STM32H7教程第41章 STM32H7的BDMA应用之控制任意IO做PWM和脉冲数控制
Posted armfly
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了STM32H7教程第41章 STM32H7的BDMA应用之控制任意IO做PWM和脉冲数控制相关的知识,希望对你有一定的参考价值。
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980
第41章 STM32H7的BDMA应用之控制任意IO做PWM和脉冲数控制
本章教程为大家讲解定时器触发DMAMUX,控制BDMA让GPIO输出PWM以及脉冲数的控制,实际项目中有一定的使用价值。
41.1 初学者重要提示
41.2 定时器触发BDMA驱动设计
41.3 BDMA板级支持包(bsp_tim_dma.c)
41.4 BDMA驱动移植和使用
41.5 实验例程设计框架
41.6 实验例程说明(MDK)
41.7 实验例程说明(IAR)
41.8 总结
41.1 初学者重要提示
- 学习本章节前,务必优先学习第39章和40章,需要对DMAMUX,BDMA的基础知识和HAL库的几个常用API有个认识。
- 使用半传输完成中断和传输完成中断实现的双缓冲效果跟BDMA本身支持的双缓冲模式实现的效果是一样的。只是最大传输个数只能达到32767次。
- 相比定时器本身支持的PWM,这种方式更加灵活,可以让任意IO都可以输出PWM,而且方便运行中动态修改输出状态。
41.2 定时器触发BDMA驱动设计
定时器触发DMAMUX,控制BDMA让GPIO输出PWM的实现思路框图如下:
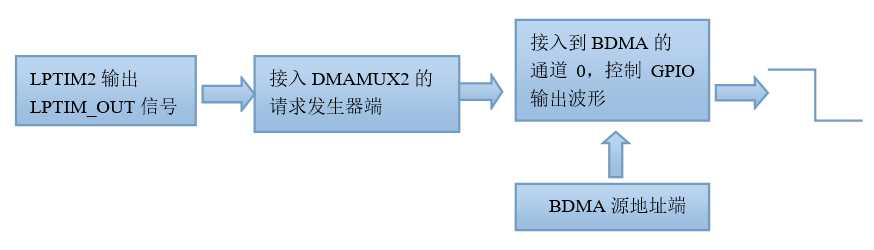
下面将程序设计中的相关问题逐一为大家做个说明。
41.2.1 定时器选择
使用BDMA的话,请求信号都是来自DMAMUX2,而控制DMA做周期性传输的话,可以使用定时器触发,这样的话就可以使用DMAMUX的请求发生器功能,支持如下几种触发:
#define HAL_DMAMUX2_REQ_GEN_DMAMUX2_CH0_EVT 0U #define HAL_DMAMUX2_REQ_GEN_DMAMUX2_CH1_EVT 1U #define HAL_DMAMUX2_REQ_GEN_DMAMUX2_CH2_EVT 2U #define HAL_DMAMUX2_REQ_GEN_DMAMUX2_CH3_EVT 3U #define HAL_DMAMUX2_REQ_GEN_DMAMUX2_CH4_EVT 4U #define HAL_DMAMUX2_REQ_GEN_DMAMUX2_CH5_EVT 5U #define HAL_DMAMUX2_REQ_GEN_DMAMUX2_CH6_EVT 6U #define HAL_DMAMUX2_REQ_GEN_LPUART1_RX_WKUP 7U #define HAL_DMAMUX2_REQ_GEN_LPUART1_TX_WKUP 8U #define HAL_DMAMUX2_REQ_GEN_LPTIM2_WKUP 9U #define HAL_DMAMUX2_REQ_GEN_LPTIM2_OUT 10U #define HAL_DMAMUX2_REQ_GEN_LPTIM3_WKUP 11U #define HAL_DMAMUX2_REQ_GEN_LPTIM3_OUT 12U #define HAL_DMAMUX2_REQ_GEN_LPTIM4_WKUP 13U #define HAL_DMAMUX2_REQ_GEN_LPTIM5_WKUP 14U #define HAL_DMAMUX2_REQ_GEN_I2C4_WKUP 15U #define HAL_DMAMUX2_REQ_GEN_SPI6_WKUP 16U #define HAL_DMAMUX2_REQ_GEN_COMP1_OUT 17U #define HAL_DMAMUX2_REQ_GEN_COMP2_OUT 18U #define HAL_DMAMUX2_REQ_GEN_RTC_WKUP 19U #define HAL_DMAMUX2_REQ_GEN_EXTI0 20U #define HAL_DMAMUX2_REQ_GEN_EXTI2 21U #define HAL_DMAMUX2_REQ_GEN_I2C4_IT_EVT 22U #define HAL_DMAMUX2_REQ_GEN_SPI6_IT 23U #define HAL_DMAMUX2_REQ_GEN_LPUART1_TX_IT 24U #define HAL_DMAMUX2_REQ_GEN_LPUART1_RX_IT 25U #define HAL_DMAMUX2_REQ_GEN_ADC3_IT 26U #define HAL_DMAMUX2_REQ_GEN_ADC3_AWD1_OUT 27U #define HAL_DMAMUX2_REQ_GEN_BDMA_CH0_IT 28U #define HAL_DMAMUX2_REQ_GEN_BDMA_CH1_IT 29U
