PCL学习笔记:PCL官方教程学习
Posted Sakurazzy
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了PCL学习笔记:PCL官方教程学习相关的知识,希望对你有一定的参考价值。
PCL学习笔记(二):PCL官方教程学习
本节学习PCL的官方文档教程,记录学习过程
PCD文件制作
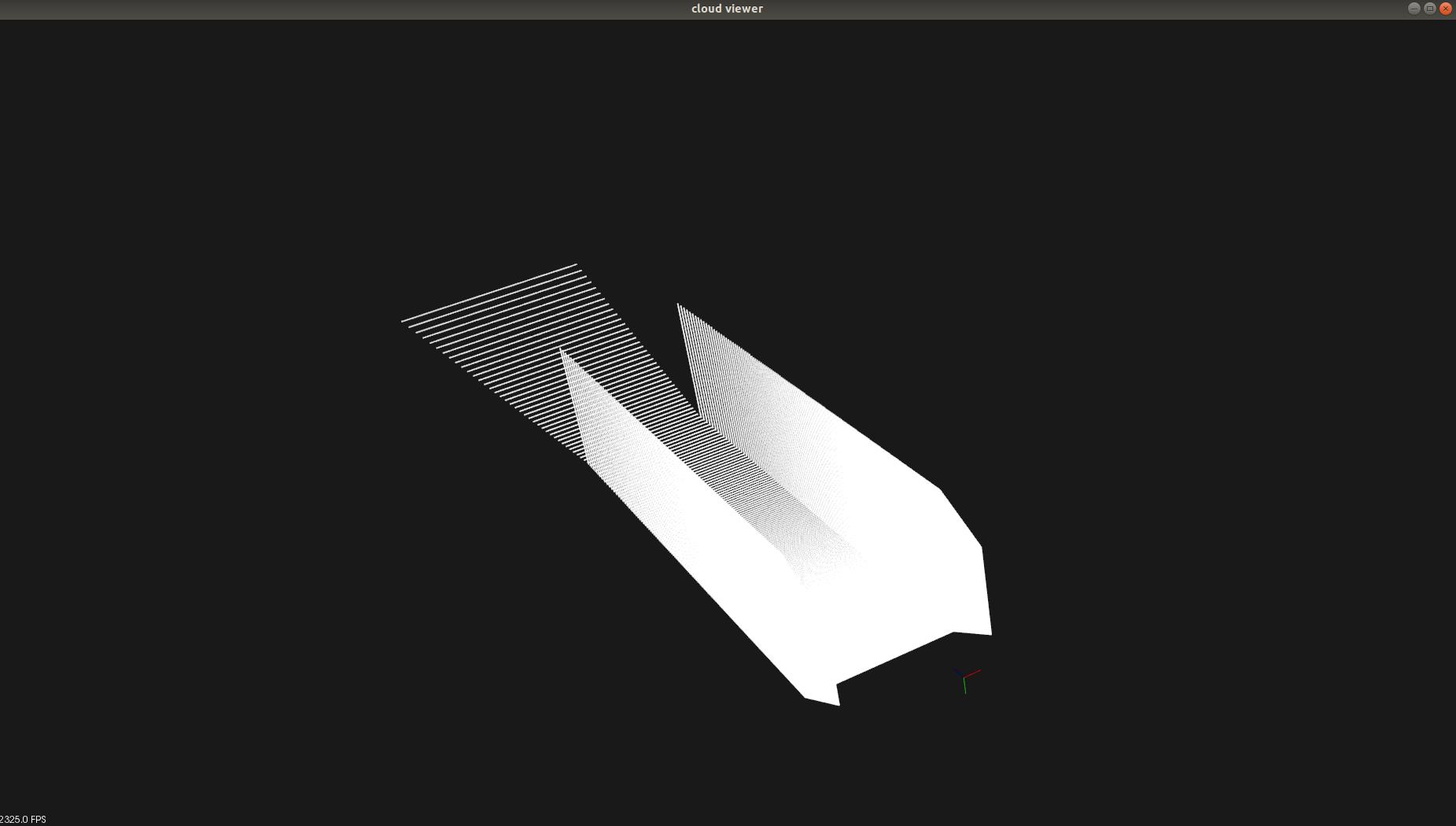
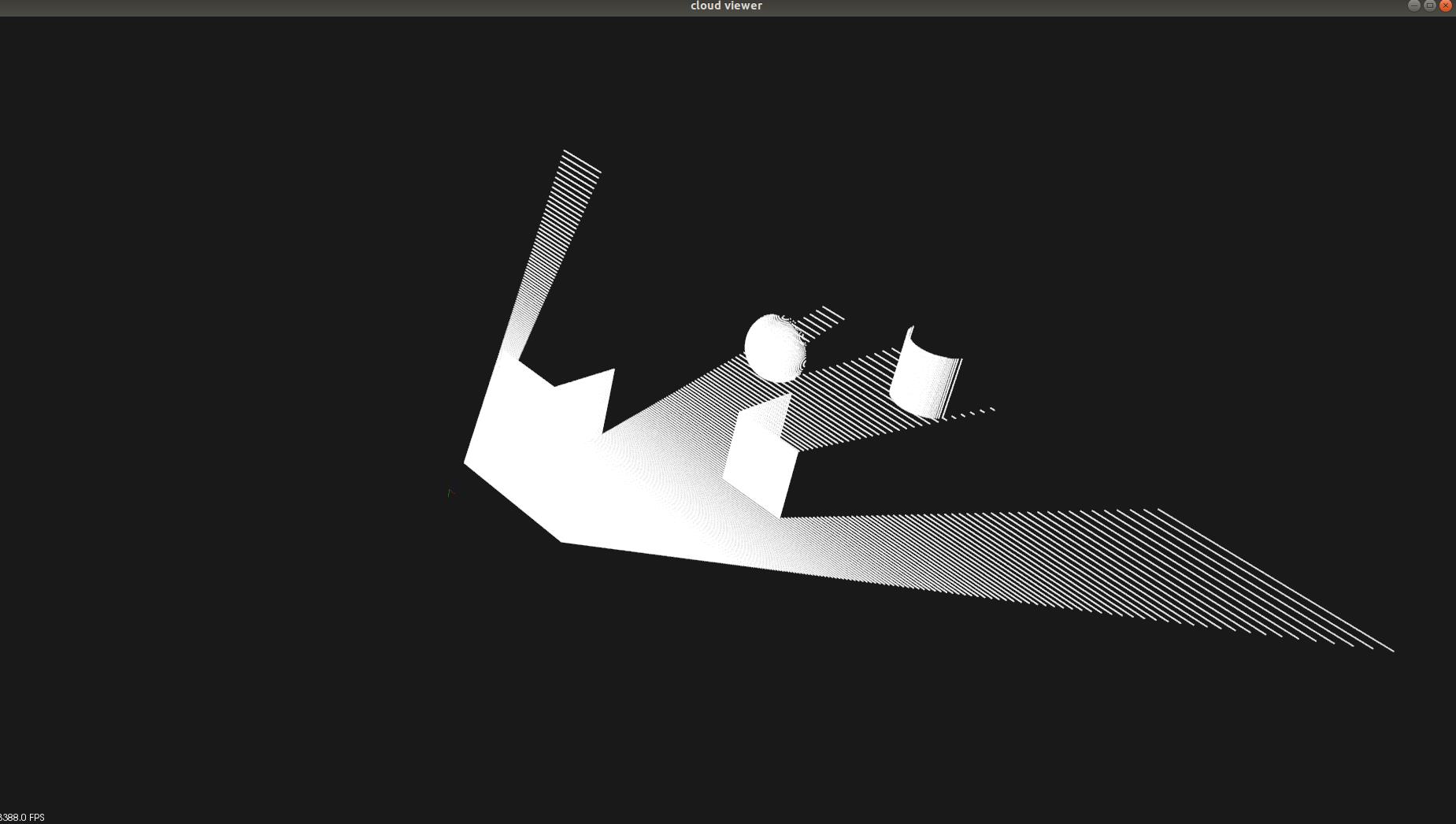
在gazebo中建立仿真环境,通过Realsense获取点云,保存为PCD文件,一个是走廊path_corner.pcd,一个是几何物体objects.pcd
Features
表面法线提取
参考官方文档:Estimating Surface Normals in a PointCloud
#include <ros/ros.h>
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/features/normal_3d.h>
#include <pcl_conversions/pcl_conversions.h>
#include <sensor_msgs/PointCloud2.h>
// 计算表面法线
pcl::PointCloud<pcl::Normal>::Ptr estimate_surface_normals( pcl::PointCloud<pcl::PointXYZ>::Ptr cloud)
// Create the normal estimation class, and pass the input dataset to it
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> ne;
ne.setInputCloud (cloud);
// Create an empty kdtree representation, and pass it to the normal estimation object.
