)
Posted wyy_persist
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了)相关的知识,希望对你有一定的参考价值。
18.检查点模型
截止到P265页
//2022.1.18日22:14开始学习
在第13章中,我们讨论了如何在培训完成后将模型保存和序列化到磁盘上。在上一章中,我们学习了如何在发生欠拟合和过拟合时发现它们,使你能够在保留训练时表现良好的模型的同时,剔除表现不佳的实验。
然而,您可能想知道是否有可能将这两种策略结合起来。当我们的损失/准确性提高时,我们可以序列化模型吗?或者,在培训过程中,是否可能只序列化最好的模型(即,损失最低或准确度最高的模型)?你的赌注。幸运的是,我们也不需要构建一个自定义回调函数——这个功能已经被集成到Keras中了。
18.1 检查点神经网络模型的改进
检查点的一个很好的应用是,在培训期间每次有改进时,都将网络序列化到磁盘上。我们将“改进”定义为损失的减少或准确性的增加——我们将在实际的Keras回调中设置这个参数。
代码略。
对保存权重的解释:

对于上述文件名的解释:
正如你所看到的,每个文件名有三个组件。第一个是静态字符串,权重。然后是历元数。文件名的最后一个组成部分是我们度量改进的指标,在本例中是验证丢失。
请记住,您的结果将与我的不匹配,因为网络是随机的,并初始化随机变量。根据初始值,您可能有显著不同的模型检查点,但在训练过程结束时,我们的网络应该获得类似的准确性(±几个百分点)。
18.2 检查点最佳NN
检查点改进也许最大的缺点在于,我们最终得到一堆extrafiles(不太可能)感兴趣,这是尤其如此,如果我们确认损失上下运动在训练时期——这些改进将被捕获和序列化到磁盘。在这种情况下,最好只保存一个模型,并在我们的度量在训练期间每次改进时简单地覆盖它。
幸运的是,完成这个操作就像更新ModelCheckpoint类以接受一个简单的字符串一样简单(即,没有任何模板变量的文件路径)。然后,每当我们的指标改进时,该文件就会被简单地覆盖。为了理解这个过程,让我们创建第二个名为cifar10_checkpoint_best.py的Python文件,并查看其中的差异。
在这里,您可以看到我们覆盖了cifar10_best_weights。如果我们的验证损失减少,hdf5文件与更新的网络。这有两个主要好处:
- 在训练过程的最后只有一个序列化文件——获得最低损失的模型历元。
- 我们没有捕捉到损失上下波动的“增量改进”。相反,我们只保存和覆盖现有的最佳模型,如果我们的度量获得的损失低于所有以前的时代。
18.3 总结
在本章中,我们回顾了如何在培训期间监控给定的指标(例如,验证丢失、验证准确性等),然后将高性能网络保存到磁盘。在Keras内部有两种方法来实现这一点:
- 检查点增量的改进。
- 检查点只在过程中找到最好的模型。
就我个人而言,比起前者,我更喜欢后者,因为它会产生更少的文件和一个代表培训过程中发现的最佳时期的输出文件。
19.可视化网络结构
截止到2022.1.18日晚上23:40
P273页
//2022.1.19日上午10:46开始阅读
我们还没有讨论的一个概念是架构可视化,即在网络中构造节点和相关连接的图,并将图保存为图像(即. png)到磁盘的过程。JPG,等等)。图中的节点表示层,而节点之间的连接表示网络中的数据流。
图像常常包含以下组件:
- 输入像素大小;
- 输出向量大小;
- 图层名称;
我们通常在(1)调试我们自己的自定义网络体系结构和(2)发布时使用网络体系结构可视化,其中体系结构的可视化比包含实际的源代码或试图构造一个表来传递相同的信息更容易理解。在本章的其余部分中,您将学习如何使用Keras构建网络架构可视化图,然后将图作为实际的映像序列化到磁盘上。
19.1 网络结构可视化的重要性
需要使用到网络结构可视化的情况:
- 在出版物中实现了网络架构但是并不清晰;
- 实现自定义的网络架构;
简而言之,网络可视化验证了我们的假设,即代码正确地构建了我们想要构建的模型。通过检查输出图形图像,您可以看到您的逻辑中是否存在缺陷。最常见的缺陷包括:
- 网络中不正确的层排序;
- 假设CONV或POOL层后的输出卷大小(不正确)。
每当实现一个网络架构时,我建议您在每个CONV和POOL层块之后将网络架构可视化,这将使您能够验证您的假设(更重要的是,及早捕获网络中的“bug”)。
卷积神经网络中的错误与应用程序中由边缘情况导致的其他逻辑错误不同。相反,一个CNN可以很好地训练和获得合理的结果,即使与不正确的层顺序,但是如果您没有意识到这个错误已经发生,您可能会报告您的结果,以为您做了一件事,但实际上做了另一件事。
19.1.1 安装需要的库graphviz和pydot-ng
19.1.2 可视化Keras网络