我们这里使用的是LPTIM2_OUT,因为BDMA,LPTIM2和GPIO都在D3域。
接下来就是LPTIM的时钟配置问题,由前面的LPTIM章节,我们知道LPTIM2的时钟可以由LSE,LSI,APB或者外部输入时钟提供。使用LSE,LSI或者外部输入的好处是停机状态下,LPTIM1也可以正常工作。
- V7开发板使用的LSE晶振是32768Hz。
- STM32H743的LSI频率约32KHz。
- LPTIM1 – LPTIM5的频率都是100MHz。
System Clock source = PLL (HSE) SYSCLK(Hz) = 400000000 (CPU Clock) HCLK(Hz) = 200000000 (AXI and AHBs Clock) AHB Prescaler = 2 D1 APB3 Prescaler = 2 (APB3 Clock 100MHz) D2 APB1 Prescaler = 2 (APB1 Clock 100MHz) D2 APB2 Prescaler = 2 (APB2 Clock 100MHz) D3 APB4 Prescaler = 2 (APB4 Clock 100MHz) 因为APB1 prescaler != 1, 所以 APB1上的TIMxCLK = APB1 x 2 = 200MHz; 不含这个总线下的LPTIM1 因为APB2 prescaler != 1, 所以 APB2上的TIMxCLK = APB2 x 2 = 200MHz; APB4上面的TIMxCLK没有分频,所以就是100MHz; APB1 定时器有 TIM2, TIM3 ,TIM4, TIM5, TIM6, TIM7, TIM12, TIM13, TIM14,LPTIM1 APB2 定时器有 TIM1, TIM8 , TIM15, TIM16,TIM17 APB4 定时器有 LPTIM2,LPTIM3,LPTIM4,LPTIM5
如果选择APB时钟的话,配置如下:
RCC_PeriphCLKInitTypeDef RCC_PeriphCLKInitStruct = {0};
RCC_PeriphCLKInitStruct.PeriphClockSelection = RCC_PERIPHCLK_LPTIM2;
RCC_PeriphCLKInitStruct.Lptim2ClockSelection = RCC_LPTIM2CLKSOURCE_D3PCLK1;
HAL_RCCEx_PeriphCLKConfig(&RCC_PeriphCLKInitStruct);
使用APB作为LPTIM系统时钟注意以下两点:
- LPTIM1 – LPTIM5的最高主频都是100MHz。
- 注意参数RCC_LPTIM2CLKSOURCE_D3PCLK1。
LPTIM1使用的RCC_LPTIM1CLKSOURCE_D2PCLK1。
LPTIM2使用的RCC_LPTIM2CLKSOURCE_D3PCLK1。
LPTIM3-LPTIM5使用的RCC_LPTIM345CLKSOURCE_D3PCLK1。
LPTIM2的配置代码如下:
1. /* 2. ****************************************************************************************************** 3. * 函 数 名: LPTIM_Config 4. * 功能说明: 配置LPTIM,用于触发DMAMUX的请求发生器 5. * 形 参: 无 6. * 返 回 值: 无 7. ****************************************************************************************************** 8. */ 9. void LPTIM_Config(void) 10. { 11. 12. RCC_PeriphCLKInitTypeDef PeriphClkInitStruct; 13. 14. 15. /*##-1- 配置LPTIM2使用PCLK时钟 ##################################################*/ 16. PeriphClkInitStruct.PeriphClockSelection = RCC_PERIPHCLK_LPTIM2; 17. PeriphClkInitStruct.Lptim2ClockSelection = RCC_LPTIM2CLKSOURCE_D3PCLK1; 18. HAL_RCCEx_PeriphCLKConfig(&PeriphClkInitStruct); 19. 20. 21. /*##-2- 使能LPTIM2时钟并配置 ####################################################*/ 22. __HAL_RCC_LPTIM2_CLK_ENABLE(); 23. 