PSO神经网络PID基于matlab的PSO优化的神经网络PID训练和测试仿真
Posted fpga&matlab
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了PSO神经网络PID基于matlab的PSO优化的神经网络PID训练和测试仿真相关的知识,希望对你有一定的参考价值。
目录
1.软件版本
MATLAB2021a
2.核心代码
web browser http://www.ilovematlab.cn/thread-62563-1-1.html
%% 清空环境变量
clc
clear
%% 网络结构初始化
rate1=0.006;rate2=0.001;rate3=0.000001; %学习率
k=0.3;K=3;
y_1=zeros(3,1);y_2=y_1;y_3=y_2; %输出值
u_1=zeros(3,1);u_2=u_1;u_3=u_2; %控制率
h1i=zeros(3,1);h1i_1=h1i; %第一个控制量
h2i=zeros(3,1);h2i_1=h2i; %第二个控制量
h3i=zeros(3,1);h3i_1=h3i; %第三个空置量
x1i=zeros(3,1);x2i=x1i;x3i=x2i;x1i_1=x1i;x2i_1=x2i;x3i_1=x3i; %隐含层输出
%权值初始化
k0=0.03;
%第一层权值
w11=k0*rand(3,2);w11_1=w11;w11_2=w11_1;
w12=k0*rand(3,2);w12_1=w12;w12_2=w12_1;
w13=k0*rand(3,2);w13_1=w13;w13_2=w13_1;
%第二层权值
w21=k0*rand(1,9);w21_1=w21;w21_2=w21_1;
w22=k0*rand(1,9);w22_1=w22;w22_2=w22_1;
w23=k0*rand(1,9);w23_1=w23;w23_2=w23_1;
%值限定
ynmax=1;ynmin=-1; %系统输出值限定
xpmax=1;xpmin=-1; %P节点输出限定
qimax=1;qimin=-1; %I节点输出限定
qdmax=1;qdmin=-1; %D节点输出限定
uhmax=1;uhmin=-1; %输出结果限定
%% 网络迭代优化
for k=1:1:200
%% 控制量输出计算
%--------------------------------网络前向计算--------------------------
%系统输出
y1(k)=(0.4*y_1(1)+u_1(1)/(1+u_1(1)^2)+0.2*u_1(1)^3+0.5*u_1(2))+0.3*y_1(2);
y2(k)=(0.2*y_1(2)+u_1(2)/(1+u_1(2)^2)+0.4*u_1(2)^3+0.2*u_1(1))+0.3*y_1(3);
y3(k)=(0.3*y_1(3)+u_1(3)/(1+u_1(3)^2)+0.4*u_1(3)^3+0.4*u_1(2))+0.3*y_1(1);
r1(k)=0.7;r2(k)=0.4;r3(k)=0.6; %控制目标
%系统输出限制
yn=[y1(k),y2(k),y3(k)];
yn(find(yn>ynmax))=ynmax;
yn(find(yn<ynmin))=ynmin;
%输入层输出
x1o=[r1(k);yn(1)];x2o=[r2(k);yn(2)];x3o=[r3(k);yn(3)];
%隐含层
x1i=w11*x1o;
x2i=w12*x2o;
x3i=w13*x3o;
%比例神经元P计算
xp=[x1i(1),x2i(1),x3i(1)];
xp(find(xp>xpmax))=xpmax;
xp(find(xp<xpmin))=xpmin;
qp=xp;
h1i(1)=qp(1);h2i(1)=qp(2);h3i(1)=qp(3);
%积分神经元I计算
xi=[x1i(2),x2i(2),x3i(2)];
qi=[0,0,0];qi_1=[h1i(2),h2i(2),h3i(2)];
qi=qi_1+xi;
