手机摄像头组成结构和工作原理简介
Posted libai123456
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了手机摄像头组成结构和工作原理简介相关的知识,希望对你有一定的参考价值。
手机摄像头由:PCB板、镜头、固定器和滤色片、DSP(CCD用)、传感器等部件组成。
工作原理:拍摄景物通过镜头,将生成的光学图像投射到传感器上,然后光学图像被转换成电信号,电信号再经过模数转换变为数字信号,数字信号经过DSP加工处理,再被送到手机处理器中进行处理,最终转换成手机屏幕上能够看到的图像。
1 PCB板
摄像头中用到的印刷电路板,分为硬板、软板、软硬结合板三种
2 镜头
镜头是将拍摄景物在传感器上成像的器件,它通常由由几片透镜组成。从材质上看,摄像头的镜头可分为塑胶透镜和玻璃透镜。
镜头有两个较为重要的参数:光圈和焦距。
1)光圈是安装在镜头上控制通过镜头到达传感器的光线多少的装置,除了控制通光量,光圈还具有控制景深的功能,光圈越大,景深越小,平时在拍人像时背景朦胧效果就是小景深的一种体现。
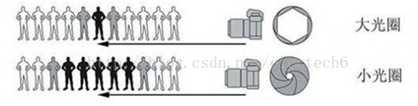
(数值越小,光圈越大,进光量越多,画面比较亮,焦平面越窄,主体背景虚化越大;
值越大,光圈越小,进光量越少,画面比较暗,焦平面越宽,主体前后越清晰。)
2)焦距是从镜头的中心点到传感器平面上所形成的清晰影像之间的距离。
3 固定器和滤色片
固定器的作用,实际上就是来固定镜头,另外固定器上还会有一块滤色片。
滤色片分两种方式,一种是RGB原色分色法,另一种是CMYK补色分色法。
滤色片的作用是把色彩滤掉,保证每个二极管感受到的光是单色的。
为什么要滤成单色光?因为感光二极管只能输出不同的电平,也就是只能表示光的强度而已,没办法表示颜色信息(黄色光和红色光,只要对应的亮度相同,二极管都会输出一样的电平信息)。
4 DSP
又叫数字信号处理芯片:它的功能是通过一系列复杂的数学算法运算,对数字图像信号进行优化处理,最后把处理后的信号传到显示器上。
DSP结构框架:(1). ISP(镜像信号处理器);(2). JPEG encoder(JPEG图像解码器)。
DSP控制芯片的作用是:将感光芯片获取的数据及时快速地传到baseband中并刷新感光芯片,因此控制芯片的好坏,直接决定画面品质(比如色彩饱和度、清晰度)与流畅度。
(*)ISP芯片是“大脑”
( ISP芯片分为集成和独立两种,独立ISP芯片处理能力优于集成ISP芯片,但成本更高。)
ISP芯片的作用就是对传感器输入的信号进行运算处理,最终得出经过线性纠正、噪点去除、坏点修补、颜色插值、白平衡校正、曝光校正等处理后的结果。ISP芯片能够在很大程度上决定手机相机最终的成像质量,通常它对图像质量的改善空间可达10%-15%。
ISP内的软件算法很重要:ISP芯片对传感器输入的电流信号进行处理后,首先会生成未经加工的原始图像,而软件算法就好比对原始图像在内部进行了一番“PS”,优化图像的色彩、色调、对比度、噪点等,最后生成我们所看到的jpg格式图片。
5 传感器
传感器是摄像头组成的核心,也是最关键的技术。(它是一种用来接收通过镜头的光线,并且将这些光信号转换成为电信号的装置。光电二极管)感光器件面积越大,捕获的光子越多,感光性能越好,信噪比越低。主要有两种,CCD(电荷耦合元件),CMOS(互补型金属氧化物半导体)。