24. LptimHandle.Instance = LPTIM2; 25. LptimHandle.Init.CounterSource = LPTIM_COUNTERSOURCE_INTERNAL; 26. LptimHandle.Init.UpdateMode = LPTIM_UPDATE_ENDOFPERIOD; 27. LptimHandle.Init.OutputPolarity = LPTIM_OUTPUTPOLARITY_HIGH; 28. LptimHandle.Init.Clock.Source = LPTIM_CLOCKSOURCE_APBCLOCK_LPOSC; 29. LptimHandle.Init.Clock.Prescaler = LPTIM_PRESCALER_DIV1; 30. LptimHandle.Init.UltraLowPowerClock.Polarity = LPTIM_CLOCKPOLARITY_RISING; 31. LptimHandle.Init.UltraLowPowerClock.SampleTime = LPTIM_CLOCKSAMPLETIME_DIRECTTRANSITION; 32. LptimHandle.Init.Trigger.Source = LPTIM_TRIGSOURCE_SOFTWARE; 33. LptimHandle.Init.Trigger.ActiveEdge = LPTIM_ACTIVEEDGE_RISING; 34. LptimHandle.Init.Trigger.SampleTime = LPTIM_TRIGSAMPLETIME_DIRECTTRANSITION; 35. 36. /*##-3- 初始化LPTIM2 ##########################################################*/ 37. if(HAL_LPTIM_Init(&LptimHandle) != HAL_OK) 38. { 39. Error_Handler(__FILE__, __LINE__); 40. } 41. 42. /*##-4- 启动LPTIM2的PWM模式,但使用输出引脚,仅用于DMAMUX的触发 ##############*/ 43. /* LPTIM2的时钟主频是100MHz,这里配置触发是100MHz / (10000 - 1 + 1) = 10KHz */ 44. if (HAL_LPTIM_PWM_Start(&LptimHandle, 10000-1, 5000 - 1) != HAL_OK) 45. { 46. Error_Handler(__FILE__, __LINE__); 47. } 48. }
这里把几个关键的地方阐释下:
- 第16 – 18行,配置LPTIM2使用APB时钟。
- 第22 – 40行, 配置LPTIM2的相关参数,具体每个参数代表的含义可以看前面LPTIM章节的讲解。
- 第44 – 47行,配置LPTIM2工作在PWM模式,频率10KHz,占空比50%。这里仅仅是用到LPTIM2_OUT的输出信号作为DMAMUX的请求发生器触发源,所以用不到PWM的输出引脚。
41.2.2 DMMUX和BDMA配置
完整配置如下:
1. /* 2. ****************************************************************************************************** 3. * 函 数 名: bsp_InitTimBDMA 4. * 功能说明: 配置DMAMUX的定时器触+DMA控制任意IO做PWM和脉冲数控制 5. * 形 参: 无 6. * 返 回 值: 无 7. ****************************************************************************************************** 8. */ 9. void bsp_InitTimBDMA(void) 10. { 11. GPIO_InitTypeDef GPIO_InitStruct; 12. DMA_HandleTypeDef DMA_Handle = {0}; 13. HAL_DMA_MuxRequestGeneratorConfigTypeDef dmamux_ReqGenParams ={0}; 14. 15. 16. /*##-1- ##################################################*/ 17. __HAL_RCC_GPIOB_CLK_ENABLE(); 18. 19. GPIO_InitStruct.Pin = GPIO_PIN_1; 20. GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; 21. GPIO_InitStruct.Pull = GPIO_NOPULL; 22. GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; 23. HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); 24. 