论文阅读 Intention Recognition of Pedestrians and Cyclists by 2D Pose Estimation
Posted WXiujie123456
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了论文阅读 Intention Recognition of Pedestrians and Cyclists by 2D Pose Estimation相关的知识,希望对你有一定的参考价值。
Intention Recognition of Pedestrians and Cyclists by 2D Pose Estimation
IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS,2020
task
行人和骑自行车者过马路的意图理解
阅读记录

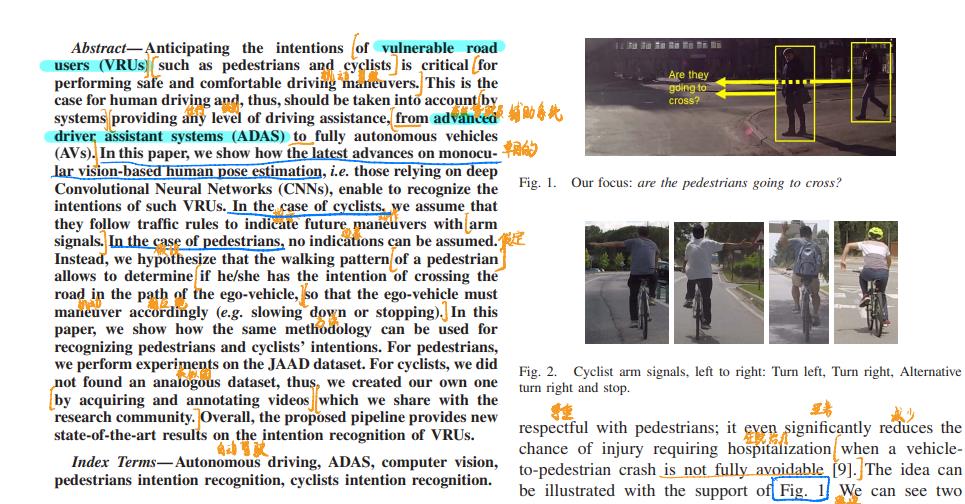
我们可以看到两个行人,一个显然停在路边,另一个正朝同一个路边走去。看看这些行人的(黄色)边框(BBs)的位置,我们会说他们此刻不在车辆的路径上。然而,我们想知道接下来会发生什么:停止的行人会突然过马路吗?行人是否会不停车地过马路?在肯定的情况下,车辆可以开始减速,以更安全的操作,增加乘客的舒适度和行人的信心(特别是对于自动驾驶车辆)。
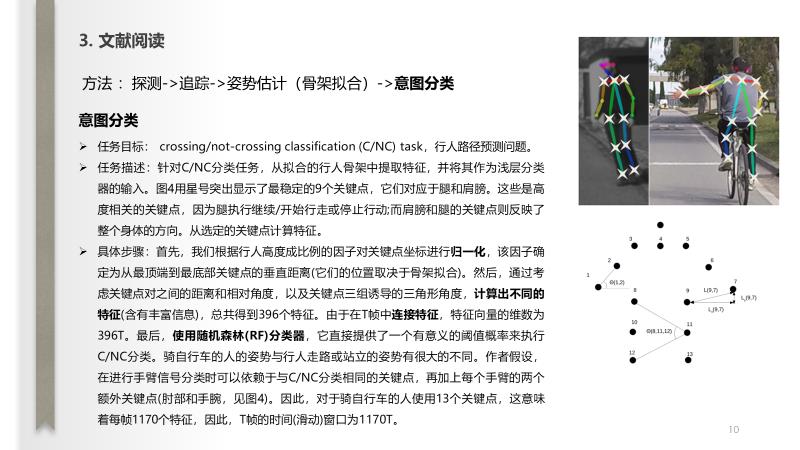
