波斯顿动力机器人为啥那么牛逼?
Posted strongerHuang
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了波斯顿动力机器人为啥那么牛逼?相关的知识,希望对你有一定的参考价值。
关注+星标公众号,不错过精彩内容
作者 | strongerHuang
微信公众号 | 嵌入式专栏
原文:1980 - 2022年,波斯顿动力发展历程、机器人产品分类汇总。
视频:位于我的视频号『strongerHuang』中视频专辑《斯顿动力机器人》(第15集)。
因为之前做过巡检类机器人、物流类机器人、AGV小车等产品,自认为做出的机器人还是比较“牛逼”了。
但是,当我全面去了解了波斯顿动力(Boston Dynamics)的发展以及全线机器人产品之后,才发现自己做的机器人太小儿科了,不如别人的一点皮毛。
正好,最近在我的视频号『strongerHuang』分享波士顿动力机器人相关的系列视频,索性抽时间整理了1980 - 2022年,波斯顿动力发展历程以及机器人产品分类。
波斯顿动力公司
Boston Dynamics,即波士顿动力公司,由 Marc Raibert(马克·雷伯特)于 1992 年创立,总部位于美国马萨诸塞州沃尔瑟姆,是一家美国工程和机器人设计公司。
Marc Raibert(马克·雷伯特)
早期,波士顿动力公司是从麻省理工学院分拆出来的,曾与海军空战中心训练系统师( NAWCTSD) ,以及防高级研究计划局( DARPA ) 合作研究机器人。
1992年,波士顿动力公司成立。
2013年,波士顿动力被Google X(Alphabet子公司)收购。
2017年,波士顿动力被日本软银收购。
2019年,波士顿动力收购了一个硅谷初创公司Kinema Systems(3D视觉初创公司)。
自 2020 年 12 月起归现代汽车集团所有,但直到 2021 年 6 月才完成收购。
机器人产品分类及发展
你可能会觉得波斯顿动力机器人那些“炫酷”的视频,都是假的,或者都是特效做出来(当然,有部分up主的视频有特效处理)。
当你真正了解波斯顿动力机器人的发展,你才会觉得波斯顿动力的机器人是真的牛逼。
波斯顿动力公司的产品有很多款,以及一些产品的衍生产品,相信大家看过相关视频都有所大概了解。
下面罗列一些主要产品(有十几款):
1.早期单足、两足和四足机器人(1980~1995年)
早期(1980~1995),波士顿动力公司的创始人(马克·雷伯特)联合卡内基梅隆大学、麻省理工学院开发了一些单足、两足和四足机器人。

2.RISE 攀爬机器人(2006年)
2006年,波士顿动力公司联合宾夕法尼亚大学、斯坦福大学、伯克利分校、卡内基梅隆大学,在 DARPA 的资助下,开发了一款特殊腿脚的攀爬机器人。

3.RHex 蟑螂机器人(2007年)
2007年,波士顿动力针对崎岖地形设计了一款“六足”机器人,它可以上、下爬行、 跳跃、 左右移动等,动作类似于蟑螂。
在2012年,波士顿动力对这款产品进行了加固、增强电池、改进移动性等升级。

(2012年升级版“蟑螂”机器人)
4.BigDog 大狗机器人(2004~2010年)
2004~2010年,波士顿动力开发的体型庞大、利用“汽油机”提供动力的机器人,期间迭代了几个版本。

5.LittleDog 小狗机器人(2009~2010年)
2009年,波士顿动力公司为DARPA开发的一种小型四足机器人 LittleDog (小狗机器人),在 2010 年左右发布。
与波士顿动力公司运营的 BigDog(大狗) 不同,LittleDog 旨在作为其他机构的测试平台。

