视觉SLAM十四讲笔记 -- 第一讲
Posted 炼丹狮
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了视觉SLAM十四讲笔记 -- 第一讲相关的知识,希望对你有一定的参考价值。
第一讲:课后习题
- 有线性方程 Ax = b,若已知 A,b,需要求解x,该如何求解? 这对 A 和 b 有哪些要求? 【提示:从A的维度和秩角度来分析】
答:可以利用大学时候学的非齐次方程组的方法求解,利用 A 的增广矩阵 ,对增广矩阵进行标准化和归一化。
A的增广矩阵是:
rank(A)<rank(A~) , 方程组 (2) 无解
rank(A)=rank(A~)=n , 方程组 (2) 有唯一解
rank(A)=rank(A~)<n , 方程组 (2) 有无穷解
rank(A)>rank(A~) 不可能出现, 因为增广矩阵的秩大于等于系数矩阵的秩(矩阵加入一列,其秩只能增大,不可能变小)

- 高斯分布是什么? 它的一维形式是什么样子? 它的高维形式是什么样子?
答:高斯分布(Gaussian distribution),也称正态分布(Normal distribution),最早由棣莫弗(Abraham de Moivre)在求二项分布的渐近公式中得到。C.F.高斯在研究测量误差时从另一个角度导出了它。P.S.拉普拉斯和高斯研究了它的性质。是一个在数学、物理及工程等领域都非常重要的概率分布,在统计学的许多方面有着重大的影响力。
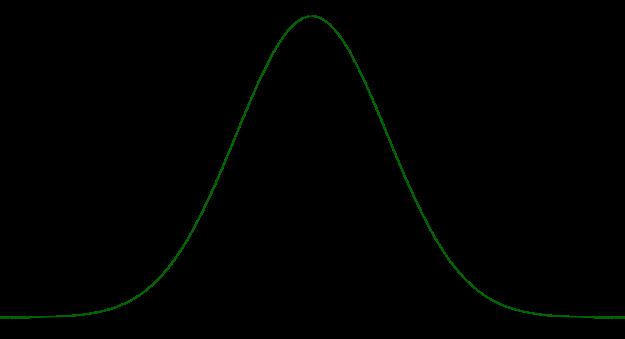
正态曲线呈钟型,两头低,中间高,左右对称因其曲线呈钟形,因此人们又经常称之为钟形曲线。
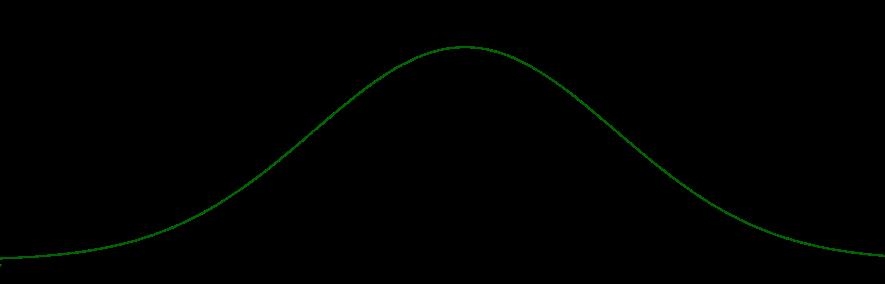
若随机变量X服从一个数学期望为μ、方差为σ2的正态分布,记为N(μ,σ2)。其概率密度函数为正态分布的期望值μ决定了其位置,其标准差σ决定了分布的幅度。当μ = 0,σ = 1时的正态分布是标准正态分布。
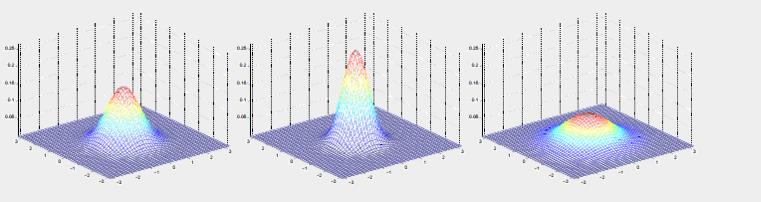
在数据建模时,经常会用到多元高斯分布模型,下面就这个模型的公式并结合它的几何意义,来做一个直观上的讲解。
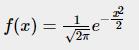
(1)标准高斯函数
高斯函数标准型:
这个函数描述了变量 x 的一种分布特性,变量x的分布有如下特点:
Ⅰ, 均值 = 0
Ⅱ, 方差为1
Ⅲ, 概率密度和为1
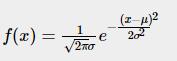
(2)一元高斯函数一般形式
一元高斯函数一般形式:
高维形式如下:
- 你知道C++中的类吗? 你知道STL吗? 你使用过它们吗?
答:总共三个问题:
(1)你知道C++中的类吗?
C++ 是面向对象的语言,其中的类就是一种用户自己定义的数据类型、处理某个问题的单元。在一个类中,用户可以自己定义数据结构,可以自定义处理这些数据的业务逻辑。在面向对象的设计中,一般都是对外隐藏变量,通过接口来对外暴露处理逻辑或者变量的值,这样方便控制数据的权限。更多解释请参见:C++类的介绍
(2)你知道STL吗?
C++标准库由三组库构成:C库,C++库和标准模板库(STL),STL包含了诸多在计算机科学领域里常用的基本数据结构和基本算法。详解请参见:STL学习小结
(3)你使用过它们吗?