认识到骑车人的运动意图也是高度相关的,因为很多时候,自我车辆将需要超过他们。虽然我们不能假设行人会明确表明他们的意图,但对于骑自行车的人,我们可以利用交通规则。特别是,骑自行车的人必须用手臂信号指示未来的左/右转弯和停止动作(见图2)。

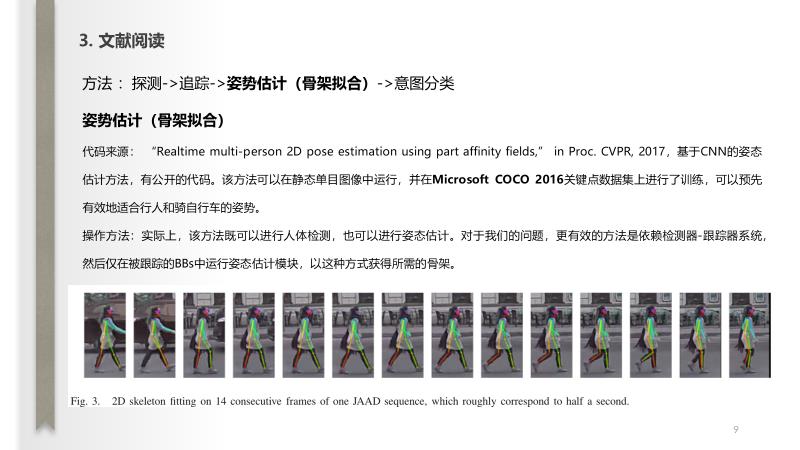
我们需要检测行人,跟踪行人,为每个行人调整骨骼(图3),并应用基于骨骼特征的C/NC分类器。自行车手信号分类遵循类似步骤。
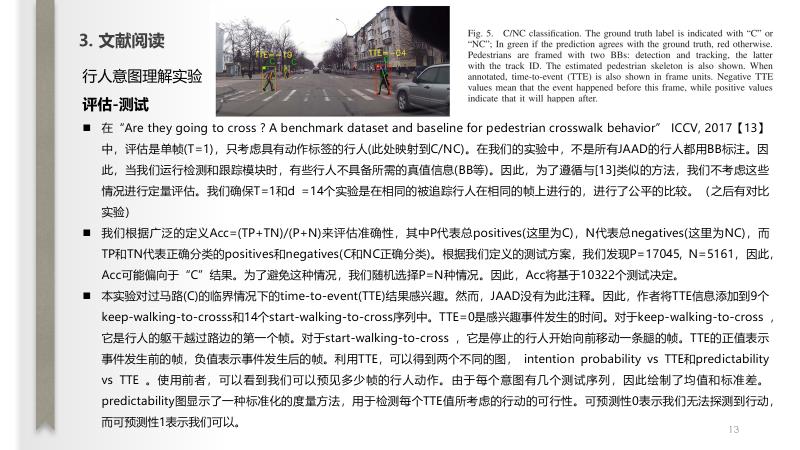
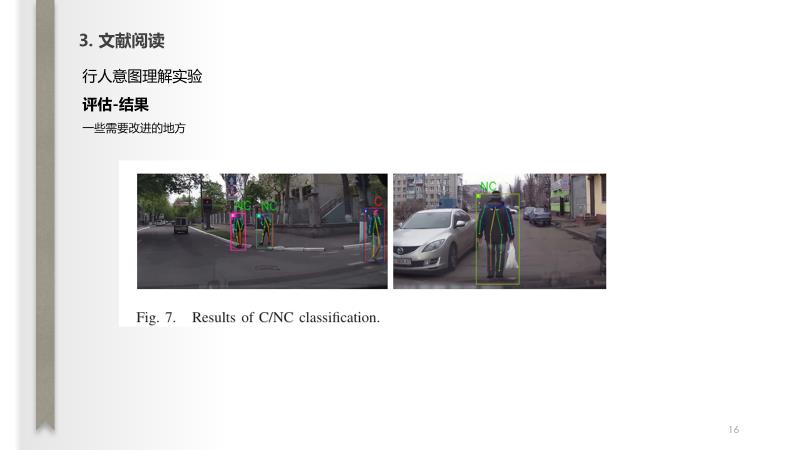
在图7中,有一个“C”被认为是错误(红色)。事实上,行人是在过马路,而不是与这辆自动驾驶的车相交的人。所以在评估中它应该被认为是正确的。相反,在图7中,系统将行人分类为“NC”,该行人并没有过马路,而是在汽车前方沿马路行走。现在这种情况被认为是正确的,但也可能被认为是错误的。另一方面,在这种情况下,我们可以使用基于位置的推理来知道行人处于危险的位置,这不再是一个预测行动的问题(如C/NC情况)。值得一提的是,我们已经观察到平行行走的汽车运动方向,往往被适当分类为NC;但是,要提供合理的定量分析,还需要更多的注释。


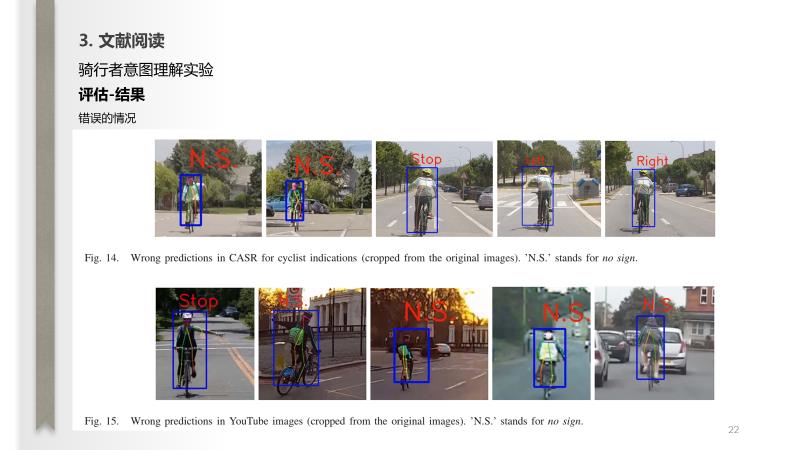