6. Petman 佩特曼(2009~2013年)
2009年,研发的 Petman 佩特曼是一款人形双足机器人,由 BigDog (大狗)改进而来。

与 BigDog 一样,Petman 针对不同应用场景也是有几个版本。
7.AlphaDog 阿尔法狗(LS3)(2011~2012年)
2011年,AlphaDog 由 BigDog(大狗)改进而来,能在炎热、寒冷、潮湿和肮脏的环境中运行。
AlphaDog 原型机
AlphaDog 阿尔法狗的成品也叫 LS3(Legged Squad Support System,步兵班支援系统),主要用于军事化作业。

8.Sand Flea 跳蚤机器人(2012年)
Sand Flea 跳蚤是一款小巧的,可以跳跃的机器人。

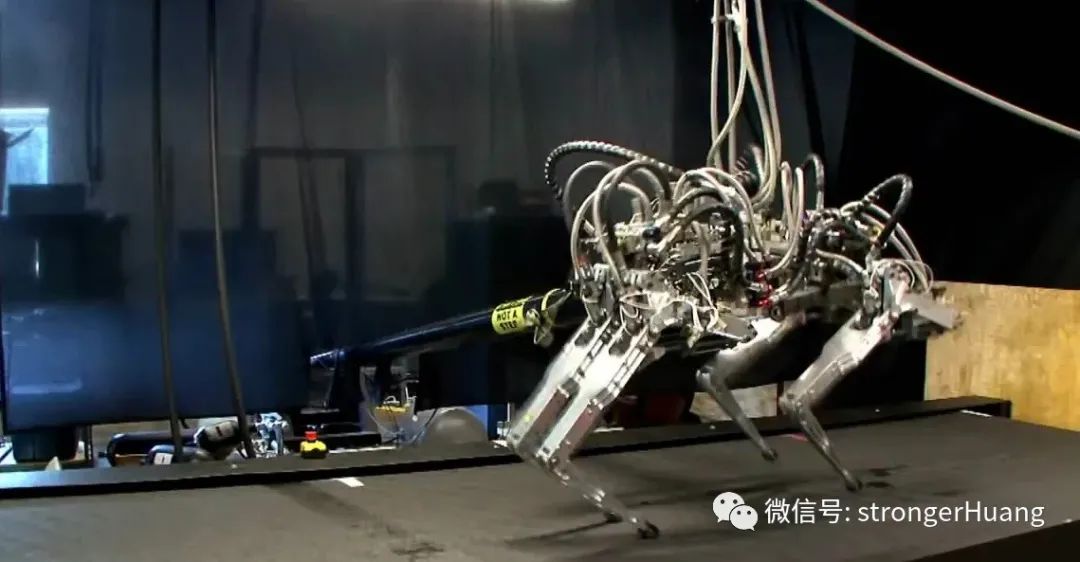
9.Cheetah 猎豹(2012年)
Cheetah 猎豹速度达到了 18 英里/小时(约29km/h),2013年打破记录达到了 28.3 英里/小时(约45.5km/h)
10.WildCat 野猫(2013年)
WildCat 野猫的速度奔跑可以达到 19 英里/小时(约30km/h)。

11.早期 Atlas 阿特拉斯(2013年)
2013年,波士顿动力根据早期的 Petman(佩特曼)人形机器改造设计而成 Atlas(阿特拉斯),也是今天,大家看到的“酷炫机器人”的前身。