qi(find(qi>qimax))=qimax;
qi(find(qi<qimin))=qimin;
h1i(2)=qi(1);h2i(2)=qi(2);h3i(2)=qi(3);
%微分神经元D计算
xd=[x1i(3),x2i(3),x3i(3)];
qd=[0 0 0];
xd_1=[x1i_1(3),x2i_1(3),x3i_1(3)];
qd=xd-xd_1;
qd(find(qd>qdmax))=qdmax;
qd(find(qd<qdmin))=qdmin;
h1i(3)=qd(1);h2i(3)=qd(2);h3i(3)=qd(3);
%输出层计算
wo=[w21;w22;w23];
qo=[h1i',h2i',h3i'];qo=qo';
uh=wo*qo;
uh(find(uh>uhmax))=uhmax;
uh(find(uh<uhmin))=uhmin;
u1(k)=uh(1);u2(k)=uh(2);u3(k)=uh(3); %控制律
%% 网络权值修正
%--------------------------------------网络反馈修正----------------------
%计算误差
error=[r1(k)-y1(k);r2(k)-y2(k);r3(k)-y3(k)];
error1(k)=error(1);error2(k)=error(2);error3(k)=error(3);
J(k)=0.5*(error(1)^2+error(2)^2+error(3)^2); %调整大小
ypc=[y1(k)-y_1(1);y2(k)-y_1(2);y3(k)-y_1(3)];
uhc=[u_1(1)-u_2(1);u_1(2)-u_2(2);u_1(3)-u_2(3)];
%隐含层和输出层权值调整
%调整w21
Sig1=sign(ypc./(uhc(1)+0.00001));
dw21=sum(error.*Sig1)*qo';
w21=w21+rate2*dw21+rate3*(w21_1-w21_2);
%调整w22
Sig2=sign(ypc./(uh(2)+0.00001));
dw22=sum(error.*Sig2)*qo';
w22=w22+rate2*dw22+rate3*(w22_1-w21_2);
%调整w23
Sig3=sign(ypc./(uh(3)+0.00001));
dw23=sum(error.*Sig3)*qo';
w23=w23+rate2*dw23+rate3*(w23_1-w23_2);
%输入层和隐含层权值调整
delta2=zeros(3,3);
wshi=[w21;w22;w23];
for t=1:1:3
delta2(1:3,t)=error(1:3).*sign(ypc(1:3)./(uhc(t)+0.00000001));
end
for j=1:1:3
sgn(j)=sign((h1i(j)-h1i_1(j))/(x1i(j)-x1i_1(j)+0.00001));
end
s1=sgn'*[r1(k),y1(k)];
wshi2_1=wshi(1:3,1:3);
alter=zeros(3,1);
dws1=zeros(3,2);
for j=1:1:3
for p=1:1:3
alter(j)=alter(j)+delta2(p,:)*wshi2_1(:,j);
end
end
for p=1:1:3
dws1(p,:)=alter(p)*s1(p,:);
end
w11=w11+rate1*dws1+rate3*(w11_1-w11_2);
%调整w12
for j=1:1:3
sgn(j)=sign((h2i(j)-h2i_1(j))/(x2i(j)-x2i_1(j)+0.0000001));
end
s2=sgn'*[r2(k),y2(k)];
wshi2_2=wshi(:,4:6);
alter2=zeros(3,1);
dws2=zeros(3,2);
for j=1:1:3
for p=1:1:3
alter2(j)=alter2(j)+delta2(p,:)*wshi2_2(:,j);
end
end
for p=1:1:3
