双边滤波算法原理及实现
Posted magic-428
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了双边滤波算法原理及实现相关的知识,希望对你有一定的参考价值。
双边滤波算法原理
双边滤波是一种非线性滤波器,它可以达到保持边缘、降噪平滑的效果。和其他滤波原理一样,双边滤波也是采用加权平均的方法,用周边像素亮度值的加权平均代表某个像素的强度,所用的加权平均基于高斯分布[1]。最重要的是,双边滤波的权重不仅考虑了像素的欧氏距离(如普通的高斯低通滤波,只考虑了位置对中心像素的影响),还考虑了像素范围域中的辐射差异(例如卷积核中像素与中心像素之间相似程度、颜色强度,深度距离等),在计算中心像素的时候同时考虑这两个权重。
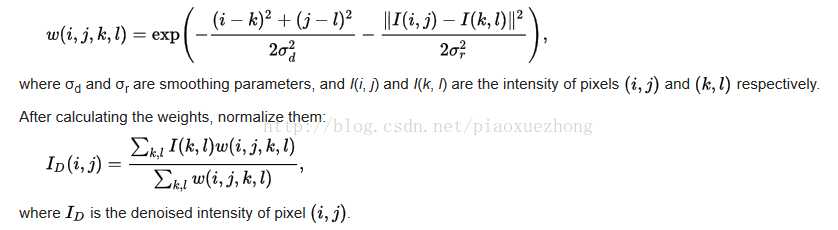
双边滤波的核函数是空间域核与像素范围域核的综合结果:在图像的平坦区域,像素值变化很小,对应的像素范围域权重接近于1,此时空间域权重起主要作用,相当于进行高斯模糊;在图像的边缘区域,像素值变化很大,像素范围域权重变大,从而保持了边缘的信息。
双边滤波器代码实现
void cv::bilateralFilter( InputArray _src, OutputArray _dst, int d,
double sigmaColor, double sigmaSpace,
int borderType )
{
Mat src = _src.getMat();
_dst.create( src.size(), src.type() );
Mat dst = _dst.getMat();
if( src.depth() == CV_8U )
bilateralFilter_8u( src, dst, d, sigmaColor, sigmaSpace, borderType );
else if( src.depth() == CV_32F )
bilateralFilter_32f( src, dst, d, sigmaColor, sigmaSpace, borderType );
else
CV_Error( CV_StsUnsupportedFormat,
"Bilateral filtering is only implemented for 8u and 32f images" );
}
static void
bilateralFilter_8u( const Mat& src, Mat& dst, int d,
double sigma_color, double sigma_space,
int borderType )
{
int cn = src.channels();
int i, j, k, maxk, radius;
Size size = src.size();
CV_Assert( (src.type() == CV_8UC1 || src.type() == CV_8UC3) &&
src.type() == dst.type() && src.size() == dst.size() &&
src.data != dst.data );
if( sigma_color <= 0 )
sigma_color = 1;
if( sigma_space <= 0 )
sigma_space = 1;
// 计算颜色域和空间域的权重的高斯核系数, 均值 μ = 0; exp(-1/(2*sigma^2))
double gauss_color_coeff = -0.5/(sigma_color*sigma_color);
double gauss_space_coeff = -0.5/(sigma_space*sigma_space);
// radius 为空间域的大小: 其值是 windosw_size 的一半
if( d <= 0 )
radius = cvRound(sigma_space*1.5);
else
radius = d/2;
radius = MAX(radius, 1);
d = radius*2 + 1;
Mat temp;
copyMakeBorder( src, temp, radius, radius, radius, radius, borderType );
vector<float> _color_weight(cn*256);
vector<float> _space_weight(d*d);
vector<int> _space_ofs(d*d);
float* color_weight = &_color_weight[0];
float* space_weight = &_space_weight[0];
int* space_ofs = &_space_ofs[0];
// 初始化颜色相关的滤波器系数: exp(-1*x^2/(2*sigma^2))
for( i = 0; i < 256*cn; i++ )
color_weight[i] = (float)std::exp(i*i*gauss_color_coeff);
// 初始化空间相关的滤波器系数和 offset:
for( i = -radius, maxk = 0; i <= radius; i++ )
{
j = -radius;
for( ;j <= radius; j++ )
{
double r = std::sqrt((double)i*i + (double)j*j);
if( r > radius )
continue;
space_weight[maxk] = (float)std::exp(r*r*gauss_space_coeff);
space_ofs[maxk++] = (int)(i*temp.step + j*cn);
}
}
// 开始计算滤波后的像素值
for( i = 0; i < 0, size.height; i++ )
{
const uchar* sptr = temp->ptr(i+radius) + radius*cn; // 目标像素点
uchar* dptr = dest->ptr(i);
if( cn == 1 )
{
// 按行开始遍历
for( j = 0; j < size.width; j++ )
{
float sum = 0, wsum = 0;
int val0 = sptr[j];
// 遍历当前中心点所在的空间邻域
for( k = 0; k < maxk; k++ )
{
int val = sptr[j + space_ofs[k]];
float w = space_weight[k]*color_weight[std::abs(val - val0)];
sum += val*w;
wsum += w;
}
// 这里不可能溢出, 因此不必使用 CV_CAST_8U.
dptr[j] = (uchar)cvRound(sum/wsum);
}
}
else
{
assert( cn == 3 );
for( j = 0; j < size.width*3; j += 3 )
{
float sum_b = 0, sum_g = 0, sum_r = 0, wsum = 0;
int b0 = sptr[j], g0 = sptr[j+1], r0 = sptr[j+2];
k = 0;
for( ; k < maxk; k++ )
{
const uchar* sptr_k = sptr + j + space_ofs[k];
int b = sptr_k[0], g = sptr_k[1], r = sptr_k[2];
float w = space_weight[k]*color_weight[std::abs(b - b0) +
std::abs(g - g0) + std::abs(r - r0)];
sum_b += b*w; sum_g += g*w; sum_r += r*w;
wsum += w;
}
wsum = 1.f/wsum;
b0 = cvRound(sum_b*wsum);
g0 = cvRound(sum_g*wsum);
r0 = cvRound(sum_r*wsum);
dptr[j] = (uchar)b0;
dptr[j+1] = (uchar)g0;
dptr[j+2] = (uchar)r0;
}
}
}
}参考
[1]: Bilateral Filters(双边滤波算法)原理及实现
[2]: 双边滤波算法介绍与实现
以上是关于双边滤波算法原理及实现的主要内容,如果未能解决你的问题,请参考以下文章