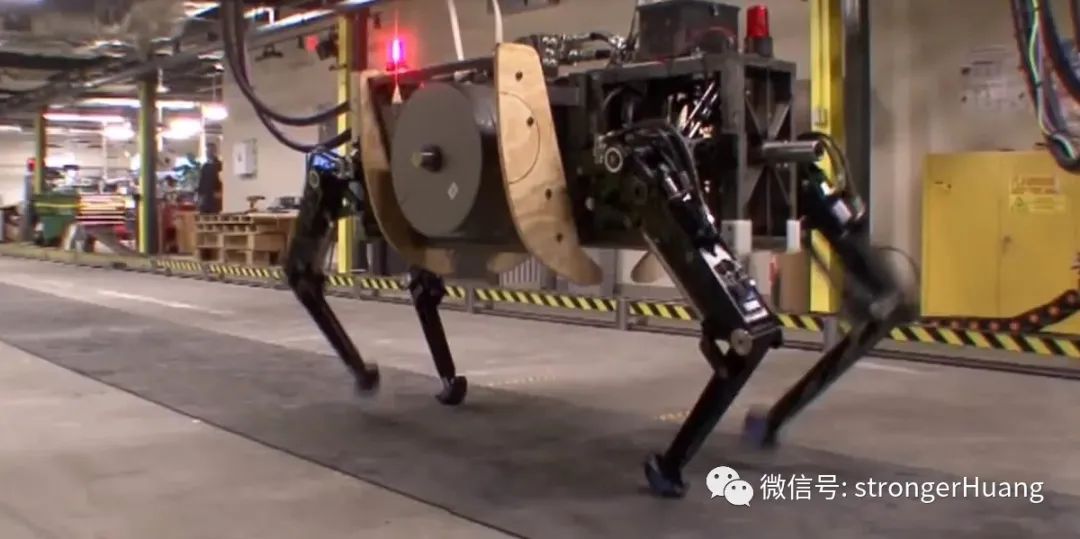
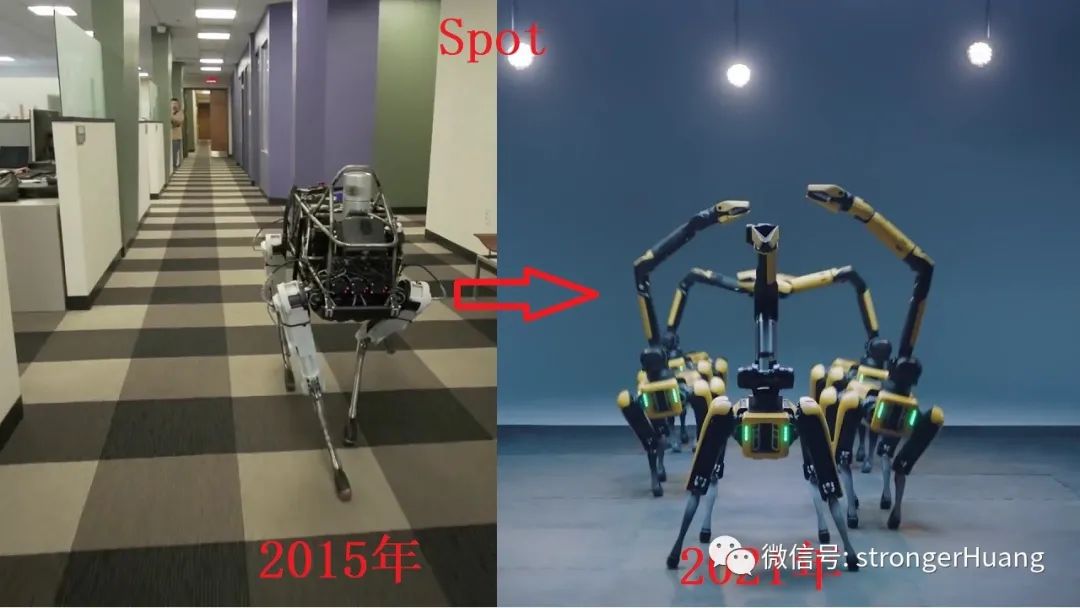
12.早期 Spot(2015年)
2015年 波士顿动力专为室内和室外操作而设计的一款四足机器人 Spot,也是今天,大家看到的“集群跳舞机器人”的前身。
13.Handle(2016年 ~ 2021年)
2016年,Handle 是一种研究型机器人,有两条灵活的腿在轮子上,速度能达到 9 英里/小时 (约14 km/h) 。

14.新版 Atlas 阿特拉斯(2016 ~ 2021年)
2016 ~ 2021年,大家看到的 Atlas 外形都差不多,主要是功能有很大升级,大家看到的“酷炫”的动作,就是这几年升级的。