25. 26. /*##-2- Configure the DMA ##################################################*/ 27. __HAL_RCC_BDMA_CLK_ENABLE(); 28. 29. DMA_Handle.Instance = BDMA_Channel0; /* 使用的BDMA通道0 */ 30. DMA_Handle.Init.Request = BDMA_REQUEST_GENERATOR0; /* 请求类型采用的DMAMUX请求发生器通道0 */ 31. DMA_Handle.Init.Direction = DMA_MEMORY_TO_PERIPH; /* 传输方向是从存储器到外设 */ 32. DMA_Handle.Init.PeriphInc = DMA_PINC_DISABLE; /* 外设地址自增禁止 */ 33. DMA_Handle.Init.MemInc = DMA_MINC_ENABLE; /* 存储器地址自增使能 */ 34. DMA_Handle.Init.PeriphDataAlignment = DMA_PDATAALIGN_WORD; /* 外设数据传输位宽选择字,即32bit */ 35. DMA_Handle.Init.MemDataAlignment = DMA_MDATAALIGN_WORD; /* 存储器数据传输位宽选择字,即32bit */ 36. DMA_Handle.Init.Mode = DMA_CIRCULAR; /* 循环模式 */ 37. DMA_Handle.Init.Priority = DMA_PRIORITY_LOW; /* 优先级低 */ 38. DMA_Handle.Init.FIFOMode = DMA_FIFOMODE_DISABLE; /* BDMA不支持FIFO */ 39. DMA_Handle.Init.FIFOThreshold = DMA_FIFO_THRESHOLD_FULL; /* BDMA不支持FIFO阀值设置 */ 40. DMA_Handle.Init.MemBurst = DMA_MBURST_SINGLE; /* BDMA不支持存储器突发 */ 41. DMA_Handle.Init.PeriphBurst = DMA_PBURST_SINGLE; /* BDMA不支持外设突发 */ 42. 43. HAL_DMA_Init(&DMA_Handle); 44. 45. /* 开启BDMA Channel0的中断 */ 46. HAL_NVIC_SetPriority(BDMA_Channel0_IRQn, 2, 0); 47. HAL_NVIC_EnableIRQ(BDMA_Channel0_IRQn); 48. 49. /*##-3- 配置DMAMUX #########################################################*/ 50. dmamux_ReqGenParams.SignalID = HAL_DMAMUX2_REQ_GEN_LPTIM2_OUT; /* 请求触发器选择LPTIM2_OUT */ 51. dmamux_ReqGenParams.Polarity = HAL_DMAMUX_REQ_GEN_RISING_FALLING; /* 上升沿和下降沿均可触发 */ 52. dmamux_ReqGenParams.RequestNumber = 1; /* 触发后,传输进行1次DMA传输 */ 53. 54. HAL_DMAEx_ConfigMuxRequestGenerator(&DMA_Handle, &dmamux_ReqGenParams); /* 配置DMAMUX */ 55. 56. HAL_DMAEx_EnableMuxRequestGenerator (&DMA_Handle); /* 使能DMAMUX请求发生器 */ 57. 58. /*##-4- 启动DMA传输 ################################################*/ 59. HAL_DMA_Start_IT(&DMA_Handle, (uint32_t)IO_Toggle, (uint32_t)&GPIOB->BSRRL, 8); 60. 61. /* 62. 默认情况下,用户通过注册回调函数DMA_Handle.XferHalfCpltCallback,然后函数HAL_DMA_Init会开启半 63. 传输完成中断, 64. 由于这里没有使用HAL库默认的中断管理函数HAL_DMA_IRQHandler,直接手动开启。 65. */ 66. BDMA_Channel0->CCR |= BDMA_CCR_HTIE; 67. 68. LPTIM_Config(); /* 配置LPTIM触发DMAMUX */ 69. }