// Its content will be filled inside the object, based on the given input dataset (as no other search surface is given).
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree (new pcl::search::KdTree<pcl::PointXYZ> ());
ne.setSearchMethod (tree);
// Output datasets
pcl::PointCloud<pcl::Normal>::Ptr cloud_normals (new pcl::PointCloud<pcl::Normal>);
// Use all neighbors in a sphere of radius 3cm
ne.setRadiusSearch (0.03);
// Compute the features
ne.compute (*cloud_normals);
return cloud_normals;
int main(int argc, char** argv)
// 读取pcd点云文件
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ>("./data/objects.pcd", *cloud) == -1)
PCL_ERROR("Couldn't read file objects.pcd\\n");
return(-1);
// 计算法线
pcl::PointCloud<pcl::Normal>::Ptr normals (new pcl::PointCloud<pcl::Normal>);
normals = estimate_surface_normals(cloud);
std::cout<<"normals points size:"<<normals->points.size()<<std::endl;
return 0;
其他参考博客:
pcl::Normal的定义以及cout
调用pcl计算法向量,并将法向量可视化
PCL:从法线计算到曲率计算并可视化
Keypoints
提取NARF关键点
参考代码:PCL系列——从深度图像(RangeImage)中提取NARF关键点
参考博客:
PCL关键点检测–NARF关键点
点云库PCL学习——NARF关键点