在CMOS传感器的摄像头中,其DSP芯片已经集成到CMOS中,从外观上来看,它们就是一个整体。而采用CCD传感器的摄像头则分为CCD和DSP两个独立部分。
图像传感器的发展趋势是高敏感化、高分辨率、省电、低压工作等高性能方向发展。
6 闪光灯
闪光灯是增加相机曝光量的方式之一,在暗光环境下会打亮周围景物,从而弥补光线不足,提升画面亮度。另外,在光线复杂的环境下,利用闪光灯可以去除杂光,使照片的色彩还原更为真实。
7 影像质量
影像质量是指成像的性能,测试影像质量需要测试多个方面,如曝光、清晰度、颜色、质感、噪音、防手抖、闪光灯、对焦、伪像等等。
手机成像效果比不了摄像机的根本原因:感光元件的大小。
像素不是决定图片质量的关键因素,那么谁才是呢?答案是传感器。
相对来说,传感器尺寸越大,感光性能越好,捕捉的光子(图形信号)越多,信噪比越低,成像效果自然也越出色,然而更大的传感器却会导致手机的体积、重量、成本增加。
8 手机双摄像头
其实双摄像头的理论基础就是把原本要求纵向空间的光学体系,在横向空间的平面上铺展开来。这样即达到了成像水平,也不会使摄像头突出影响手机整体的美观。
双摄像头功能:
1)利用双摄像头产生立体视觉,获得影像的景深,利用景深信息进行背景虚化。
2)利用左右两张不同的图片信息进行融合,以期望得到更高的分辨率,更好的图像质量,或实现光学变焦、夜景拍摄增强。
双摄手机工作原理主要有以下几种:
1) 彩色+彩色摄像头(RGB+RGB),优势在于可以计算景深,从而实现背景虚化和重新对焦(即先拍照后对焦);
2) 彩色+黑白相机(RGB+Mono),优势在于可以提升暗光或夜晚手机成像质量;
提高暗光拍照质量一般有三种办法:延长曝光时间、提高ISO感光度、增大光圈。(延长曝光时间会带来手抖的问题,手机光圈一般都是固定的无法调整)
彩色摄像头有滤光片,只允许RGB光进入,会滤掉一部分光,而黑白摄像头没有滤光片,所有的光都可以进来,获得更大的进光量,因此,黑白相机的图像更加明亮,细节也保留的更好。融合后的结果信噪比明显提升了(信噪比,SNR,有用信息和噪声的比值)
3) 广角+长焦镜头(Wide+Tele),这个组合最大优势在于可以实现光学变焦(目前大多数主流手机厂商采用的双摄原理);
9 焦距和视角
焦距:焦距是摄影镜头的主要性能之一,指从镜头的光学中心到焦平面(胶片或影像传感器CCD或CMOS)之间的距离,用f表示,单位mm。
视角 :视角是指镜头所能看到和记录的影像范围。
镜头焦距长短与视角大小成反比,镜头焦距越长,视角越小。
10 变焦
变焦是镜头的一个重要能力,包括光学变焦(optical zoom)与数码变焦(digital zoom)两种。
两者虽然都有有助于望远拍摄时放大远方物体,但是只有光学变焦可以支持图像主体成像后,增加更多的像素,让主体不但变大,同时也相对更清晰。通常变焦倍数大者越适合用于望远拍摄。
1)光学变焦是通过镜头、物体和焦点三方的位置发生变化而产生的。它是通过改变光学镜片组结构来改变镜头焦距,从而实现变焦。当成像面在水平方向运动的时候,视觉和焦距就会发生变化,更远的景物变得更清晰。
2)数码变焦是通过数码相机内的处理器,把图片内的每个象素面积增大,从而达到放大目的,使用"插值"处理手段做放大,通过数码变焦,拍摄的景物放大了,但它的清晰度会有一定程度的下降。
11 相机或手机拍照质量评测专业机构
DXOMARK:https://www.dxomark.com/cn/
DXOMark测试项目:曝光和对比度、色彩、自动对焦、纹理、噪点、伪像、闪光灯和防抖(视频)等许多测试项目的分数。