使用过
- 你以前怎样书写C++程序?(你完全可以说只在Visual C++6.0下写过CH+工程只要你有写C++和C语言的经验就行。)
答:写过,使用的开发工具是VS2019。写过一些封装硬件的c++接口,使用python调用这些接口。
- 你知道C++11标准吗? 你听说过或用过其中哪些新特性? 有没有其他的标准
答:C++11 标准由国际标准化组织(ISO)和国际电工委员会(IEC)旗下的C++标准委员会(ISO/IEC JTC1/SC22/WG21)于2011年8月12日公布[2] ,并于2011年9月出版。2012年2月28日的国际标准草案(N3376)是最接近于C++11标准的草案(仅编辑上的修正)。此次标准为C++98发布后13年来第一次重大修正。
1.对C++核心语言的扩充
2.核心语言运行期的强化(右值引用和 move 语义;泛化的常数表达式;对POD定义的修正)
3.核心语言建构期表现的加强(外部模板)
4.核心语言使用性的加强(初始化列表;统一的初始化;类型推导[auto关键字];以范围为基础的 for 循环;Lambda函数与表示法;另一种的函数语法;对象构建的改良;显式虚函数重载;空指针;强类型枚举;角括号;显式类型转换;模板的别名;无限制的unions)
5.核心语言能力的提升(变长参数模板;新的字符串字面值;用户自定义的字面值;多任务存储器模型;thread-local的存储期限;使用或禁用对象的默认函数;long long int 类型;静态assertion;允许sizeof运算符作用在类型的数据成员上,无需明确的对象;)
6.C++标准程序库的变更(标准库组件的升级;线程支持;多元组类型;散列表;正则表达式;通用智能指针;可扩展的随机数功能;包装引用;多态函数对象包装器;用于元编程的类型属性;用于计算函数对象返回类型的统一方法)
详细可参见:C++11新标准
- 你知道Linux吗?你有没有至少使用过一种(不算安卓)操作系统,比如 Ubuntu?
答:使用过RedHat,Ubuntu,CentOS这三种操作系统,用于程序服务器的部署,相关命令都相差不大
- Linux的目录结构是什么样的? 你知道哪些基本命令,比如 Is,cat等?
答:Linux 是树形的目录结构,基本命令太多了,例如ls,ll,cd,mkdir,mv,du,df,ps等等
- 如何在 Ubuntu系统中安装软件(不打开软件中心的情况下)? 这些软件被安装在什么地方? 如果只知道模糊的软件名称(比如想要装一个名称中含有Eigen 的库),应该如何安装它?
答:(1)应该有三种方法来安装软件
第一种:使用apt-get install来安装应用程序
比如我要安装 nginx 这个软件,使用以下,他会帮我把所有的依赖包都一起安装了。例如: >sudo apt-get install nginx
常用命令:
- apt-get install xxx 安装xxx 。如果带有参数,那么-d 表示仅下载 ,-f 表示强制安装
- apt-get remove xxx 卸载xxx
- apt-get update 更新软件信息数据库
- apt-get upgrade 进行系统升级
- apt-cache search 搜索软件包
第二种:dpkg安装deb包
安装方法如下:
sudo dpkg -i package.deb
常用命令如下:
- dpkg -i package.deb 安装包
- dpkg -r package 删除包
- dpkg -P package 删除包(包括配置文件)
- dpkg -L package 列出与该包关联的文件
- dpkg -l package 显示该包的版本
- dpkg –unpack package.deb 解开 deb 包的内容
- dpkg -S keyword 搜索所属的包内容
- dpkg -l 列出当前已安装的包
- dpkg -c package.deb 列出 deb 包的内容
- dpkg –configure package 配置包
第三种:make install源代码安装
如果要使用make安装的话,那么必须得安装build-essential这个依赖包,安装方法已经在前面说过了。在安装完毕以后,我们就可以进行源码安装。源码安装大致可以分为三步骤:(./configure)–> 编译(sudo make) –> 安装(sudo make install)。
配置:这是编译源代码的第一步,通过 ./configure 命令完成。执行此步以便为编译源代码作准备。常用的选项有 --prefix=PREFIX,用以指定程序的安装位置。更多的选项可通过 --help 查询。也有某些程序无需执行此步。
编译:一旦配置通过,可即刻使用 make 指令来执行源代码的编译过程。视软件的具体情况而定,编译所需的时间也各有差异,我们所要做的就是耐心等候和静观其变。此步虽然仅下简单的指令,但有时候所遇到的问题却十分复杂。较常碰到的情形是程序编译到中途却无法圆满结束。此时,需要根据出错提示分析以便找到应对之策。
安装:如果编译没有问题,那么执行 sudo make install 就可以将程序安装到系统中了。
(2)模糊安装软件
如果只知道软件的模糊名称,可以
yum list | grep eigen
进行安装。
- 花一个小时学习Vim,因为你迟早会用它。你可以在终端中输入vimtutor阅读一遍所有内容。我们不需要你非常熟练地操作它,只要能够在学习本书的过程中使用它输入代码即可。不要在它的插件上浪费时间,不要想着把Vim用成 IDE,我们只用它做文本编辑的工作。
答:比较熟悉Vim,平时对服务器端的运维操作都是通过这个来做的,基本命令比较熟悉。
参考文献:
[1].线性方程组的解
[2].多元高斯分布(The Multivariate normal distribution) - bingjianing - 博客园
[3].STL学习小结
[4].C++类的介绍
码字不易,欢迎点赞,评论,收藏 ,o( ̄︶ ̄)o
以上是关于视觉SLAM十四讲笔记 -- 第一讲的主要内容,如果未能解决你的问题,请参考以下文章