Opencv学习笔记--图像处理平滑,锐化操作
Posted yqtaowhu
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Opencv学习笔记--图像处理平滑,锐化操作相关的知识,希望对你有一定的参考价值。
图像平滑算法
图像平滑与图像模糊是同一概念,主要用于图像的去噪。平滑要使用滤波器,为不改变图像的相位信息,一般使用线性滤波器。
几种不同的平滑方法:
1. 归一化滤波器
Blurs an image using the normalized box filter.
void blur(InputArray src, OutputArray dst, Size ksize, Point anchor=Point(-1,-1), int borderType=BORDER_DEFAULT )
其中ksize为核窗口大小,
Point(-1, -1):
Indicates where the anchor point (the pixel evaluated) is located with respect to the neighborhood.If there is a negative value, then the center of the kernel is considered the anchor point.
2. 高斯滤波
void GaussianBlur(InputArray src, OutputArray dst, Size ksize, double sigmaX, double sigmaY=0, int borderType=BORDER_DEFAULT )
sigmaX: The standard deviation in x. Writing 0 implies that x is calculated using kernel size.
sigmaxY: The standard deviation in y. Writing 0 implies that y is calculated using kernel size.
3. 中值滤波
void medianBlur(InputArray src, OutputArray dst, int ksize)
Size of the kernel (only one because we use a square window). Must be odd.因为其核窗口为正方形,所以他只有一个。
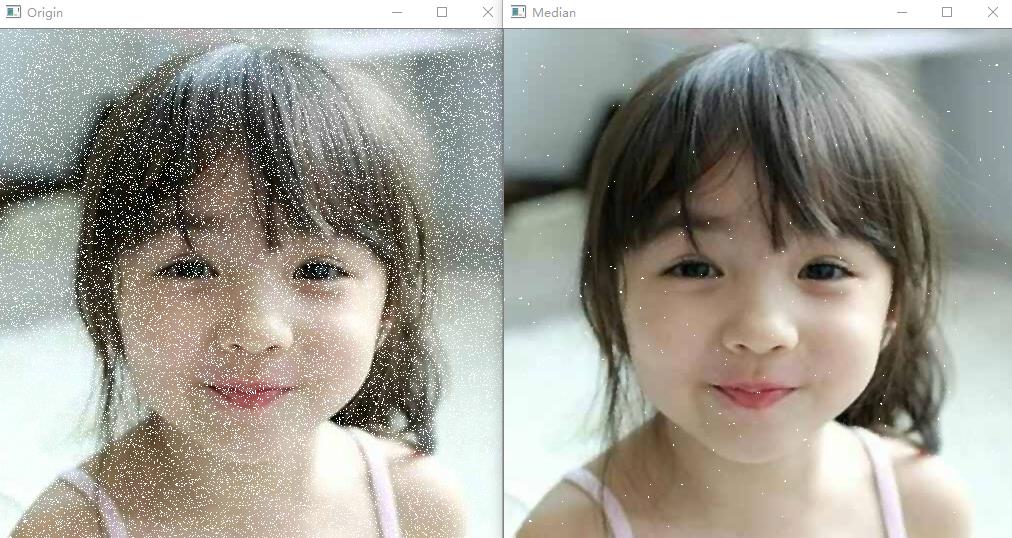
中值滤波对椒盐噪声的去噪效果最好。
Opencv加椒盐噪声
椒盐噪声是由图像传感器,传输信道,解码处理等产生的黑白相间的亮暗点噪声。椒盐噪声往往由图像切割引起。
我们用程序来模拟椒盐噪声,随机选取一些像素,把这些像素设为白色。
void salt(Mat& image, int n)
for (int k = 0; k<n; k++)
int i = rand() % image.cols;
int j = rand() % image.rows;
