lm358寻迹电路:从原理图到焊接的总结
Posted hongjuedong
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了lm358寻迹电路:从原理图到焊接的总结相关的知识,希望对你有一定的参考价值。
1.基本元器件:LM358芯片一个,减速电机两个,三极管两个(PNP),光敏二极管两个,发光二极管两个,色环电阻(10K,3k,各两个,100欧四个),蓝帽10k可调电阻两个,
2,介绍重要元件的基本功能:
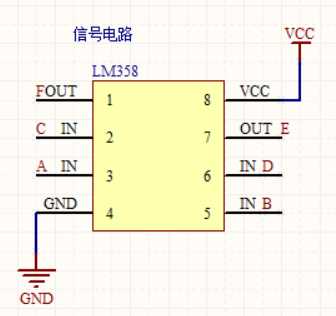
1 LM358
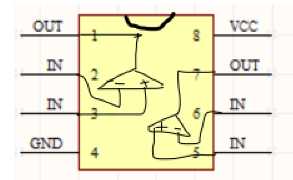
如图为lm358的引脚图,从图中可以看出,一个芯片有两个输出分别是1,7,脚。会输出高或低的电平信号,这个信号由2,3,5,6,脚决定,如图所示。
当v3-v2>0,时,1脚发出高电平信号,v3-v2<0时,则发出低电平信号。同样的道理,5,6脚也是这样控制7脚的。
2 三极管
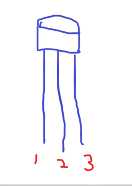
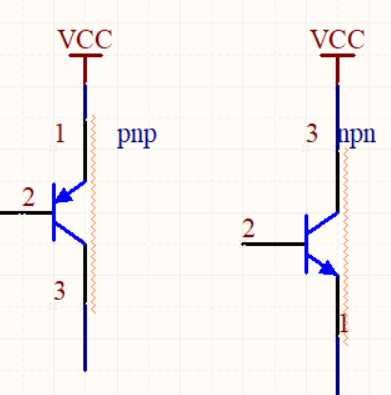
下面笔者只介绍PNP和NPN型的三极管。三极管是哼常见的我元件,功能强大而且实用,运用范围非常之广。首先我们要回辨别引脚,如图是其实物图的引脚和原理图的引脚示意图,其1,2,3,是一一对应的。不要犯迷糊了,实物图的引脚1是发射极,2是基极,3是集电极,原理图中pnp和npn有箭头的那端是发射极,焊接是要注意了,而且不管是PNP还是NPN,其实物图的引脚已经固定,注意npn和pnp的正负极接法是不同的。三极管导通实现电流放大,PNP型的基极接低电平(粗劣的表示为v1-v2>0)时导通,带动电机转动,NPN基极接高电平时导通(v3=v2);
3 色环电阻广泛用于电路中,其读法依据其环数和颜色来判别,读者可自行查阅相关资料,光敏二极管对光敏感,其阻值随着光照强度的变化而变化,呈反比关系。
电路原理图的设计和分析 ,以下电路图分成模块方便说明,部分线的连接用网络标号(可以理解为隔空接触)表示。
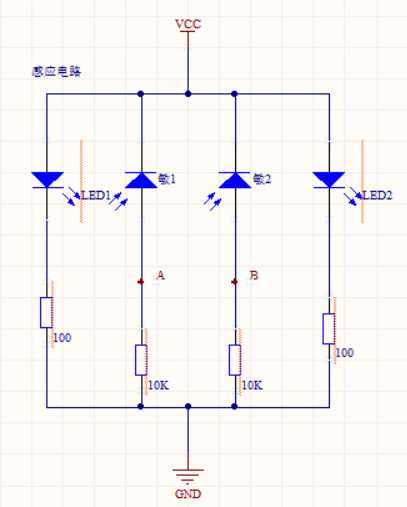

