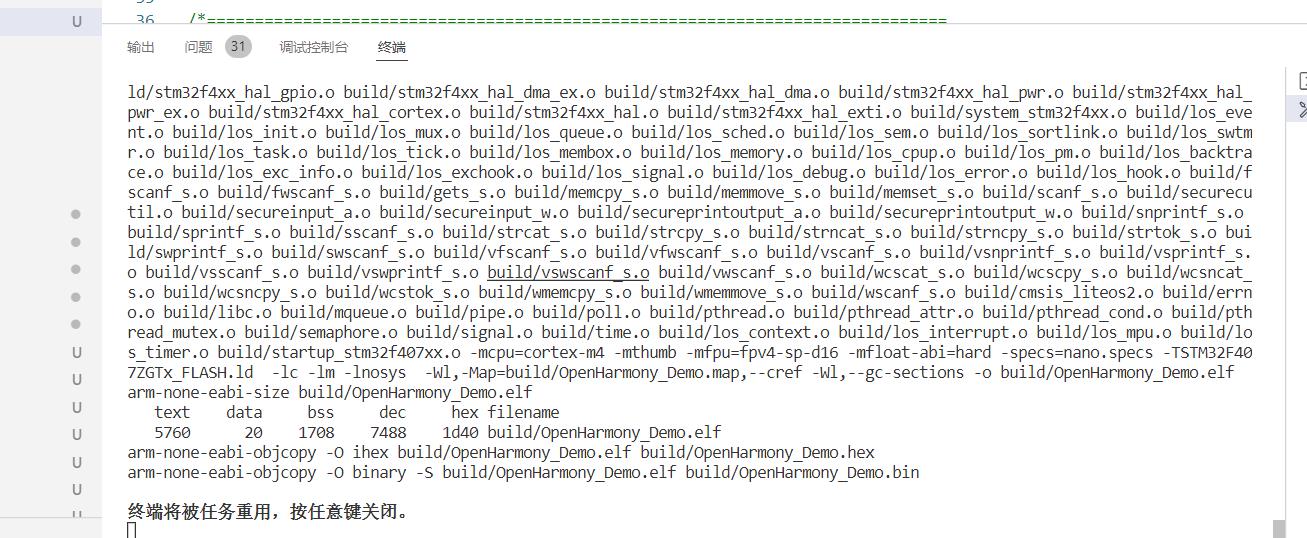
配置文件完成后对代码进行编译,编译使用的 task.json 来快速配置的,配置环境那一节我有提到过,修改路径如下:
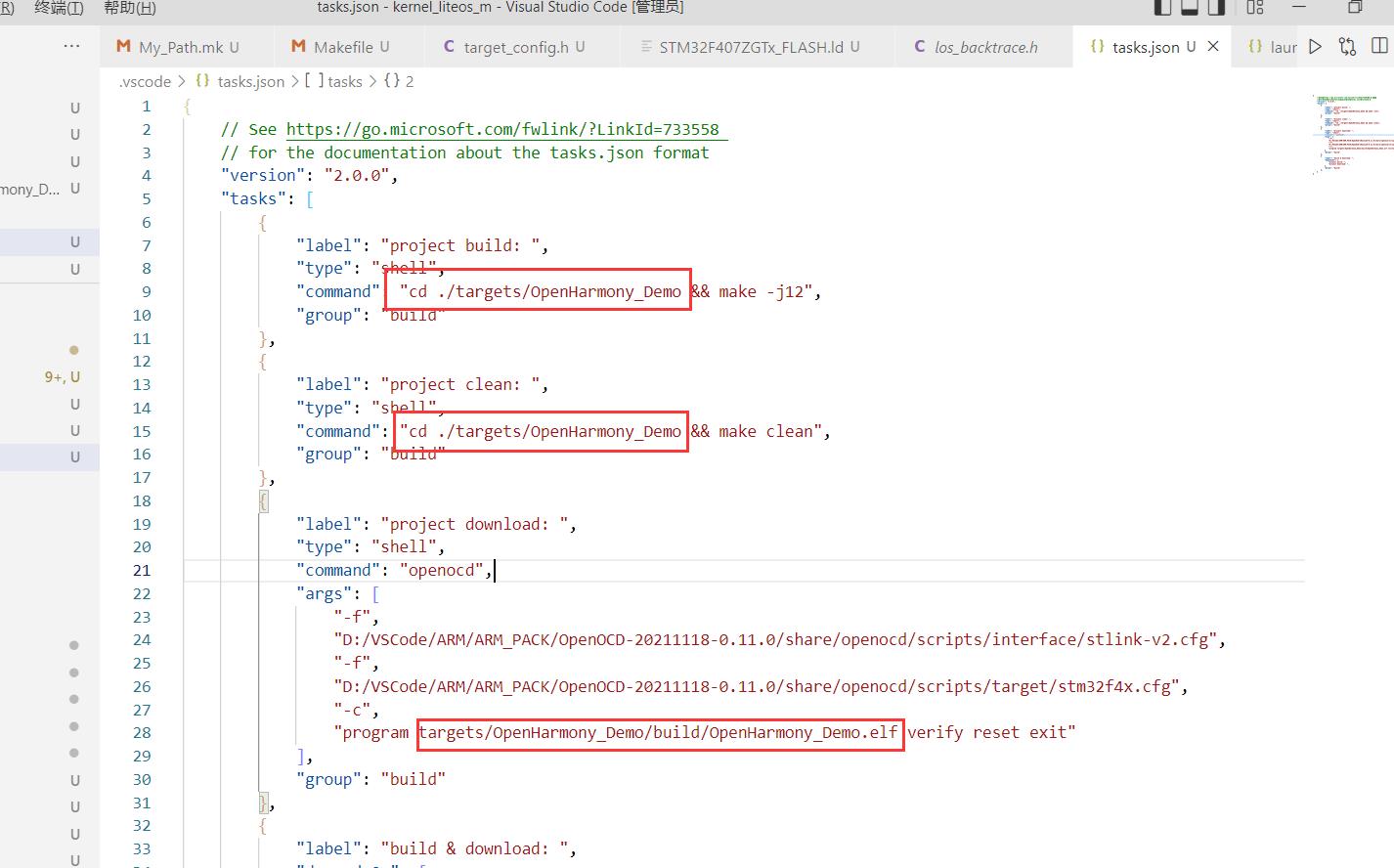
然后编译,编译完成如下:
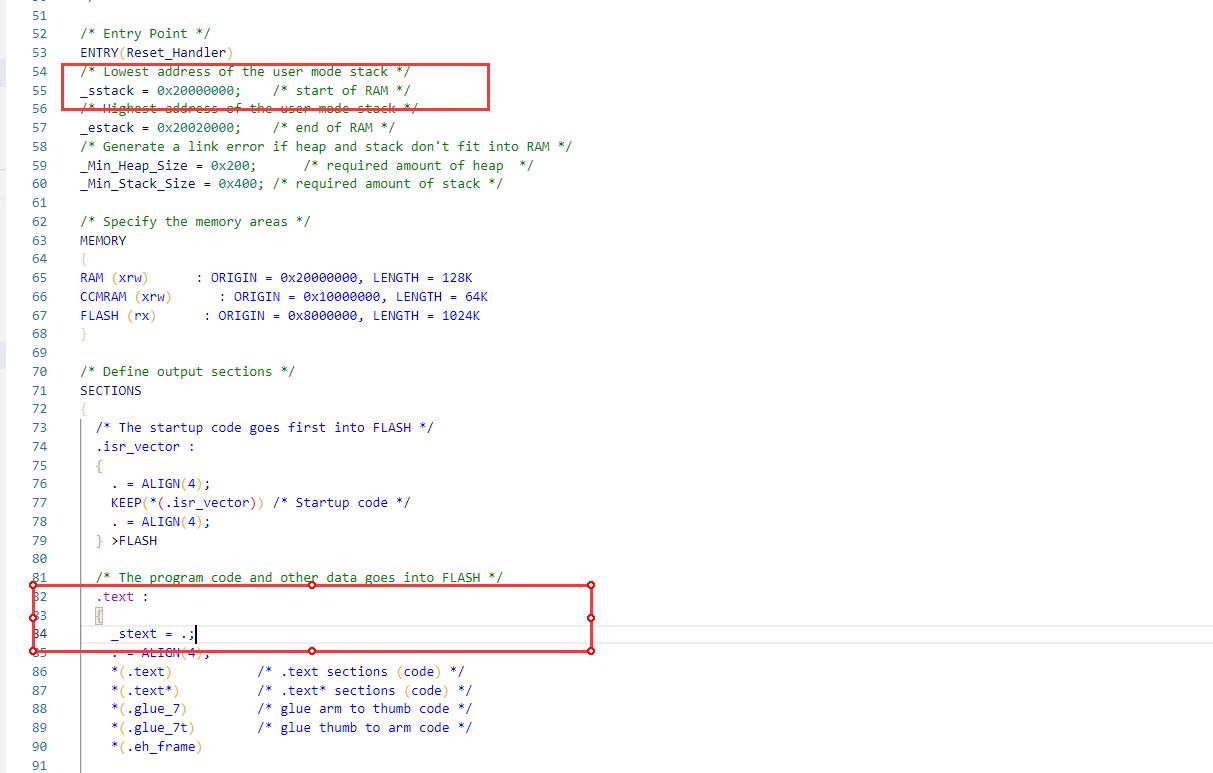
七、修改链接脚本
在链接脚本 targets\\OpenHarmony_Demo\\STM32F407ZGTx_FLASH.ld 中定义栈的起始地址为 0x20000000:
/* Lowest address of the user mode stack */
_sstack = 0x20000000; /* start of RAM */
添加 .text 段的起始地址,这是链接脚本的语法,将当前位置地址赋值给 _stext:
_stext = .;
具体位置如下:
八、修改中断服务函数
虽然编译完成了,但就算下载了程序,也无法正常运行,因为之前的配置代码写的
/*=============================================================================
Hardware interrupt module configuration
=============================================================================*/
#define LOSCFG_PLATFORM_HWI 0
#define LOSCFG_USE_SYSTEM_DEFINED_INTERRUPT 0
#define LOSCFG_PLATFORM_HWI_LIMIT 128