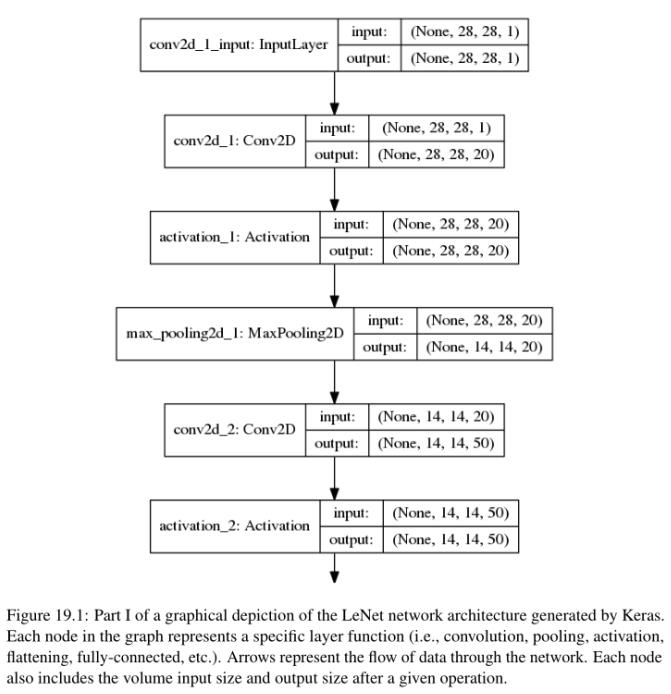
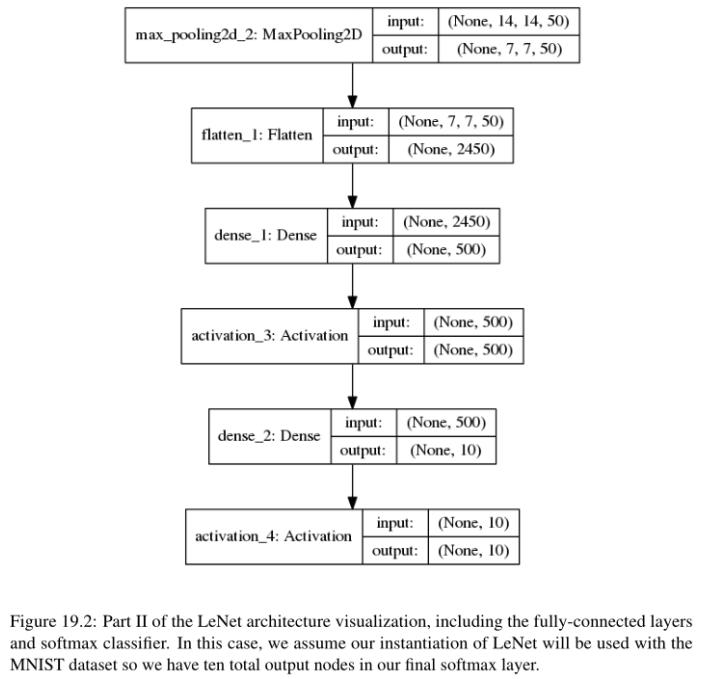
在这里,我们可以看到通过网络的数据流的可视化。每一层都表示为体系结构中的一个节点,然后连接到其他层,最终在应用softmax分类器后终止。注意网络中的每一层是如何包含一个输入和输出属性的——这些值是进入该层和退出该层时各自的体积空间维度的大小。
您可能想知道None在数据形状中表示什么(None, 28, 28, 1)。None实际上是我们的批处理大小。当可视化网络架构时,Keras不知道我们想要的批处理大小,所以它将该值保留为None。当训练时,这个值将改变为32、64、128等,或任何我们认为合适的批量大小。
19.2 总结
正如我们可以用代码表达LeNet架构一样,我们也可以将模型本身可视化为一个图像。当您开始深度学习之旅时,我强烈建议您使用这段代码来可视化您正在使用的任何网络,特别是如果您对它们不熟悉的话。确保您理解通过网络的数据流,以及基于CONV、POOL和FC层的容量大小如何变化,将使您对体系结构有更深入的了解,而不仅仅是依赖于代码。
在实现我自己的网络架构时,我在实际编写网络代码时,每隔2-3个层块就将架构可视化,以此验证我的思路是否正确——这一操作有助于我尽早发现逻辑中的错误或缺陷。
20. 开箱即用的分类cnn
到目前为止,我们已经学会了如何从零开始训练我们自己的自定义卷积神经网络。大部分这些cnn更浅一侧(和在较小的数据集),所以他们可以很容易地训练我们的cpu,而无需诉诸更多昂贵的gpu,让我们掌握基本的神经网络和深度学习不用空我们的口袋。
然而,由于我们一直在研究更浅层的网络和更小的数据集,我们还不能充分利用深度学习提供给我们的全部分类能力。幸运的是,Keras库附带了五个在ImageNet数据集上预先训练过的cnn:
- VGG16
- VGG19
- ResNet50
- Inception V3
- Xception
正如我们在第5章中讨论的,ImageNet大规模视觉识别挑战(ILSVRC)[42]的目标是训练一个模型,可以正确地将输入图像分类为1000个单独的对象类别。这1000个图像类别代表了我们在日常生活中遇到的对象类别,比如狗、猫、各种家居用品、车辆类型等等。
这意味着,如果我们利用在ImageNet数据集上预先训练的cnn,我们可以立即识别所有这1000个对象类别——不需要训练!一个完整的对象类别列表,你可以使用预先训练的ImageNet模型识别,可以在这里找到http://pyimg.co/x1ler。
在本章中,我们将回顾在Keras库中预先训练的最先进的ImageNet模型。然后,我将演示如何编写Python脚本来使用这些网络对我们自己的定制图像进行分类,而无需从头开始训练这些模型。
20.1 在Keras库中最先进的CNN
参数化学习的两个方面:
- 定义一个机器学习模型,它可以在训练期间从我们的输入数据中学习模式(这需要我们在训练过程中花费更多的时间),但测试过程要快得多。
- 获得一个可以使用少量参数定义的模型,这些参数可以很容易地表示网络,而不管训练的大小。
因此,我们的实际模型大小是其参数的函数,而不是训练数据的数量。我们可以在100万张图像的数据集或100张图像的数据集上训练非常深入的CNN(如VGG或ResNet),但结果输出的模型大小将是相同的,因为模型大小是由我们选择的架构决定的。
其次,神经网络承担了绝大部分的工作。我们将大部分时间花在训练cnn上,这可能是由于架构的深度、训练数据的数量,也可能是为了调整超参数而进行的实验数量。
gpu等优化硬件使我们能够加速训练过程,因为我们需要在反向传播算法中执行前向传递和后向传递——正如我们已经知道的,这个过程是我们的网络实际学习的过程。然而,一旦网络被训练,我们只需要执行forward pass对给定的输入图像进行分类。前向传递速度大大加快,使我们能够使用CPU上的深度神经网络对输入图像进行分类。
在大多数情况下,本章中介绍的网络架构无法在CPU上实现真正的实时性能(为此我们需要GPU)——但这没关系;您仍然可以在您自己的应用程序中使用这些预先训练过的网络。如果您有兴趣学习如何在具有挑战性的ImageNet数据集上从头开始训练最先进的卷积神经网络,请务必参考本书的ImageNet Bundle,我在那里演示了这一点。
20.1.1 VGG16 和 VGG19
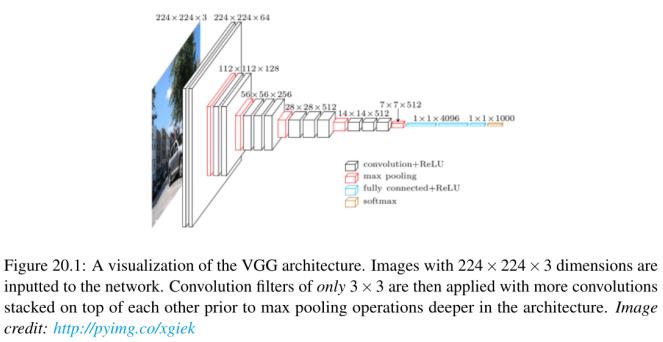
VGG网络架构(图20.1)由Simonyan和Zisserman在2014年的论文《Very Deep Convolutional Networks for Large Scale Image Recognition》中引入[95]。