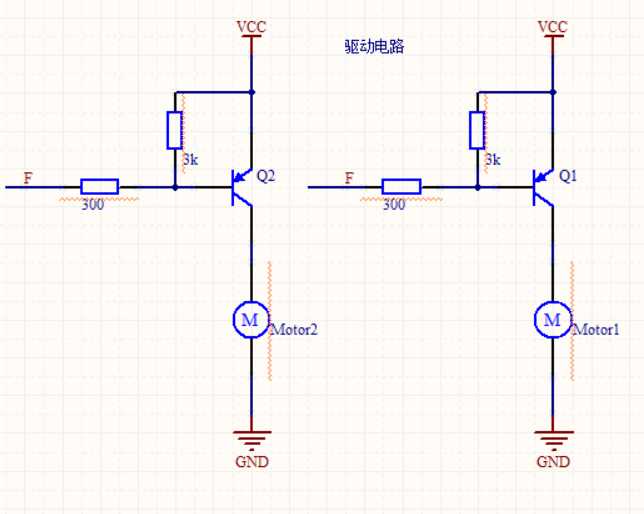 以上就是我们所要焊接的电路,读者仔细看看其网络标号。简单的说就是通过芯片蓝控制两个电机的转与不转。下面有以个小归纳
以上就是我们所要焊接的电路,读者仔细看看其网络标号。简单的说就是通过芯片蓝控制两个电机的转与不转。下面有以个小归纳
- VA-VC>0 ,VF高电平,电机2停。
- VA-VC<0 ,VF低电平,电机2转。
- VB-VD>0,VE高电平,电机1停。
- VB-VD<0,VE低电平,电机1转。
可以看出规律了吗?在实物中我们是把车放在地上要两个电机都是停止的,在二级管在黑布上面时光照强度有所减弱相应电机才转。待会有详细解说。
下面先简单说说焊接的注意事项。
焊接经验笔者总结了几个需要注意的,
1.正确使用电络铁,其针头切记不可接触焊盘,不然焊盘受热脱落,那这一区域都沾不上焊锡了。
2 要做到即焊即放,不要乱发或乱拿,用完拔电,以防烫伤和烧毁其他东西,严重会引起火灾。
3,严格按照正确电路图完成焊接,。做到细心,如果焊错很麻烦。
下面具体说明实际循迹效果:
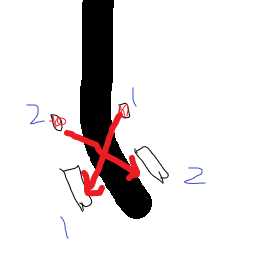 如图为简单示意图,循迹效果其实就是两个电机不断的在左右转之间变化,如图如果车继续前进则光敏1到了黑线上方,信号反馈给电机1则电机1转,此时电机2不转,所以车子整体往右拐,之后光敏2在黑线上方,则低电平信号反馈给电机2使其转,而电机1当光敏1不在黑线上方时就停止转动了。就是以这种方式不停的左右转实现了小车沿着黑线行驶的效果。在实际中,这是一个交叉反馈,焊接及连线时注意。好了,纸上得来终觉浅,有兴趣的读者可以尝试做以个,
如图为简单示意图,循迹效果其实就是两个电机不断的在左右转之间变化,如图如果车继续前进则光敏1到了黑线上方,信号反馈给电机1则电机1转,此时电机2不转,所以车子整体往右拐,之后光敏2在黑线上方,则低电平信号反馈给电机2使其转,而电机1当光敏1不在黑线上方时就停止转动了。就是以这种方式不停的左右转实现了小车沿着黑线行驶的效果。在实际中,这是一个交叉反馈,焊接及连线时注意。好了,纸上得来终觉浅,有兴趣的读者可以尝试做以个,
以上内容若有哪里不正确,还请指正,以免误导好学的读者。谢谢!
以上是关于lm358寻迹电路:从原理图到焊接的总结的主要内容,如果未能解决你的问题,请参考以下文章
Linux嵌入式_详解从原理图到数据手册解析PWM蜂鸣器实现