if (image.channels() == 1) //判断是一个通道
image.at<uchar>(j, i) = 255;
else
image.at<cv::Vec3b>(j, i)[0] = 255;
image.at<cv::Vec3b>(j, i)[1] = 255;
image.at<cv::Vec3b>(j, i)[2] = 255;
//测试程序
#include "opencv2/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include <iostream>
#include <string>
using namespace std;
using namespace cv;
void salt(Mat &image, int n ); //椒盐噪声产生函数
int main(void)
Mat src; Mat dst;
/// Load the source image
src = imread("cute.jpg", IMREAD_COLOR);
salt(src, 30000);
dst = src.clone();
medianBlur(src, dst, 3);
string window_origin = "Origin";
string window_median = "Median";
imshow(window_origin, src);
imshow(window_median, dst);
waitKey(0);
return 0;
可以看到中值滤波对椒盐噪声简直是好的逆天了,这里加入了30000个噪声点。
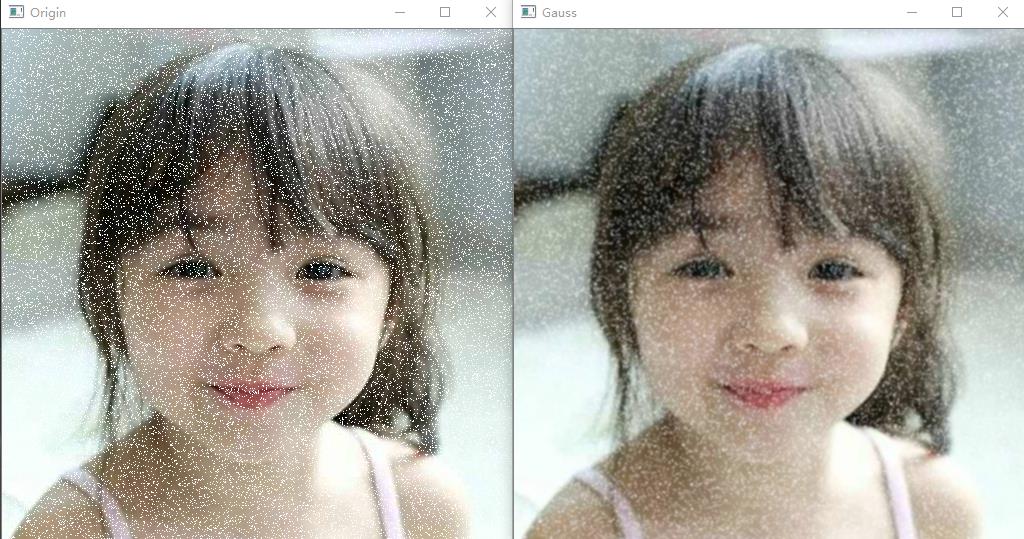
这里放一个高斯滤波的效果图,可以看到在对椒盐噪声的处理上,高斯是比不过中值滤波的。
锐化操作
锐化滤波器是为了突出显示图像的边界和其他的细节,这些锐化是基于一阶导数和二阶导数的。
一阶导数可以产生粗的图像边缘,并广泛的应用于边缘提取,二阶导数对于精细的细节相应更好,常被用于图像增强。
常用的算子为Sobel和Laplacian
Sobel算子
关于sobel算子可参考相关书籍或者:
http://blog.csdn.net/caoenze/article/details/46699923?locationNum=2
导数求出的是变化最大的一部分,即突变:
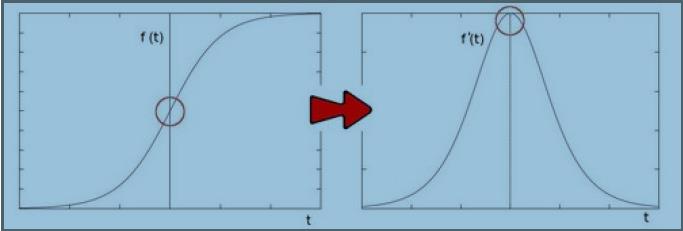
可以看到在圆圈的区域的导数最大。
下面给出具体求解步骤:
步骤:
1.首先进行对图像高斯平滑消除噪声
GaussianBlur( src, src, Size(3,3), 0, 0, BORDER_DEFAULT );
2.将彩色的图像转换成灰度图像
cvtColor( src, src_gray, CV_RGB2GRAY );
3.分别计算x方向和y方向的导数,ddepth为图像的深度,应该避免溢出的情况,因此设置CV_16S
Sobel( src_gray, grad_x, ddepth, 1, 0, 3, scale, delta, BORDER_DEFAULT );
