车联网 - 电子围栏技术
Posted xtuz
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了车联网 - 电子围栏技术相关的知识,希望对你有一定的参考价值。
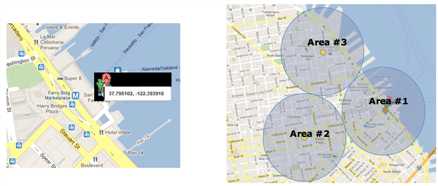
什么是汽车电子围栏
通常来说,电子围栏是管理者事先划定好一块规则或不规则的区域,也可以按照行政区域进行划分,例如北京市、广东省等。
其目的是为了便于管理:车辆驶离指定的区域,系统会按事先设定的条件,启动相关的处理程序,及时向车队管理者发出警报及手机端会推送通知。
工作流程
- 车载设备需要安装GPS设备,并能实时定位当前位置主动上报。
- 管理者在TSP系统中设定车辆行驶在哪一个指定区域里,并制定出当车辆驶出指定区域后的解决方案。
- 车辆通过4G/5G通讯网络传输当前车辆位置信息TSP系统,系统存储车辆w位置数据和并进行实时分析,记录和备份车辆的行驶路径。
- 如果车辆驶出设定的指定区域,TSP系统则推送警报给管理者以告知。
电子围栏算法
1. 射线法
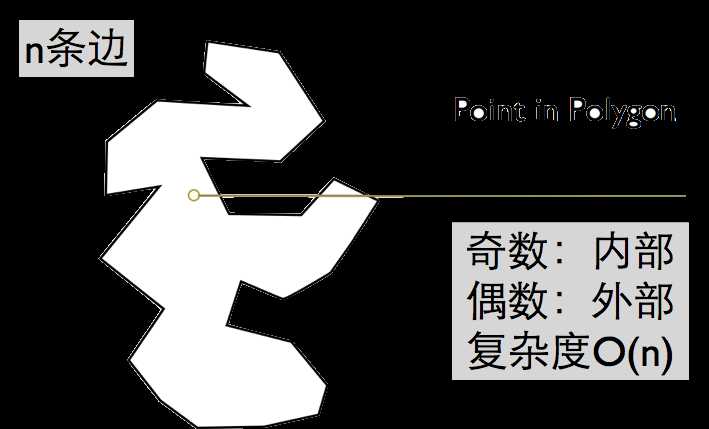
地理围栏一般是多边形,如何判断点在多边形内部呢?可以通过射线法来判断点是否在多边形内部。如下图所示,从该点出发沿着X轴画一条射线,依次判断该射线与每条边的交点,并统计交点个数,如果交点数为奇数,则在多边形内部(如图3个交点),如果焦点数是偶数,则在外部,射线法对凸和非凸多边形都适用,复杂度为O(N)。
2. 夹角和法

如图 1.4,在多边形内或外有一点,将这一点与多边形的各个角相连,构成夹角,为 <1、 <2 、<3、<4 、<5 和 <6 ,把这些夹角相加便得到夹角和,为方便起见,记此夹角和为 a。规定正向为顺时针旋转方向,负向为逆时针方向[4]。当 a!=2π 时,则被判断点在多边形 的外部;当 a=2π 时,则被判断点在多边形的内部。
夹角和法只可以用于凸多边形,然而围栏形状是多变的,可能是凸多边形也可能 是凹多边形。从解决问题的广度上来说,射线法是最适合的方法。
代码示例
import json
import math
lnglatlist = []
data = '[{"points":[{"lng":0,"lat":0},{"lng":2,"lat":0},{"lng":0,"lat":2}]}]'
data = json.loads(data)
if 'points' in data[0]:
for point in data[0]['points']:
lnglat = []
lnglat.append(float(str(point['lng'])))
lnglat.append(float(str(point['lat'])))
lnglatlist.append(lnglat)
def windingNumber(point, poly):
poly.append(poly[0])
px = point[0]
py = point[1]
sum = 0
length = len(poly)-1
for index in range(0,length):
sx = poly[index][0]
sy = poly[index][1]
tx = poly[index+1][0]
ty = poly[index+1][1]
#点与多边形顶点重合或在多边形的边上
if((sx - px) * (px - tx) >= 0 and (sy - py) * (py - ty) >= 0 and (px - sx) * (ty - sy) == (py - sy) * (tx - sx)):
return "on"
#点与相邻顶点连线的夹角
angle = math.atan2(sy - py, sx - px) - math.atan2(ty - py, tx - px)
#确保夹角不超出取值范围(-π 到 π)
if(angle >= math.pi):
angle = angle - math.pi * 2
elif(angle <= -math.pi):
angle = angle + math.pi * 2
#计算回转数并判断点和多边形的几何关系
result = 'out' if int(sum / math.pi) == 0 else 'in'
return result
point = [1, 1]
print(windingNumber(point,lnglatlist))
更多内容参考 >> 电子围栏技术详解
以上是关于车联网 - 电子围栏技术的主要内容,如果未能解决你的问题,请参考以下文章