图14显示了一些对CASR和T=14的预测错误的孤立帧。前两种情况,因为检测BBs把手臂放在外面,影响了骨骼的装配。这可以通过系统地增加BB尺寸来解决,在测试时,BB尺寸被骨骼拟合程序视为感兴趣的区域。第三种情况,系统将未来的左转与停止指示混淆,然而,这种情况只发生在开始动作时,因为骑车人并不清楚会指示什么。接下来的几帧很清楚,这样系统就能预测出正确的机动。第四种情况,系统识别出骑车人正在指示一个动作,然而,停车标志与左转混淆了,这是因为骑车人手臂的位置相对比较直。关注手。最后一个例子,我们在这个特定的框架中看不到任何动作,而系统却指示了一个右转。事实上,在前几帧中,骑自行车的人实际上是在示意右转,开始结束标注的比较模糊。
图15显示了T=14时YouTube视频的错误情况。一种情况是由于骑自行车的手臂指示出BB的动作,两种情况是由于不利的条件(背包在后面,狭窄的BBs和低对比度的手臂背景)导致骨架不合适,还有两种情况是动作刚刚开始,还不够清楚(最后一种情况是图13左例中正确分类的左转动作开始)。
说明
以上内容均为作者本人平时阅读并且汇报使用,内容整理全凭个人理解,如有侵权,请联系我;内容如有错误,欢迎留言交流。转载请注明出处,并附有原文链接,谢谢!
此外,我还喜欢用ipad对论文写写画画(个人英文阅读的水平有限),做一些断句、重点勾画等,有兴趣大家可以按需下载:链接
更多论文分享,请参考: 深度学习相关阅读论文汇总(持续更新)
以上是关于论文阅读 Intention Recognition of Pedestrians and Cyclists by 2D Pose Estimation的主要内容,如果未能解决你的问题,请参考以下文章