不使用硬件中断接管,所以我们需要在系统运行的两个重要中断服务函数添加内核的接口,让STM32的中断管理可以跳转到内核的处理函数:
进入 targets\\OpenHarmony_Demo\\Core\\Src\\stm32f4xx_it.c 文件,在下面两个函数添加如下函数:
在 PendSV 异常中进入 LiteOS HalPendSV 异常处理函数,进行任务切换操作
void PendSV_Handler(void)
/* USER CODE BEGIN PendSV_IRQn 0 */
HalPendSV();
/* USER CODE END PendSV_IRQn 0 */
/* USER CODE BEGIN PendSV_IRQn 1 */
/* USER CODE END PendSV_IRQn 1 */
在 SysTick 中断服务函数添加 OsTickHandler 函数,为系统提供时间基准
void SysTick_Handler(void)
/* USER CODE BEGIN SysTick_IRQn 0 */
OsTickHandler();
/* USER CODE END SysTick_IRQn 0 */
/* USER CODE BEGIN SysTick_IRQn 1 */
/* USER CODE END SysTick_IRQn 1 */
添加个头文件包含:
#include "los_arch_context.h"
#include "los_tick.h"
九、修改串口映射
之前我们有开启串口,所以我们再把 printf 的底层映射到串口上,供内核调用,便于调试,在 main.c 中包含头文件 include "stdio.h",然后添加底层接口,底层接口未启动时使用阻塞方式发生数据,系统启动后则使用 DMA 传输,通过信号量防止 DMA 使用冲突:
#if 1
int _write(int fd, char *ptr, int len)
osStatus_t result;
osKernelState_t state;
if (osKernelGetState() == osKernelInactive)
//系统未启动时不使用DMA
HAL_UART_Transmit(&huart1, ptr, len, 0xFFFF);
return len;
else
//获取信号,如果上一个DMA传输完成
//信号就能获取到,没有传输完成任务就挂起
//等到传输完成再恢复
result = osSemaphoreAcquire(UART1_TX_DMA_SemaphoreHandle, 0xFFFF);
if (result == osOK)
HAL_UART_Transmit_DMA(&huart1, ptr, len); //获取成功,发送数据
return len;
else
return -1; //获取失败
#endif
// DMA 传输完成后会调用传输完成回调函数,在该函数中我们释放信号
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart)
if (huart->Instance == huart1.Instance)
osSemaphoreRelease(UART1_TX_DMA_SemaphoreHandle);
十、添加测试任务
然后在main函数中添加一个测试任务和一个信号量:
变量定义:
osSemaphoreId_t UART1_TX_DMA_SemaphoreHandle;
const osSemaphoreAttr_t UART1_TX_DMA_Semaphore_attributes =
.name = "UART1_TX_DMA_Semaphore",
;
osThreadId_t uart_taskHandle;
const osThreadAttr_t uart_task_attributes =
.name = "uart_task",
.stack_size = 512 * 2,
.priority = (osPriority_t)osPriorityNormal3,
;
初始化:
osKernelInitialize();
UART1_TX_DMA_SemaphoreHandle = osSemaphoreNew(1, 1, &UART1_TX_DMA_Semaphore_attributes);
uart_taskHandle = osThreadNew(Uart_Task, NULL, &uart_task_attributes);
osKernelStart();
任务实体:
void Uart_Task(void *argument);
void Uart_Task(void *argument)
while (1)
printf("System Runing!!!\\r\\n");
osDelay(1000);
编译代码:
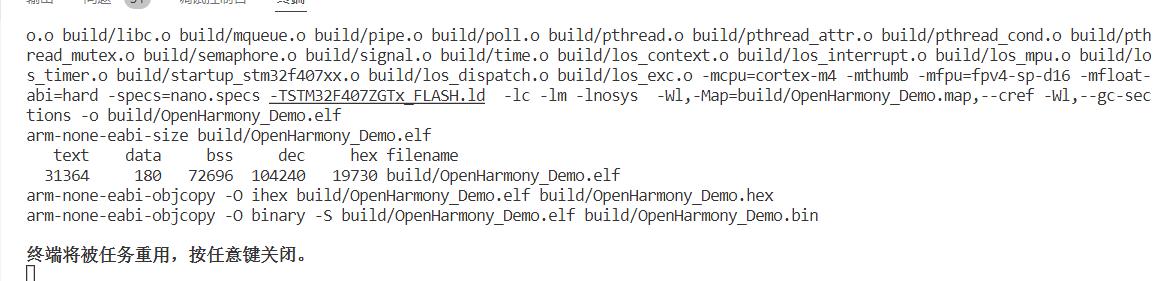
十一、实验现象
串口打印系统正常运行信息
十二、工程源码
示例工程的核心代码放到 Gitee 上了,需要自取
Gitee:https://gitee.com/JeckXu666/openharmony-for-mcu
 创作打卡挑战赛
创作打卡挑战赛
 赢取流量/现金/CSDN周边激励大奖
赢取流量/现金/CSDN周边激励大奖
以上是关于OpenHarmony移植 3.1 版本系统到 STM32的主要内容,如果未能解决你的问题,请参考以下文章