正如我们在第15章中讨论的那样,VGG网络家族的特征是只使用3 × 3卷积层,它们彼此叠加在一起,且深度不断增加。减少卷大小是由最大池处理的。两个完全连接的层(每个层有4,096个节点)之后是一个softmax分类器。
在2014年,16和19层网络被认为是非常深的,尽管我们现在已经有了ResNet架构,可以成功地训练深度为50-200的ImageNet和超过1000的CIFAR-10。不幸的是,VGG有两个主要缺点:
- 这是痛苦的慢训练(幸运的是,我们只测试输入图像在本章)。
- 网络权值本身相当大(就磁盘空间/带宽而言)。由于其深度和全连接节点的数量,VGG16序列化的权重文件为533MB,而VGG19为574MB。
幸运的是,这些权重只需要下载一次——从那里我们可以将它们缓存到磁盘。
20.1.2 ResNet
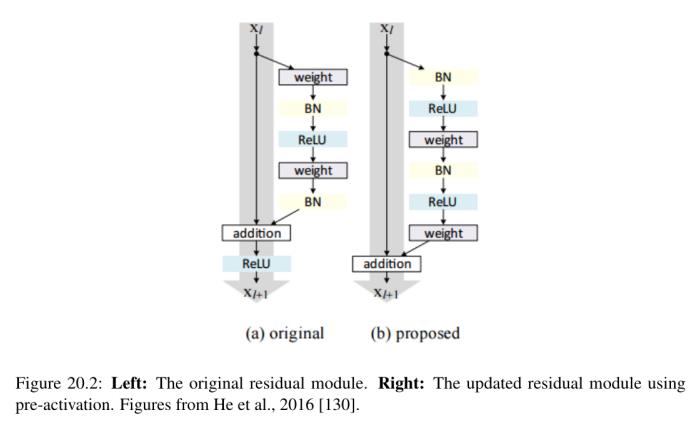
首先介绍了他在他们一份2015年的论文等人,深残余学习图像识别[96],ResNet架构已经成为一个具有开创性的工作深度学习文学,证明极深的网络可以使用标准训练SGD(和一个合理的初始化函数)通过使用剩余模块。
进一步的准确性可以通过更新残差模块来使用身份映射来获得(图20.2),这在他们2016年的后续出版物《深度残差网络中的身份映射》中得到了证明[130]。
也就是说,请记住,Keras核心库中的ResNet50(即50个权重层)实现是基于前一篇2015年的论文。尽管ResNet比VGG16和VGG19要深得多,但由于使用了全局平均池而不是全连接层,模型尺寸实际上要小得多,这使得ResNet50的模型尺寸减少到102MB。
如果你有兴趣学习ResNet架构的更多信息,包括剩余的模块和它是如何工作的,请参考实践者Bundle和ImageNet Bundle,其中深入介绍了ResNet。
20.1.3 Inception V3

“盗梦空间”模块(以及最终的盗梦空间架构)是由Szegedy等人在2014年的论文《深入卷积》中引入的[97]。《盗梦空间》的目标模块(图20.3)是作为“多层次特征提取器”通过计算1×1,3×3,那5×5卷绕在同一个模块中网络——然后thesefilters堆放在通道的输出尺寸被送入下一层之前的网络。
这个架构的最初的化身被称为GoogLeNet,但是随后的表现被简单地命名为Inception vN,其中N指的是谷歌发布的版本号。Keras核心中包含的Inception V3架构来自后期由Szegedy等人出版的《重新思考计算机视觉的Inception架构》(2015)[131],其中提出了对Inception模块的更新,以进一步提高ImageNet分类的准确性。盗梦空间V3的权重比VGG和ResNet都小,只有96MB。
有关Inception模块如何工作的更多信息(以及如何从头开始训练GoogLeNet),请参阅实践者Bundle和ImageNet Bundle。
20.1.4 Xception
Xception是由François Chollet本人提出的,他是Keras库的创造者和主要维护者,他在2016年的论文《Xception: Deep Learning with depth -》中提出[132]。Xception是Inception体系结构的扩展,它用深度可分离的卷积替换标准的Inception模块。Xception权值是Keras库中包含的预训练网络中最小的,为91MB。
20.1.5 能不能再小一点
虽然它没有包含在Keras库中,但我想说的是,当我们需要一个小的内存空间时,经常会使用SqueezeNet架构[127]。SqueezeNet非常小,只有4.9MB,并且通常在需要对网络进行培训,然后通过网络和/或资源受限的设备部署网络时使用。
再次,SqueezeNet不包括在Keras的核心中,但我确实演示了如何从ImageNet集合内的ImageNet数据集上从头开始训练它。
20.2 使用预先训练的ImageNet cnn分类图像
我们已经知道,CNN将图像作为输入,然后返回一组与类标签对应的概率作为输出。在ImageNet上训练的CNN的典型输入图像大小为224 × 224、227 × 227、256 × 256和299 × 299;然而,您也可能看到其他方面。
VGG16、VGG19和ResNet都接受224 × 224个输入图像,而Inception V3和Xception需要229 × 229个像素输入,如下代码块所示:
# 初始化输入图像的形状及预处理函数(可能会根据选择的模型进行改变)
inputShape = (224, 224)
preprocess = imagenet_utils.preprocess_input