dws2(p,:)=alter2(p)*s2(p,:);
end
w12=w12+rate1*dws2+rate3*(w12_1-w12_2);
%调整w13
for j=1:1:3
sgn(j)=sign((h3i(j)-h3i_1(j))/(x3i(j)-x3i_1(j)+0.0000001));
end
s3=sgn'*[r3(k),y3(k)];
wshi2_3=wshi(:,7:9);
alter3=zeros(3,1);
dws3=zeros(3,2);
for j=1:1:3
for p=1:1:3
alter3(j)=(alter3(j)+delta2(p,:)*wshi2_3(:,j));
end
end
for p=1:1:3
dws3(p,:)=alter2(p)*s3(p,:);
end
w13=w13+rate1*dws3+rate3*(w13_1-w13_2);
%参数更新
u_3=u_2;u_2=u_1;u_1=uh;
y_2=y_1;y_1=yn;
h1i_1=h1i;h2i_1=h2i;h3i_1=h3i;
x1i_1=x1i;x2i_1=x2i;x3i_1=x3i;
w11_1=w11;w11_2=w11_1;
w12_1=w12;w12_2=w12_1;
w13_1=w13;w13_2=w13_1;
%第二层权值
w21_1=w21;w21_2=w21_1;
w22_1=w22;w22_2=w22_1;
w23_1=w23;w23_2=w23_1;
end
%% 结果分析
time=0.001*(1:k);
figure(1)
subplot(3,1,1)
plot(time,r1,'r-',time,y1,'b-');
title('PID神经元网络控制','fontsize',12);
ylabel('控制量1','fontsize',12);
legend('控制目标','实际输出','fontsize',12);
subplot(3,1,2)
plot(time,r2,'r-',time,y2,'b-');
ylabel('控制量2','fontsize',12);
legend('控制目标','实际输出','fontsize',12);
subplot(3,1,3)
plot(time,r3,'r-',time,y3,'b-');
xlabel('时间(秒)','fontsize',12);ylabel('控制量3','fontsize',12);
legend('控制目标','实际输出','fontsize',12);
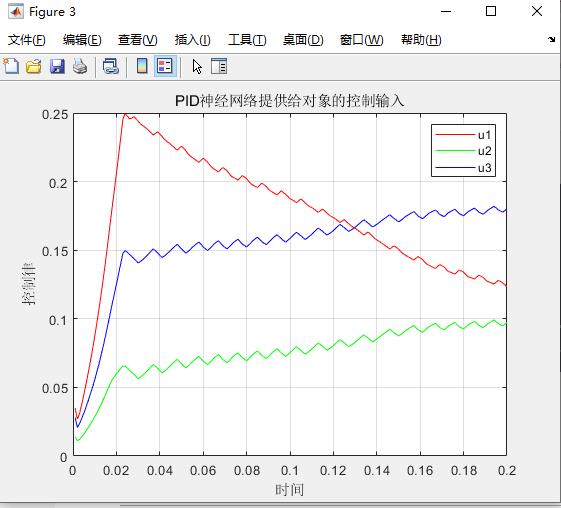
figure(2)
plot(time,u1,'r-',time,u2,'g-',time,u3,'b');
title('PID神经网络提供给对象的控制输入');
xlabel('时间'),ylabel('被控量');
legend('u1','u2','u3');grid
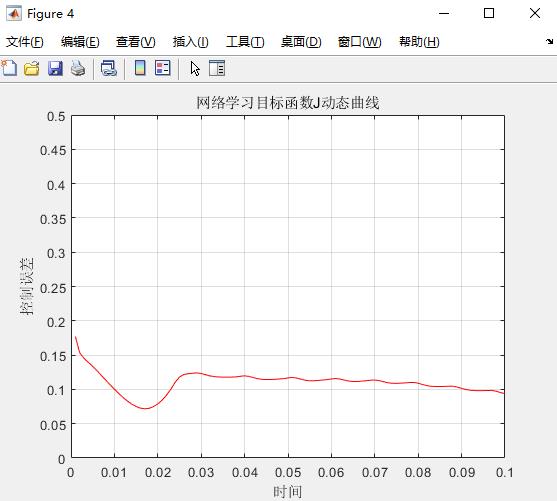
figure(3)
plot(time,J,'r-');
axis([0,0.2,0,1]);grid
title('控制误差曲线','fontsize',12);
xlabel('时间','fontsize',12);ylabel('控制误差','fontsize',12);
web browser http://www.ilovematlab.cn/thread-62563-1-1.html3.操作步骤与仿真结论

4.参考文献
[1]李明,杨成梧. PID神经网络的改进PSO学习算法[C]// 第25届中国控制会议. 0.
D224
5.完整源码获得方式
方式1:微信或者QQ联系博主
方式2:订阅MATLAB/FPGA教程,免费获得教程案例以及任意2份完整源码
 与50位技术专家面对面
与50位技术专家面对面
 20年技术见证,附赠技术全景图
20年技术见证,附赠技术全景图
以上是关于PSO神经网络PID基于matlab的PSO优化的神经网络PID训练和测试仿真的主要内容,如果未能解决你的问题,请参考以下文章