1)曝光和对比度:曝光项目旨在测量摄像头如何根据拍摄对象和背景的亮度进行适当的调整和拍摄。(对比度)动态范围是指摄像头拍摄场景最亮部分到最暗部分的细节的能力。
2)色彩项目的分数旨在衡量摄像头在各种光照条件下如何正确地再现色彩。
3)自动对焦项目旨在测量摄像头在不同照明条件下可以用多快的速度来准确地针对拍摄对象进行对焦。
4)纹理项目旨在测量摄像头如何保留微小的细节,例如物体表面上可观察到的细节。由于摄像头厂商引入了降噪技术(例如更长的快门时间和后期处理),而产生了运动模糊以及柔化处理使细节变少的副作用,因此纹理的评分变得尤为重要。
5)噪点项目旨在测量图像中存在多少噪点。噪点可能来自场景本身的光线,也可能是摄像头的图像传感器和电子元件造成的。
6)伪像项目旨在测量摄像头的镜头和数字处理对图像造成的失真程度或其他瑕疵。
噪点主要与摄像头的图像传感器有关,而伪像则是镜头所产生的失真现象,其中包括看起来弯曲的直线或不正常的彩色区域。
7)闪光灯项目旨在测量手机的内置闪光灯(如果有的话)是否能有效而准确地照亮拍摄对象。
12 自动白平衡
人类视觉系统具有颜色恒常性的特点,因此人类对事物的观察可以不受到光源颜色的影响。但是图像传感器本身并不具有这种颜色恒常性的特点,因此,其在不同光线下拍摄到的图像,会受到光源颜色的影响而发生变化。例如在晴朗的天空下拍摄到的图像可能偏蓝,而在烛光下拍摄到的物体颜色会偏红。因此,为了消除光源颜色对于图像传感器成像的影响,自动白平衡功能就是模拟了人类视觉系统的颜色恒常性特点来消除光源颜色对图像的影响的。
13 颜色饱和度
颜色的饱和度是指色彩的纯度,某色彩的纯度越高,则其表现的就越鲜明;纯度越低,表现的则比较黯淡。
14 3A技术
3A技术指的是自动对焦(AF)、自动曝光(AE)及自动白平衡(AWB)。
自动对焦算法通过既得图像对比度移动镜头使图像对比度达到最大.
自动曝光算法将根据可用的光源条件自动设置曝光值.
自动白平衡算法根据光源条件调整图片颜色的保真程度。
15 图像边缘检测
图像边缘信息主要集中在高频段,通常说图像锐化或检测边缘,实质就是高频滤波。我们知道微分运算是求信号的变化率,具有加强高频分量的作用。在空域运算中来说,对图像的锐化就是计算微分。由于数字图像的离散信号,微分运算就变成计算差分或梯度。图像处理中有多种边缘检测(梯度)算子,常用的包括普通一阶差分,Robert算子(交叉差分),Sobel算子等等,是基于寻找梯度强度。拉普拉斯算子(二阶差分)是基于过零点检测。通过计算梯度,设置阈值,得到边缘图像。
一阶微分边缘算子,经典算子比如:Roberts(罗伯特)、Prewitt(普鲁伊特)、Sobel(索贝尔),Canny(坎尼)等,
二阶微分边缘算子,LOG边缘检测算子。
Sobel算子:其主要用于边缘检测,在技术上它是以离散型的差分算子,用来运算图像亮度函数的梯度的近似值,缺点是Sobel算子并没有将图像的主题与背景严格地区分开来,换言之就是Sobel算子并没有基于图像灰度进行处理,由于Sobel算子并没有严格地模拟人的视觉生理特征,所以提取的图像轮廓有时并不能令人满意。
Canny算子:该算子功能比前面几种都要好,但是它实现起来较为麻烦,Canny算子是一个具有滤波,增强,检测的多阶段的优化算子,在进行处理前,Canny算子先利用高斯平滑滤波器来平滑图像以除去噪声,Canny分割算法采用一阶偏导的有限差分来计算梯度幅值和方向,
以上是关于手机摄像头组成结构和工作原理简介的主要内容,如果未能解决你的问题,请参考以下文章