这里把几个关键的地方阐释下:
- 第12 - 13行,对作为局部变量的HAL库结构体做初始化,防止不确定值配置时出问题。
- 第17 - 23行,配置PB1推挽输出。
- 第27 – 43行,配置BDMA的基本参数,注释较详细。
- 第46 – 47行,配置BDMA的中断优先级,并使能。
- 第50 – 56行,配置DMAMUX的请求发生器触发源选择的LPTIM2_OUT,上升沿和下降沿均触发BDMA传输。
- 第59行,采用中断方式启动BDAM传输,这里中断注意第2个参数和第3个参数。第2个原地址,定义如下:
uint32_t IO_Toggle[8] ={ 0x00000002U, 0x00020000U, 0x00000002U, 0x00020000U, 0x00000002U, 0x00020000U, 0x00000002U, 0x00020000U, };
定义了8个uint32_t类型的变量。第3个参数非常考究,这里使用的GPIO的BSRR寄存器,这个寄存器的特点就是置1有效,而清零操作对其无效。
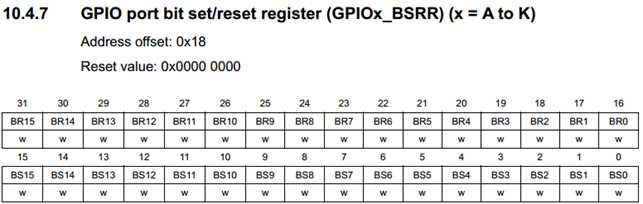
高16位用于控制GPIO的输出低电平,而低16位用于输出高电平工作,所以我们这里设置
GPIOB_BSRR = 0x00000002时,表示PB1输出高电平。
GPIOB_BSRR = 0x00020000时,表示PB1输出低电平。
通过这种方式就实现了PB1引脚的高低电平控制。
- 第66行,这里比较特殊,默认情况下,用户通过注册回调函数DMA_Handle.XferHalfCpltCallback,然后函数HAL_DMA_Init会开启半传输完成中断,由于这里没有使用HAL库默认的中断管理函数HAL_DMA_IRQHandler,直接手动开启。
- 第68行,调用LPTIM的初始化配置。
41.2.3 BDMA存储器选择注意事项
由于STM32H7 Cache的存在,凡是CPU和DMA都会操作到的存储器,我们都要注意数据一致性问题。对于本章节要实现的功能,如果不需要运行中动态修改BDMA源地址中的数据,可以不用管这个问题,如果要动态修改,就得注意Cache所带来的的数据一致性问题,这里提供两种解决办法:
- 方法一:
设置BDMA所使用SRAM3存储区的Cache属性为Write through, read allocate,no write allocate。保证写入的数据会立即更新到SRAM3里面。
/* 配置SRAM3的属性为Write through, read allocate,no write allocate */ MPU_InitStruct.Enable = MPU_REGION_ENABLE; MPU_InitStruct.BaseAddress = 0x38000000; MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB; MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS; MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE; MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE; MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE; MPU_InitStruct.Number = MPU_REGION_NUMBER2; MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0; MPU_InitStruct.SubRegionDisable = 0x00; MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct);
- 方法二:
设置SRAM3的缓冲区做32字节对齐,大小最好也是32字节整数倍,然后调用函数SCB_CleanDCache_by_Addr做Clean操作即可,保证BDMA读取到的数据是刚更新好的。
本章节配套例子是直接使用的方法一。例子中变量的定义方式如下:
/* 方便Cache类的API操作,做32字节对齐 */ #if defined ( __ICCARM__ ) #pragma location = 0x38000000 uint32_t IO_Toggle[8] = { 0x00000002U, 0x00020000U, 0x00000002U, 0x00020000U, 0x00000002U, 0x00020000U, 0x00000002U, 0x00020000U, }; #elif defined ( __CC_ARM ) ALIGN_32BYTES(__attribute__((section (".RAM_D3"))) uint32_t IO_Toggle[8]) = { 0x00000002U, 0x00020000U, 0x00000002U, 0x00020000U, 0x00000002U, 0x00020000U, 0x00000002U, 0x00020000U, }; #endif