# 如果我们是用Inception V3或者Xception,那么改变输入的图片大小
if args["model"] in ("inception", "xception"):
inputShape = (299, 299)
preprocess = preprocess_input
在这里,我们初始化我们的inputShape为224 × 224像素。我们还将我们的预处理函数初始化为来自Keras的标准preprocess_input(它执行均值减法,一种我们在实践者包中介绍的规范化技术)。然而,如果我们使用Inception或Xception,我们需要将inputShape设置为299 × 299像素,然后更新预处理以使用执行不同类型缩放http://pyimg.co/3ico2的单独预处理功能。

第58行使用MODELS字典和——model命令行参数来获取正确的网络类。然后在第59行使用预先训练的ImageNet权值实例化CNN。
同样,请记住,VGG16和VGG19的权重是500MB。ResNet权重≈100MB,而Inception和Xception权重在90-100MB之间。如果这是您第一次为给定的网络架构运行这个脚本,这些权重将(自动)下载并缓存到您的本地磁盘。根据你的网速,这可能需要一段时间。但是,一旦下载了权重,就不需要再次下载它们,从而允许imagenet_pretraining .py的后续运行速度更快。
我们的网络现在已经加载完毕,可以对图像进行分类了——我们只需要对图像进行预处理,以便进行分类:
# 从磁盘加载预训练模型权重,如果是第一次,那么需要下载
print("[INFO] loading ...".format(args["model"]))
Network = MODELS[args["model"]]
model = Network(weight="imagenet")
# 加载图像,并使用Keras库的helper助手,保证输入图像和inputShape保持一致
print("[INFO] loading and pre-processing image...")
image = load_img(args["image"], target_size=inputShape)
image = img_to_array(image)
# 调整输入图像的形式
image = np.expand_dims(image, axis=0)
# 使用恰当的预处理函数处理图片
image = preprocess(image)
第65行使用提供的inputShape从磁盘加载输入图像,以调整图像的宽度和高度。假设我们使用“通道最后”排序,我们的输入图像现在被表示为NumPy数组的形状(inputShape[0], inputShape[1], 3)。
但是,我们使用cnn对图像进行批量训练/分类,所以我们需要通过np在数组中增加一个额外的维度。expand_dims函数在第72行。后调用np。expand_dims,我们的图像现在将有形状(1,inputShape[0], inputShape[1], 3),同样,假设通道最后排序。忘记添加这个额外的维度将导致在调用模型的.predict方法时出现错误。
最后,第76行调用适当的预处理函数来执行均值减法和/或缩放。
现在,我们准备将图像通过网络传递,并获得输出分类:
# 分类图像
print("[INFO] classifying image with ...".format(args["model"]))
preds = model.predict(image)
P = imagenet_utils.decode_predictions(preds)
# 循环所有的预测,并显示排名前5的预测
for (i, (imagenetID, label, prob)) in enumerate(P[0]):
print(". : :2f%".format(i + 1, label, prob * 100))
在80号线上调用。predict返回来自CNN的预测。给出这些预测后,我们将它们传递到ImageNet实用函数.decode_predictions中,以获得ImageNet类标签id、“人类可读的”标签以及与每个类标签相关的概率列表。前5个预测(即概率最大的标签)然后打印到终端的第85行和第86行。
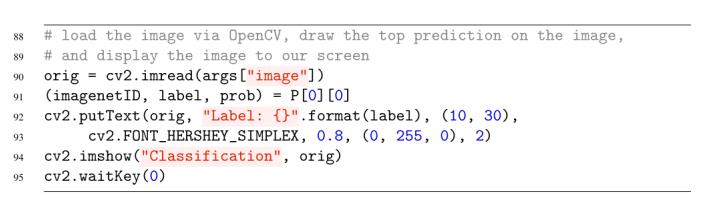
我们最终的代码块将处理通过OpenCV从磁盘加载我们的图像,在图像上绘制#1预测,并最终显示到我们的屏幕上:
20.2.1 分类结果
使用以下命令实现使用预训练模型预测结果输出。


预测结果展示。
20.3 总结
在本章中,我们回顾了在Keras库的ImageNet数据集上预先训练的五个卷积神经网络:

然后,我们学习了如何使用这些体系结构对您自己的输入图像进行分类。假设ImageNet数据集包含1000个您在日常生活中可能遇到的常见对象类别,这些模型将成为非常好的“通用”分类器。根据您自己学习深度学习的动机和最终目标,仅这些网络就足以构建您想要的应用程序。
但是,如果读者有兴趣学习更高级的技术,以便在更大的数据集上训练更深入的网络,我绝对建议您阅读实践者Bundle。如果读者想要完整的体验,并了解如何在具有挑战性的ImageNet数据集上训练这些最先进的网络,请参阅ImageNet Bundle。
21.案例学习:使用CNN破解验证码
到目前为止,在这本书中,我们已经使用了为我们预先编译和标记的数据集-但如果我们想要开始创建我们自己的自定义数据集,然后训练一个CNN呢?在本章中,我将展示一个完整的深度学习案例研究,它将给你一个例子:
- 下载一组图片;
- 标注并注解图片用于训练;
- 训练一个CNN网络在自己的数据集上;
- 评价并测试训练过的CNN
我们将下载的图像数据集是一组验证码图像,用于防止机器人自动注册或登录到一个给定的网站(或更糟的是,试图强行进入某人的帐户)。
一旦我们下载了一组验证码图像,我们需要手动标记验证码中的每一个数字。我们将发现,获取和标记一个数据集可能是战斗的一半(如果不是更多的话)。取决于你需要多少数据,是多么容易获得,以及是否需要标签的数据(例如,分配一个真实图像标签),它可以是一个昂贵的过程,无论是从时间和/ orfinances(如果你花钱雇人标签的数据)。
因此,只要有可能,我们就尝试使用传统的计算机视觉技术来加速标记过程。在本章的背景下,如果我们使用图像处理软件,如Photoshop或GIMP,手动提取验证码图像中的数字来创建我们的训练集,可能会花费我们几天不间断的工作来完成任务。
然而,通过应用一些基本的计算机视觉技术,我们可以在不到一个小时的时间内下载并标记我们的训练集。这也是我鼓励深度学习从业者投资计算机视觉教育的众多原因之一。书等实际Python和OpenCV旨在帮助您迅速掌握计算机视觉和OpenCV的基本面——如果你是认真的掌握深度学习应用于计算机视觉,你应该好好学习的基础广泛的计算机视觉和图像processingfield。
我还想提到的是,现实世界中的数据集不像像MNIST、CIFAR-10和ImageNet这样的基准数据集,在这些基准数据集中,图像被整齐地标记和组织,我们的目标只是在数据上训练一个模型并对其进行评估。这些基准数据集可能是具有挑战性的。但在现实世界中,困难往往在于获取(标记的)数据本身——在许多情况下,标记的数据比通过在数据集上训练网络而获得的深度学习模型更有价值。
例如,如果您正在运营一家负责为美国政府创建一个定制的自动牌照识别(ANPR)系统的公司,您可能会花费数年时间来构建一个健壮的、大规模的数据集,同时评估各种识别牌照的深度学习方法。积累如此庞大的标签数据集将使你比其他公司更有竞争优势——在这种情况下,数据本身比最终产品更有价值。
你的公司更有可能被收购,仅仅因为你拥有对大量标签数据集的独家权利。建立一个令人惊叹的深度学习模式识别车牌的价值只会增加你的公司,但同样,带安全标签的数据获取和复制是昂贵的,如果你自己的数据集的关键,很难(如果不是不可能的话)复制,毫无疑问,你的公司的主要资产是数据,而不是深度学习。
在本章的其余部分,我们将看看如何获取图像数据集,对其进行标记,然后应用深度学习来破解验证码系统。
21.1 用CNN破解验证码
这一章被分成许多部分,以帮助保持它的组织和易于阅读。在第一部分中,我将讨论我们正在使用的验证码数据集,并讨论负责任披露的概念——当涉及到计算机安全时,您应该总是这样做。
从这里我将讨论我们项目的目录结构。然后我们创建一个Python脚本来自动下载一组图像,我们将使用这些图像进行培训和评估。
下载完我们的图片后,我们需要使用一些计算机视觉来帮助我们对图片进行标记,这使得这个过程比在GIMP或Photoshop等图片软件中简单地裁剪和标记要容易得多,速度也快得多。一旦我们对数据进行标记,我们将训练LeNet架构——正如我们将发现的那样,我们能够打破验证码系统,并在不到15个epoch内获得100%的准确性。
21.1.1 关于负责任披露的说明
生活在美国东北部/中西部地区,如果没有E-ZPass,很难在主要高速公路上出行[133]。E-ZPass是一种电子收费系统,用于许多桥梁、州际公路和隧道。游客只需购买一个易通转发器,将其放在汽车的挡风玻璃上,就可以享受不用停车就能快速通行的能力,因为易通账户上的信用卡会收取任何通行费。
- ZPass让过路费变成了一个更加“享受”的过程(如果有的话)。与其在需要进行实体交易的地方没完没了地排队(比如,把钱交给收银员,拿到找零,打印报销收据,等等),你可以在快车道上快速行驶而不停车——这为你节省了很多时间,也少了很多麻烦(不过你还是得付过路费)。
