移动机器人传感器之---激光雷达
Posted loongembedded
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了移动机器人传感器之---激光雷达相关的知识,希望对你有一定的参考价值。
文章目录
1. 点云数据

1.1 A厂家的A激光雷达
A厂家的A激光雷达角分辨率0.36°,每一帧的点云数目:360°/0.36°=1000;
10hz也就是每秒10帧(10个周期),则每秒的点云数目:1000*10=10000;

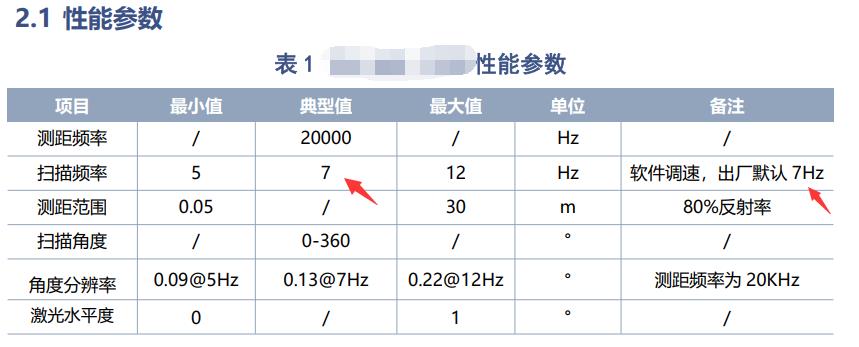
1.2 B厂家的B激光雷达
A厂家的B激光雷达角分辨率0.13°,每一帧的点云数目:360°/0.13°=2769.23;
7hz也就是每秒7帧(7个周期),则每秒的点云数目:2769.23*7=19386;
以上是关于移动机器人传感器之---激光雷达的主要内容,如果未能解决你的问题,请参考以下文章
ANYbotics利用Velodyne激光雷达传感器提升自主移动机器人