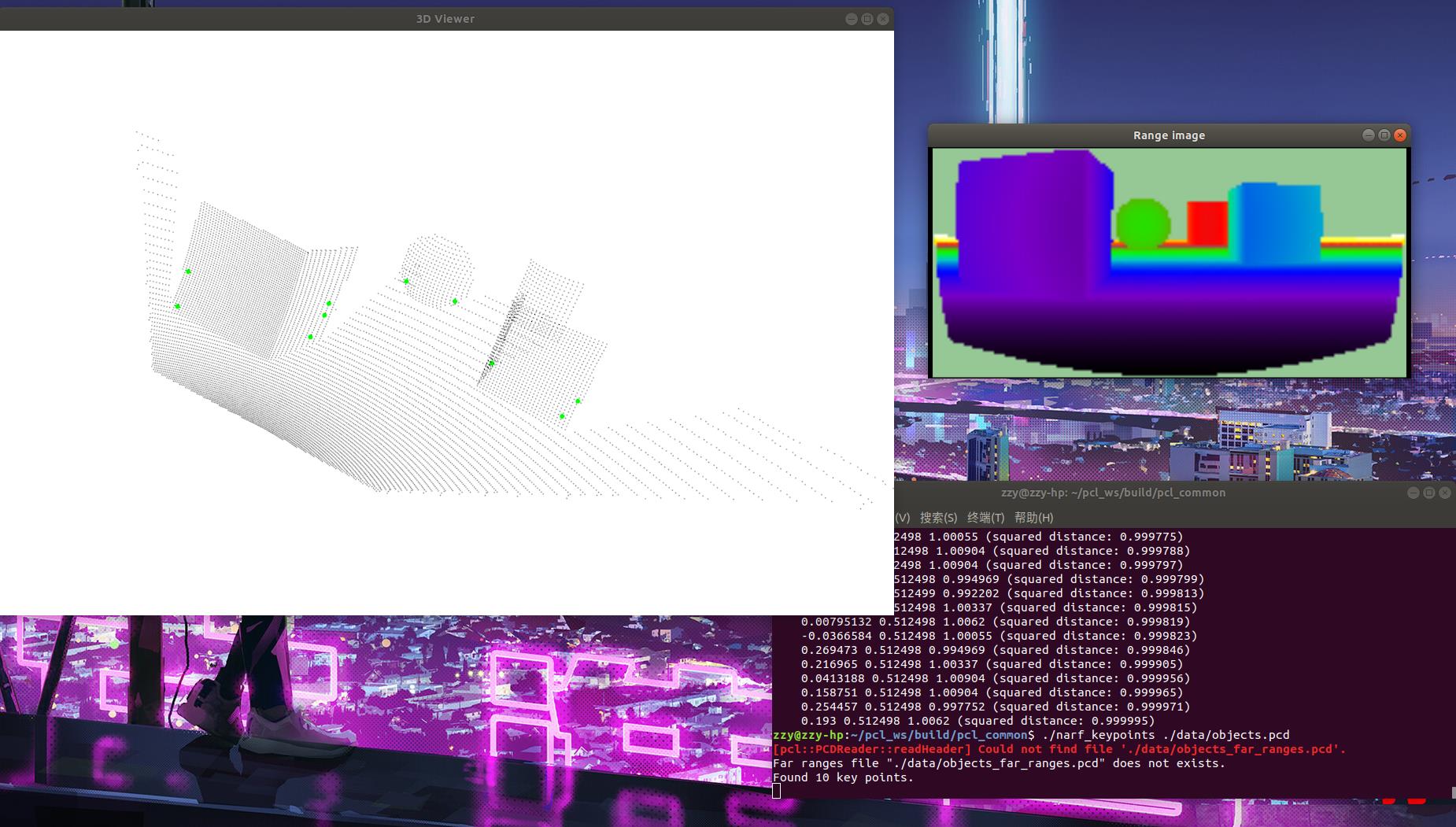
NARF(Normal Aligned Radial Feature)关键点是为了从深度图像中识别物体而提出的,关键点探测的重要一步是减少特征提取时的搜索空间,把重点放在重要的结构上。
对NARF关键点提取过程有以下要求:提取的过程必须将边缘以及物体表面变化信息考虑在内;关键点的位置必须稳定,可以被重复探测,即使换了不同视角;关键点所在的位置必须具有稳定的支持区域,可以计算描述子并进行唯一的法向量估计。
该方法提取步骤如下:
1、遍历每个深度图像点,通过寻找在邻近区域有深度突变的位置进行边缘检测。
2、遍历每个深度图像点,根据邻近区域的表面变化决定一种测度表面变化的系数,以及变化的主方向。
3、根据第二步找到的主方向计算兴趣值,表征该方向与其它方向的不同,以及该处表面的变化情况,即该点有多稳定
4、对兴趣值进行平滑滤波
5、进行无最大值压缩找到最终的关键点,即为NARF关键点
关键代码
//从点云数据,创建深度图像
float noise_level = 0.0;
float min_range = 0.0f;
int border_size = 1;
boost::shared_ptr<pcl::RangeImage> range_image_ptr (new pcl::RangeImage); //创建RangeImage对象(指针)
pcl::RangeImage& range_image = *range_image_ptr; //引用
range_image.createFromPointCloud (point_cloud, angular_resolution, pcl::deg2rad (360.0f), pcl::deg2rad (180.0f),
scene_sensor_pose, coordinate_frame, noise_level, min_range, border_size); //从点云创建深度图像
range_image.integrateFarRanges (far_ranges); //整合远距离点云
if (setUnseenToMaxRange)
range_image.setUnseenToMaxRange ();
//提取NARF关键点
pcl::RangeImageBorderExtractor range_image_border_extractor; //创建深度图像的边界提取器,用于提取NARF关键点