15.新版 Spot(2017 ~ 2021年)
2017年 ~ 2021年,与 Atlas 一样,Spot这几年外形都差不多,主要是升级各种应用场景的功能。

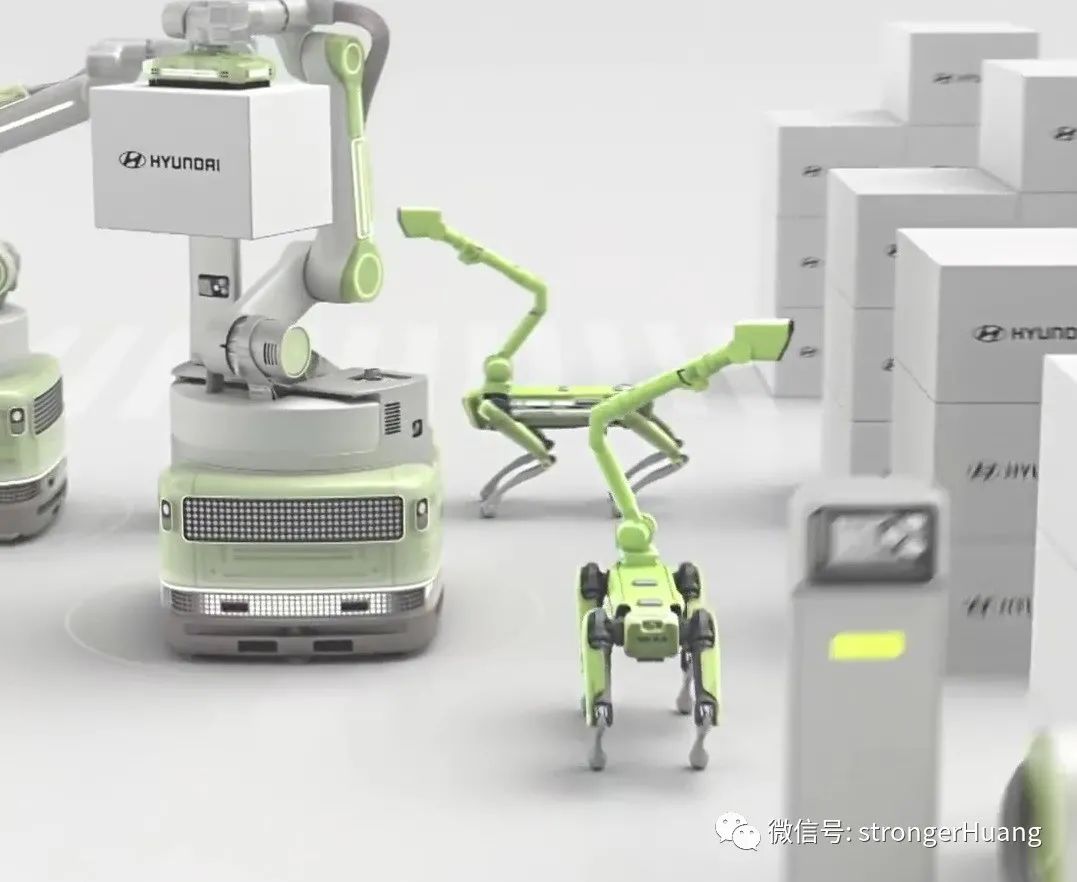
16.现代机器人(2021 ~ 2022年)
2021年,波斯顿动力被现代收购之后,机器人就变得更加“现代化”了。
最后
有不少“网络人”看到别人很牛逼,就看不惯,就喜欢喷别人。在你没有真正去了解别人之前,请不要以自己的视角去评判别人。
看完以上波斯顿动力全线家人产品以及它的发展经历,你还会觉得那些“酷炫”的动作都是假的吗?
为了让大家进一步了解波斯顿动力,我在我的视频号『strongerHuang』分享了波士顿动力机器人的一些视频:

包括本文描述的 1980~2022 波斯顿机器人全线产品汇总(位于第15集):
点击“阅读原文”查看更多分享。
以上是关于波斯顿动力机器人为啥那么牛逼?的主要内容,如果未能解决你的问题,请参考以下文章