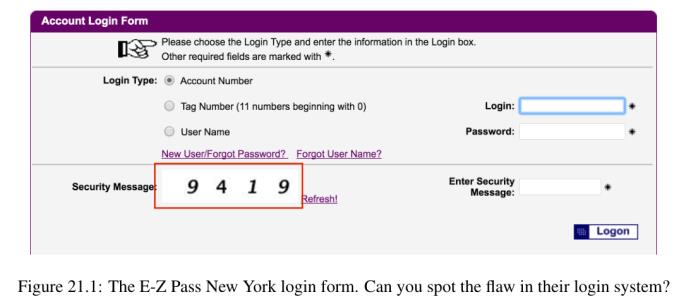
我花了很多时间在马里兰和康涅狄格之间旅行,这两个州沿着美国I-95走廊。I-95公路走廊,尤其是在新泽西州,有太多的收费站,所以对我来说,买快易通通行证是一个很简单的决定。大约一年前,我的易趣通账户上的信用卡过期了,我需要更新它。我去了E-ZPass纽约网站(我购买E-ZPass的州)登录并更新我的信用卡,但我突然停了下来(图21.1)。
你能找出这个系统的缺陷吗?他们的“验证码”不过是在纯白色背景上的四位数字,这是一个主要的安全风险——对于那些拥有基本计算机视觉的人来说或者深度学习体验可以开发一款软件来破解这个系统。
这就是负责任披露概念的由来。负责任的披露是一个计算机安全术语,用于描述如何披露漏洞。在检测到威胁后,不要立即将其发布到互联网上让所有人都看到,而是要首先联系利益相关者,确保他们知道存在问题。涉众可以尝试修补软件并解决漏洞。
简单地忽略漏洞并隐藏问题是一种错误的安全性,这是应该避免的。在理想情况下,该漏洞在公开披露之前就已解决。
然而,当利益相关者不承认问题或者没有在合理的时间内解决问题时,就会产生一个道德难题——你是否隐藏问题并假装它不存在?或者你会披露它,让更多的人注意到问题,从而更快地解决问题?负责任的披露是指你首先将问题提交给利益相关者(负责任)——如果问题没有解决,那么你需要披露问题(披露)。
为了证明E-ZPass NY系统面临的风险,我训练了一个深度学习模型来识别验证码中的数字。然后我写了第二个Python脚本(1)自动填充我的登录凭证(2)打破验证码,允许我的脚本访问我的帐户。
在这种情况下,我只是自动登录我的帐户。使用这个“功能”,我可以自动更新信用卡,生成过路费报告,甚至在我的易通卡中添加一辆新车。但一些不法分子可能会利用这一方法,以暴力方式进入客户的账户。
在我写这一章的一年前,我通过电子邮件、电话和Twitter联系了E-ZPass。他们确认收到了我的信息;然而,尽管进行了多次接触,但没有采取任何措施来解决这个问题。
在本章的其余部分,我将讨论如何使用E-ZPass系统来获取验证码数据集,然后我们将对其进行标记和训练深度学习模型。我不会分享Python代码自动登录到一个帐户-这是在责任披露的边界之外,所以请不要问我这段代码。
我真诚的希望在这本书出版的时候,E-ZPass NY将更新他们的网站并解决验证码漏洞,从而使本章成为将深度学习应用于手工标记数据集的一个很好的例子,没有任何漏洞威胁。
请记住,所有的知识都伴随着责任。这种知识,在任何情况下,都不应用于邪恶或不道德的原因。本案例研究是一种方法,用于演示如何获取和标记自定义数据集,然后在此基础上训练深度学习模型。
21.1.2 验证码破解器的目录结构
在pyimagesearch模块中的目录:
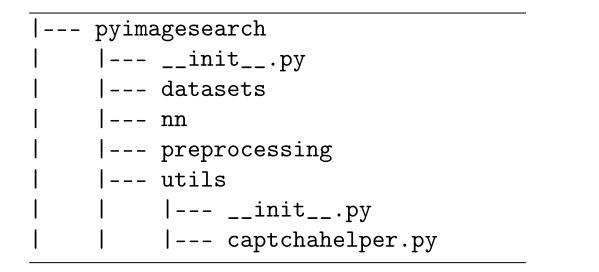
我们还将在pyimagessearch模块之外创建第二个目录,这个名为captcha_breaker,并包含以下文件和子目录:

captcha_breaker目录是我们所有的项目代码存储的地方,用来破坏图像验证码。我们将在dataset目录中存储我们将手工标记的带标签的数字。我喜欢用下面的目录结构模板来组织我的数据集:

因此,我们的数据集目录将具有以下结构:

其中dataset是根目录,1-9是可能的数字名,example.jpg将是给定数字的示例。
下载目录将存储从E-ZPass网站下载的原始验证码。jpg文件。在输出目录中,我们将存储经过训练的LeNet体系结构。
顾名思义,download_images.py脚本将负责实际下载示例验证码并将它们保存到磁盘。一旦我们下载了一组验证码,我们将需要从每个图像中提取数字并手工标记每个数字——这将通过annotation .py来完成。
train_model.py脚本将在标记的数字上训练LeNet,而test_model.py将把LeNet应用于验证码图像本身。
21.1.3 自动下载示例图片
构建验证码破坏程序的第一步是下载验证码图像的示例。如果我们右击上图21.1中“安全图像”文本旁边的验证码图像,我们将获得以下URL:
如果你复制并粘贴这个URL到你的浏览器中,点击多次刷新,你会注意到这是一个动态程序,每次刷新都会生成一个新的验证码。因此,为了获得示例验证码图像,我们需要请求该图像几百次并保存结果图像。
要自动获取新的验证码图像并将它们保存到磁盘,我们可以使用download_images.py
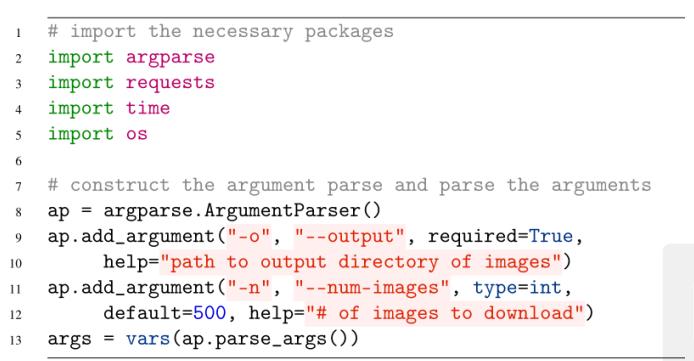
第2-5行导入所需的Python包。请求库使得处理HTTP连接变得很容易,并且在Python生态系统中被大量使用。如果你的系统上还没有安装请求,你可以通过以下方式安装:
第二个可选的开关numimages,控制我们要下载的验证码图片的数量。默认值为500张图片。由于每个验证码中有4位数字,这个值500将给我们500 × 4 = 2000个数字,我们可以用来训练我们的网络。
我们的下一个代码块初始化我们要下载的验证码图像的URL,以及到目前为止生成的图像的总数:
# 循环下载图片
for i in range(0,args["num_images"]):
try:
# 尝试下载一个图片
r = requests.get(url, timeout=60)
# 保存图片到本地目录中
p = os.path.sep.join(args["output"],".jpg".format(str(total).zfill(5)))
f = open(p, "wb")
f.write(r.content)
f.close()
# 更新计数器
print("[INFO] download:".format(p))
total += 1
except:
print("[INFO] error in downloading image...")
# 插入一个sleep线程为了更好的服务
time.sleep(0.1)
在第22行,我们开始对我们想要下载的——num-images进行循环。在第25行上发出下载映像的请求。然后将映像保存到第28-32行上的磁盘。如果下载图像时出现错误,第39行和第40行上的try/except块将捕捉到它,并允许脚本继续。最后,我们在第43行插入一个小睡眠,以礼貌地对待我们所请求的web服务器。
然而,这些只是原始的验证码图像——我们需要提取并标记验证码中的每个数字来创建我们的训练集。为了实现这一点,我们将使用一些OpenCV和图像处理技术来简化我们的工作。
21.1.4 注释并创建我们自己的数据集
那么,如何对每个验证码图像进行标记和注释呢?我们是否打开Photoshop或GIMP,使用“选择/选框”工具复制出一个给定的数字,保存到磁盘,然后重复重复?如果我们这样做,我们可能会花几天的时间不停地工作,以标记原始验证码图像中的每一个数字。
相反,更好的方法是在OpenCV库中使用基本的图像处理技术来帮助我们。打开一个新文件,命名为annotation .py,然后插入以下代码,看看如何更有效地给数据集贴标签:
实际的注释过程如下:
# loop over the image paths
22 for (i, imagePath) in enumerate(imagePaths):
23 # display an update to the user
24 print("[INFO] processing image /".format(i + 1,
25 len(imagePaths)))
26
27 try:
28 # load the image and convert it to grayscale, then pad the
29 # image to ensure digits caught on the border of the image
30 # are retained
31 image = cv2.imread(imagePath)
32 gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
33 gray = cv2.copyMakeBorder(gray, 8, 8, 8, 8,
34 cv2.BORDER_REPLICATE)
在第22行,我们开始对每个单独的imagepath进行循环。对于每个图像,我们从磁盘加载它(第31行),将其转换为灰度(第32行),并在每个方向上用8个像素填充图像的边框(第33和34行)。下图21.2显示了原始图像(左)和填充图像(右)之间的差异。
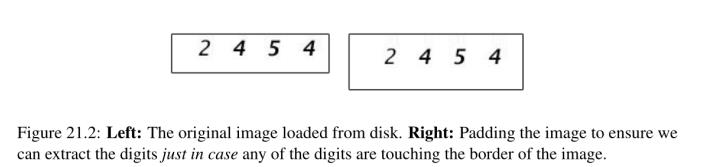
我们执行这个填充只是为了防止任何我们的数字接触到图像的边界。如果这些数字接触到边界,我们就无法从图像中提取出它们。因此,为了防止这种情况,我们有意地填充输入图像,使给定的数字不可能接触到边界。
我们现在准备通过Otsu的阈值方法对输入图像进行二值化(第九章,实用Python和OpenCV):

这个函数调用自动对我们的图像设定阈值,这样我们的图像就变成了二值图像——黑色像素代表背景,而白色像素代表前景,如图21.3所示。
对图像进行阈值化是我们图像处理管道中的关键步骤,因为我们现在需要找到每个数字的轮廓:
# find contours in the image, keeping only the four largest
41 # ones
42 cnts = cv2.findContours(thresh.copy(), cv2.RETR_EXTERNAL,