pcl::NarfKeypoint narf_keypoint_detector (&range_image_border_extractor); //创建NARF对象
narf_keypoint_detector.setRangeImage (&range_image);
narf_keypoint_detector.getParameters ().support_size = support_size;
//narf_keypoint_detector.getParameters ().add_points_on_straight_edges = true;
//narf_keypoint_detector.getParameters ().distance_for_additional_points = 0.5;
运行结果如下,提取了10个特征点
KdTree
A k-d tree, or k-dimensional tree, is a data structure used in computer science for organizing some number of points in a space with k dimensions. It is a binary search tree with other constraints imposed on it. K-d trees are very useful for range and nearest neighbor searches.
KdTree常用于进行范围搜索或K近邻搜索的计算
参考代码:How to use a KdTree to search
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/kdtree/kdtree_flann.h>
#include <vector>
#include <iostream>
int main(int argc, char** argv)
// 读取pcd点云文件
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ>("./data/objects.pcd", *cloud) == -1)
PCL_ERROR("Couldn't read file objects.pcd\\n");
return(-1);
// 构造kd tree
pcl::KdTreeFLANN<pcl::PointXYZ> kdtree;
kdtree.setInputCloud (cloud);
// 选取搜索点
pcl::PointXYZ searchPoint;
searchPoint.x = 0.1;
searchPoint.y = 0.1;
searchPoint.z = 0.1;
// K nearest neighbor search
int K = 10;
std::vector<int> pointIdxKNNSearch(K);
std::vector<float> pointKNNSquaredDistance(K);
std::cout << "K nearest neighbor search at (" << searchPoint.x << " " << searchPoint.y << " " << searchPoint.z<< ") with K=" << K << std::endl;
if ( kdtree.nearestKSearch (searchPoint, K, pointIdxKNNSearch, pointKNNSquaredDistance) > 0 )
for (std::size_t i = 0; i < pointIdxKNNSearch.size (); ++i)
std::cout << " " << (*cloud)[ pointIdxKNNSearch[i] ].x
<< " " << (*cloud)[ pointIdxKNNSearch[i] ].y
<< " " << (*cloud)[ pointIdxKNNSearch[i] ].z
<< " (squared distance: " << pointKNNSquaredDistance[i] << ")" << std::endl;
// Neighbors within radius search
std::vector<int> pointIdxRadiusSearch;
std::vector<float> pointRadiusSquaredDistance;
float radius = 1;
std::cout << "Neighbors within radius search at (" << searchPoint.x << " " << searchPoint.y << " " << searchPoint.z<< ") with radius=" << radius << std::endl;