Sobel( src_gray, grad_y, ddepth, 0, 1, 3, scale, delta, BORDER_DEFAULT );
4.将其转成CV_8U
convertScaleAbs( grad_x, abs_grad_x );
convertScaleAbs( grad_y, abs_grad_y );
5.用两个方向的倒数去模拟梯度
addWeighted( abs_grad_x, 0.5, abs_grad_y, 0.5, 0, grad );
应用实例:
#include "opencv2/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
using namespace cv;
/**
* @function main
*/
int main(int, char** argv)
//![variables]
Mat src, src_gray;
Mat grad;
int scale = 1;
int delta = 0;
int ddepth = CV_16S;
//![variables]
//![load]
src = imread("cute.jpg", IMREAD_COLOR); // Load an image
if (src.empty())
return -1;
//![load]
//![reduce_noise]
GaussianBlur(src, src, Size(3, 3), 0, 0, BORDER_DEFAULT);
//![reduce_noise]
//![convert_to_gray]
cvtColor(src, src_gray, COLOR_BGR2GRAY);
//![convert_to_gray]
//![sobel]
/// Generate grad_x and grad_y
Mat grad_x, grad_y;
Mat abs_grad_x, abs_grad_y;
/// Gradient X
//Scharr( src_gray, grad_x, ddepth, 1, 0, scale, delta, BORDER_DEFAULT );
Sobel(src_gray, grad_x, ddepth, 1, 0, 3, scale, delta, BORDER_DEFAULT);
/// Gradient Y
//Scharr( src_gray, grad_y, ddepth, 0, 1, scale, delta, BORDER_DEFAULT );
Sobel(src_gray, grad_y, ddepth, 0, 1, 3, scale, delta, BORDER_DEFAULT);
//![sobel]
//![convert]
convertScaleAbs(grad_x, abs_grad_x);
convertScaleAbs(grad_y, abs_grad_y);
//![convert]
//![blend]
/// Total Gradient (approximate)
addWeighted(abs_grad_x, 0.5, abs_grad_y, 0.5, 0, grad);