43 cv2.CHAIN_APPROX_SIMPLE)
44 cnts = cnts[0] if imutils.is_cv2() else cnts[1]
45 cnts = sorted(cnts, key=cv2.contourArea, reverse=True)[:4]
第42和43行找到图像中每个数字的轮廓(即轮廓)。为了防止图像中出现“噪声”,我们根据轮廓的面积对其进行排序,只保留四个最大的轮廓(即我们的数字本身)。
考虑到我们的轮廓,我们可以通过计算边界框来提取它们:
# 对于四个轮廓,通过计算边界框来得到数字值
for c in cnts:
# 计算数字的边界框,然后提取数字
(x, y, w, h) = cv2.boundingRect(c)
roi = gray[y - 5:y + h + 5, x - 5 : x + w + 5]
# 显示字符,使其足够大,以便我们看到,然后等待按键
cv2.imshow("ROI", imutils.resize(roi, width=28))
key = cv2.waitKey()
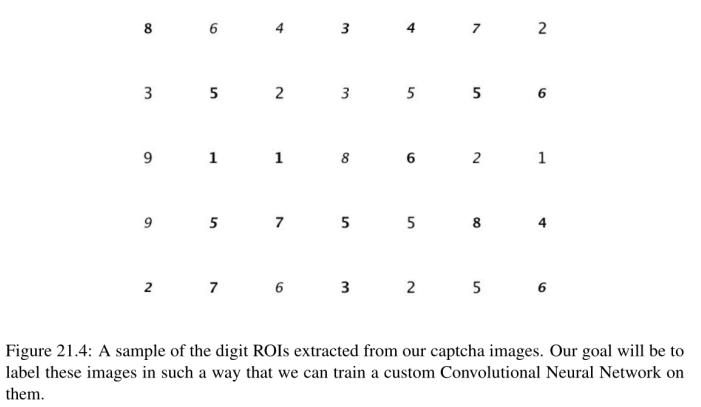
在第48行,我们对阈值图像中的每个轮廓进行循环。我们称之为cv2。boundingRect用于计算数字区域的边界框(x, y)坐标。然后从第52行上的灰度图像中提取感兴趣区域(ROI)。我在图21.4中包含了从原始验证码图像中提取的数字样本作为蒙太奇。
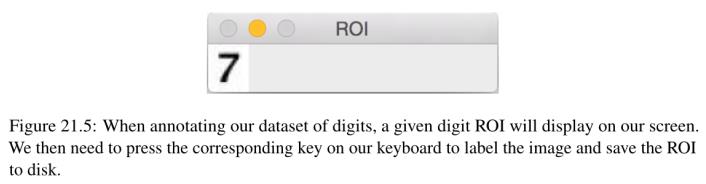
第56行将数字ROI显示在屏幕上,调整其大小,使其足够大,便于我们查看。然后第57行等待键盘上的键按—但是要明智地选择键按!您按下的键将用作数字的标签。
通过cv2了解标签过程是如何工作的。waitKey调用,看看下面的代码块:
# 如果'键被按下,那么忽略当前的数字
if key == ord("'"):
print("[INFO] ignoring character")
continue
# 获取按下的键并构造路,得到输出目录
key = chr(key).upper()
dirPath = os.path.sep.join([args["annot"], key])
# 如果输出目录不存在,请创建该目录
if not os.path.exists(dirPath):
os.makedirs(dirPath)
如果按下了波浪键'(波浪键),我们将忽略字符(第60和62行)。如果我们的脚本意外地检测到输入图像中的“噪音”(即,除了数字以外的任何东西),或者如果我们不确定数字是什么,就可能需要忽略一个字符。否则,我们假定按下的键是数字的标签(第66行),并使用该键构造输出标签的目录路径(第67行)。
因此,所有包含数字“7”的图像将存储在dataset/7子目录中。第70和71行检查dirPath目录是否存在——如果不存在,我们就创建它。
一旦确保dirPath正确存在,我们只需将示例数字写入文件:

第74行获取到目前为止为当前数字写入磁盘的示例总数。然后,我们使用dirPath构造示例数字的输出路径。在执行第75和76行之后,我们的输出路径p看起来像:
再次注意,所有包含数字7的roi示例都将存储在数据集/7子目录中——这是一种简单、方便的方式来组织你的数据集,当标记图像时。
如果我们想按ctrl+c退出脚本,或者如果处理图像出错,我们的最终代码块句柄:
except KeyboardInterrupt:
print("[INFO] manually leaving script")
break
# 此特定图像出现未知错误
except:
print("[INFO] skipping image for some particular reasons...")
如果我们希望按ctrl+c并尽早退出脚本,第85行检测到这一点,并允许我们的Python程序优雅地退出。第90行捕获所有其他错误并简单地忽略它们,允许我们继续标记过程。
在标记数据集时,您最不希望看到的是由于图像编码问题而出现的随机错误,从而导致整个程序崩溃。如果发生这种情况,您将不得不重新开始标记过程。显然,您可以构建额外的逻辑来检测您在哪里中断了,但是这样的示例超出了本书的范围。
要给从E-ZPass NY网站下载的图片贴上标签,只需执行以下命令:
python annotate.py --input downloads --annot dataset
作者已经将上述的2000个数字标注好了,具体数据集在书中的链接中。
21.1.5 预处理数字
正如我们所知,我们的卷积神经网络在训练时需要一个固定宽度和高度的图像来传递。然而,我们标记的
以上是关于)的主要内容,如果未能解决你的问题,请参考以下文章