GA避障基于遗传优化算法的小车障碍物避障仿真
Posted fpga&matlab
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了GA避障基于遗传优化算法的小车障碍物避障仿真相关的知识,希望对你有一定的参考价值。
clear
%clf
% format long
%设定数据
Data=[];
Data.B=[20 18]; %X轴Y轴边界
Data.S_E=[0,0;20,20]; %起点,终点
Data.size=100; %种群大小
Data.length=30; %染色体长度
M=round(Data.size/2); %外部存档集规模
MaxIte=20; %最大迭代次数
pm=0.3;%变异概率
pc=0.6;%交叉概率
% Obs.S=[];%障碍物各个顶点
Data.Obs(1).S=[1,4;2,4;2,1;1,1];%每个顶点存储按照顺时针顺序排列
Data.Obs(2).S=[3,6;4,6;4,3;3,3];
Data.Obs(3).S=[6,4;7,4;7,1;6,1];
Data.Obs(4).S=[8,10;9,10;9,5;8,5];
Data.Obs(5).S=[10,14;14,14;14,12;10,12];
Data.Obs(6).S=[14,8;18,8;18,6;14,6];
[Pop R k]=intpop(Data,Data.size,Data.length); %生成初始种群
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
chromlength=Data.length;%染色体长度
Obs=Data.Obs; %障碍物坐标 与 Data.Obs相同
S_E=Data.S_E; %起点,终点 与Data.S_E 相同
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
Lindex=[]; %每个种群中每个线段的直线参数a b c ax+by+c=0
Lindex.abc=[];
for i=1:Data.size
[Cindex P_Lindex]=check_crossing(Pop.ch(i).x(:,1),Pop.ch(i).x(:,2),chromlength,Obs,S_E); %检查是否路径段是否与障碍物相交
%Cindex表示出现交叉点的点位置下标
while 1-isempty(Cindex)
[Pop.ch(i).x]=newpop(Pop.ch(i).x,Data,R,chromlength,k,Cindex); %生成新种群 %保证点不在障碍物内
[Cindex P_Lindex]=check_crossing(Pop.ch(i).x(:,1),Pop.ch(i).x(:,2),chromlength,Obs,S_E);%对新种群检查是否相交
% Cindex
if 1-isempty(Cindex)
[Pop.ch(i).x]=newpop(Pop.ch(i).x,Data,R,chromlength,k,Cindex);
[Cindex P_Lindex]=check_crossing(Pop.ch(i).x(:,1),Pop.ch(i).x(:,2),chromlength,Obs,S_E);
end
end
Lindex(i).abc=P_Lindex;
end
[F]=Goals(Pop,S_E,Data.size,chromlength,Obs,Lindex); %计算目标函数值
Pop.f=F;
Qop.ch=[];%外部存档集
Qop.f=[];
Qop.fitness=[];
%开始循环
for t=1:MaxIte
t
[Pop Qop Pop_Qop]=cal_Fitness(Pop,Qop);%计算适应度
[Qop]=environmental_sele(Pop,Qop,Pop_Qop,M); %环境选择
if t==MaxIte
[NDSet]=sel_NDSet(Qop); %选择非支配个体
break;
else
[NewQ_ch]=binary_tournament_selection(Qop); % 锦标赛选择
[NewQ_ch]=cross_mutation(NewQ_ch,Data,Obs,S_E,pc,pm,chromlength,k,R);% 染色体交叉 突变
[NewQ_ch]=delete_point(NewQ_ch,Data,chromlength,Obs,S_E,k,R); %平滑算子(有待改进)
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%重新赋值
Q_size=length(NewQ_ch);
Qop.ch=[];
for q=1:Q_size
Qop.ch(q).x=NewQ_ch(q).ch; %重新赋值染色体
end
Qop.f=Goals(Qop,S_E,Q_size,chromlength,Obs,Lindex); %重新计算目标函数值
Qop.fitness=[];
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%以下为画图程序
S_size=6; %总共多少个点
S(1).xy=[1,4;2,4;2,1;1,1;1,4];
S(2).xy=[3,6;4,6;4,3;3,3;3,6];
S(3).xy=[6,4;7,4;7,1;6,1;6,4];
S(4).xy=[8,10;9,10;9,5;8,5;8,10];
S(5).xy=[10,14;14,14;14,12;10,12;10,14];
S(6).xy=[14,8;18,8;18,6;14,6;14,8];
ND_size=length(NDSet.ch);
% ND_size=Data.size;
for example=1:ND_size; %第几个种群
P=[Data.S_E(1,:);NDSet.ch(example).x];
P=[P;Data.S_E(2,:)];
figure(example);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
for i=1:S_size
for j=1:4
plot([S(i).xy(j,1) S(i).xy(j+1,1)],[S(i).xy(j,2) S(i).xy(j+1,2)],'-r');
hold on;
end
end
grid on;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
plot(P(:,1),P(:,2),'.b');
hold on
plot(P(:,1),P(:,2),'-b');
hold on
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
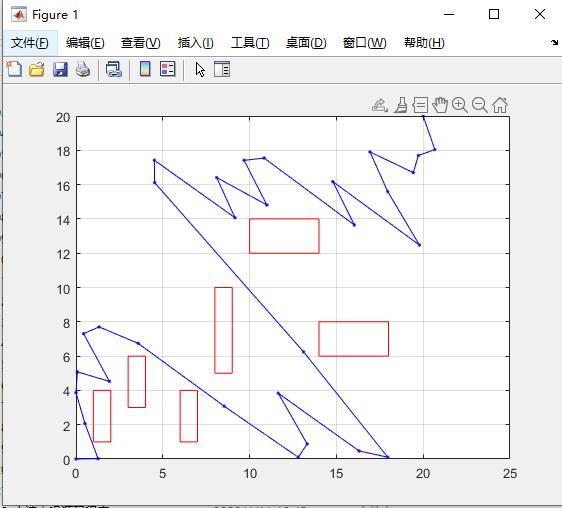
迭代初始状态
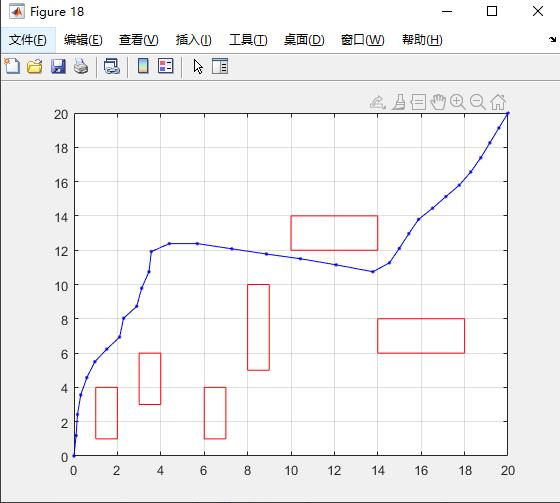
迭代完成之后
D235
以上是关于GA避障基于遗传优化算法的小车障碍物避障仿真的主要内容,如果未能解决你的问题,请参考以下文章