if ( kdtree.radiusSearch (searchPoint, radius, pointIdxRadiusSearch, pointRadiusSquaredDistance) > 0 )
for (std::size_t i = 0; i < pointIdxRadiusSearch.size (); ++i)
std::cout << " " << (*cloud)[ pointIdxRadiusSearch[i] ].x
<< " " << (*cloud)[ pointIdxRadiusSearch[i] ].y
<< " " << (*cloud)[ pointIdxRadiusSearch[i] ].z
<< " (squared distance: " << pointRadiusSquaredDistance[i] << ")" << std::endl;
return 0;
Range Image
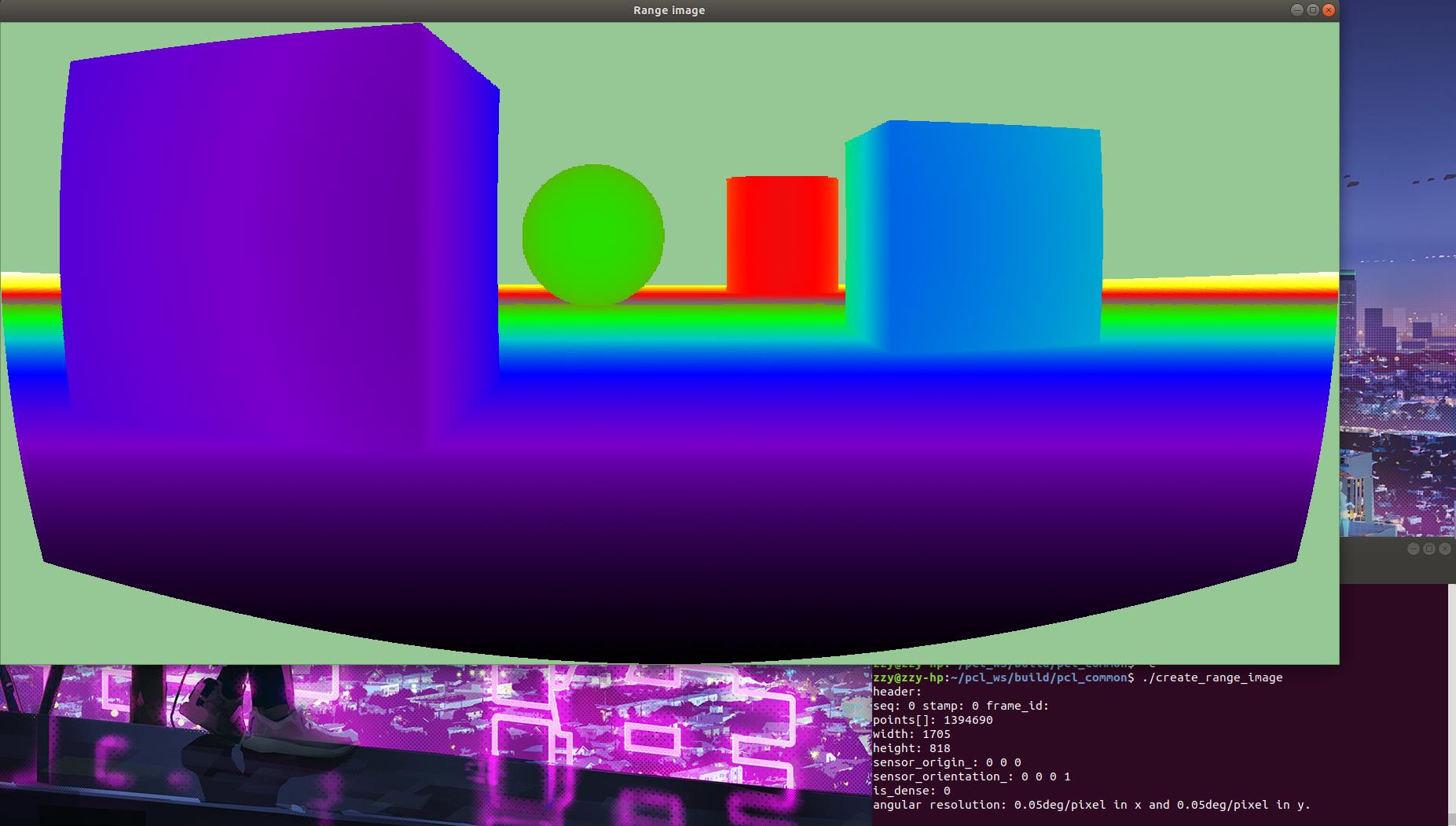
How to create a range image from a point cloud
参考代码:How to create a range image from a point cloud
根据输入的PCD文件生成Range Image,并进行可视化,结果如下图所示
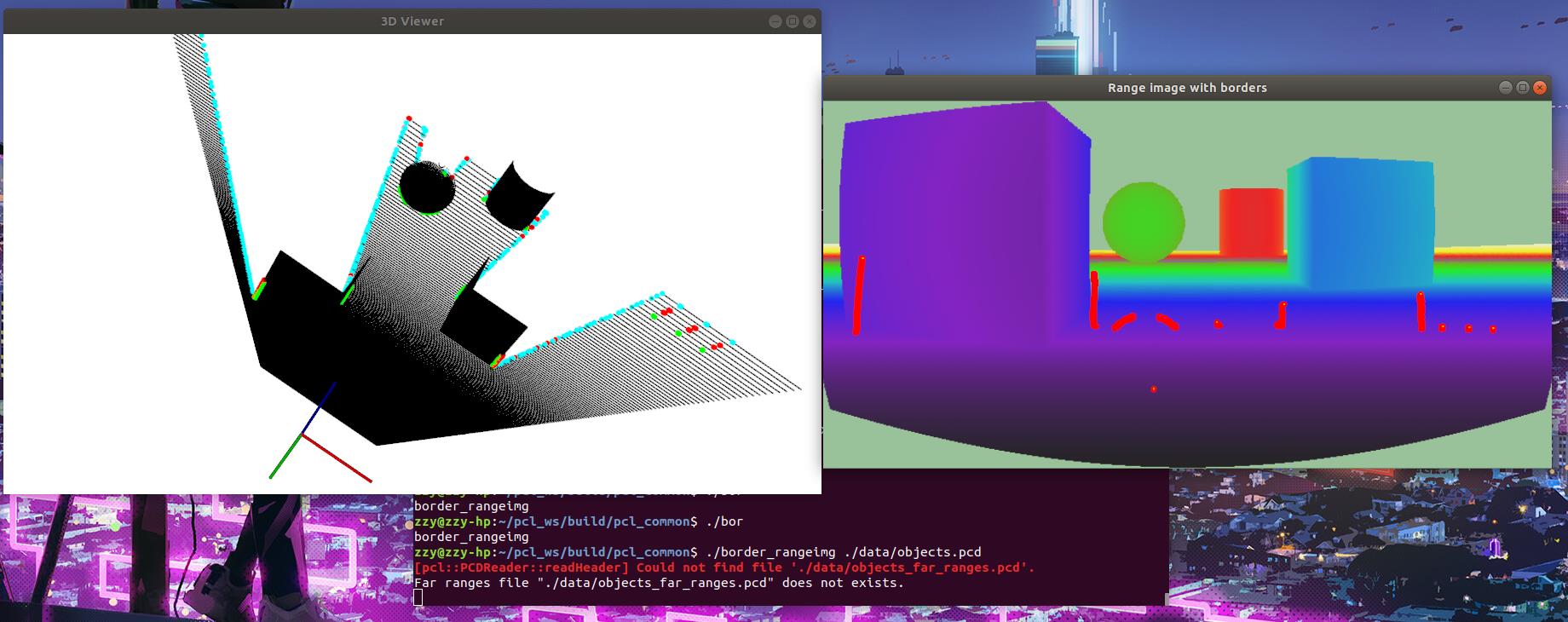
How to extract borders from range images
参考代码:
How to extract borders from range images
【点云处理技术之PCL】range image——提取深度图像的边界并可视化
从深度图像中提取三种边界:
object borders:目标最外层的边界
veil points:障碍物边界和阴影边界之间的插值点
shadow border:与遮挡相邻的背景点
关键代码
pcl::RangeImageBorderExtractor border_extractor(&range_image);
pcl::PointCloud<pcl::BorderDescription> border_descriptions;
border_extractor.compute(border_descriptions);
运行结果
以上是关于PCL学习笔记:PCL官方教程学习的主要内容,如果未能解决你的问题,请参考以下文章