//![blend]
//![display]
const char* window_name = "Sobel Demo - Simple Edge Detector";
const char* window="Origin";
imshow(window,src);
imshow(window_name, grad);
waitKey(0);
//![display]
return 0;
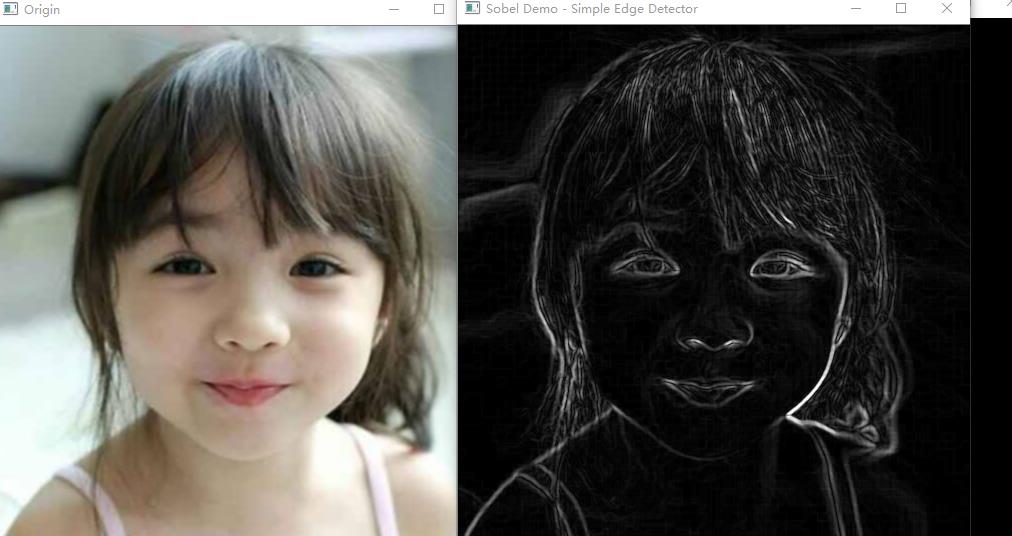
结果如图所示:
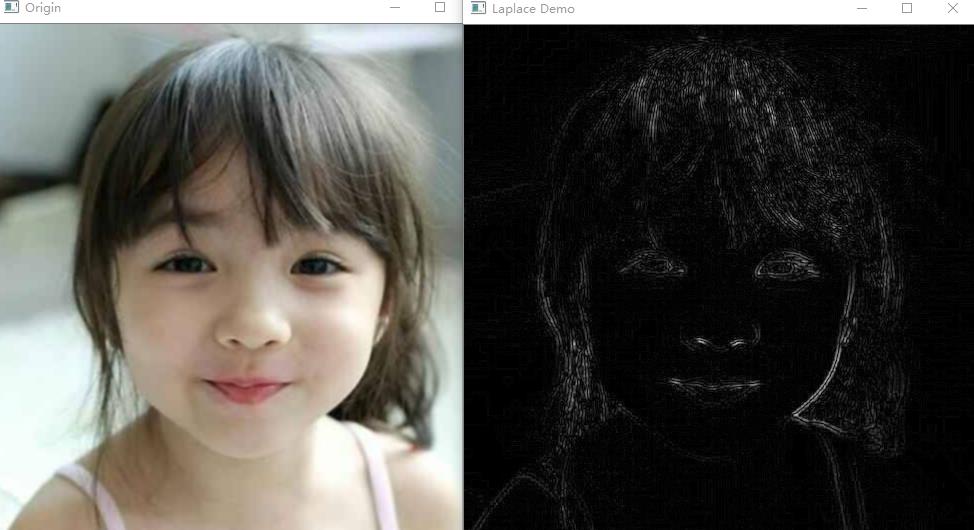
Laplacian算子
代码实现:
#include "opencv2/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
using namespace cv;
/**
* @function main
*/
int main(int, char** argv)
//![variables]
Mat src, src_gray, dst;
int kernel_size = 3;
int scale = 1;
int delta = 0;
int ddepth = CV_16S;
//![variables]
//![load]
src = imread("cute.jpg", IMREAD_COLOR); // Load an image
if (src.empty())
return -1;
//![load]
//![reduce_noise]
/// Reduce noise by blurring with a Gaussian filter
GaussianBlur(src, src, Size(3, 3), 0, 0, BORDER_DEFAULT);
//![reduce_noise]
//![convert_to_gray]
cvtColor(src, src_gray, COLOR_BGR2GRAY); // Convert the image to grayscale
//![convert_to_gray]
/// Apply Laplace function
Mat abs_dst;
//![laplacian]
Laplacian(src_gray, dst, ddepth, kernel_size, scale, delta, BORDER_DEFAULT);
//![laplacian]
//![convert]
convertScaleAbs(dst, abs_dst);
//![convert]
//![display]
const char* window_name = "Laplace Demo";
const char* window = "Origin";
imshow(window, src);
imshow(window_name, abs_dst);
waitKey();
//![display]
return 0;
以上是关于Opencv学习笔记--图像处理平滑,锐化操作的主要内容,如果未能解决你的问题,请参考以下文章