对于IAR需要#pragma location指定位置,而MDK通过分散加载即可实现,详情看前面第26章,有详细讲解。
41.2.4 BDMA中断处理
前面的配置中开启了BDMA的传输完成中断、半传输完成中断和传输错误中断。通过半传输完整中断和传输完成中断可以实现双缓冲的效果:
/* ********************************************************************************************************* * 函 数 名: BDMA_Channel0_IRQHandler * 功能说明: BDMA通道0 * 形 参: 无 * 返 回 值: 无 ********************************************************************************************************* */ void BDMA_Channel0_IRQHandler(void) { /* 传输完成中断 */ if((BDMA->ISR & BDMA_FLAG_TC0) != RESET) { BDMA->IFCR = BDMA_FLAG_TC0; /* 1、传输完成开始使用DMA缓冲区的前半部分,此时可以动态修改后半部分数据 比如缓冲区大小是IO_Toggle[0] 到 IO_Toggle[7] 那么此时可以修改IO_Toggle[4] 到 IO_Toggle[7] 2、变量所在的SRAM区已经通过MPU配置为WT模式,更新变量IO_Toggle会立即写入。 3、不配置MPU的话,也可以通过Cahce的函数SCB_CleanDCache_by_Addr做Clean操作。 */ } /* 半传输完成中断 */ if((BDMA->ISR & BDMA_FLAG_HT0) != RESET) { BDMA->IFCR = BDMA_FLAG_HT0; /* 1、半传输完成开始使用DMA缓冲区的后半部分,此时可以动态修改前半部分数据 比如缓冲区大小是IO_Toggle[0] 到 IO_Toggle[7] 那么此时可以修改IO_Toggle[0] 到 IO_Toggle[3] 2、变量所在的SRAM区已经通过MPU配置为WT模式,更新变量IO_Toggle会立即写入。 3、不配置MPU的话,也可以通过Cahce的函数SCB_CleanDCache_by_Addr做Clean操作。 */ } /* 传输错误中断 */ if((BDMA->ISR & BDMA_FLAG_TE0) != RESET) { BDMA->IFCR = BDMA_FLAG_TE0; } }
注释的比较清楚。如果输出的PWM频率较高,建议将BDMA的缓冲区设置的大些,防止BDMA中断的执行频率较高。
41.2.5 BDMA脉冲个数控制
借助本章2.4小节的知识点,如果要实现脉冲个数的控制,在BDMA中断服务程序里面动态修改缓冲区即可。比如我们配置:
- BDMA开启半传输完成中断和传输完成中断。
- BDMA传输16次为一轮,每两次传输算一个周期的脉冲。
如果要实现100个脉冲,我们就可以在12轮,即12*8=96个脉冲后的传输完成中断里面修改后半部分输出低电平即可,进入半传输完成中断后再修改前半部分数据输出低电平。
41.3 BDMA板级支持包(bsp_tim_dma.c)
BDMA驱动文件bsp_pwm_dma.c提供了如下两个函数:
- LPTIM_Config
- bsp_InitTimBDMA
函数LPTIM_Config是文件内部调用的,而函数bsp_InitTimBDMA是供用户调用的。
41.3.1 函数LPTIM_Config
函数原型:
static void LPTIM_Config(void)
函数描述:
此函数用于配置LPTIM2工作在PWM模式,但不初始化GPIO,使用内部的LPTIM2_OUT即可作为BDMA请求发生器的触发源。
注意事项:
- 函数前面static用于限制作用域,表示仅在本文件里面调用。
- 关于此函数的讲解在本章的2.1小节
41.3.2 函数bsp_InitTimBDMA
函数原型:
void bsp_InitTimBDMA(void)
函数描述:
此函数用于配置定时器触发BDMA,可以实现任意IO做PWM输出。
注意事项:
- 关于此函数的讲解在本章2.2小节。
使用举例:
作为初始化函数,直接在bsp.c文件的bsp_Init函数里面调用即可。
41.4 BDMA驱动移植和使用
低功耗定时器的移植比较简单:
- 第1步:复制bsp_tim_dma.c和bsp_tim_dma.h到自己的工程目录,并添加到工程里面。
- 第2步:这几个驱动文件主要用到HAL库的GPIO、LPTIM和DMA驱动文件,简单省事些可以添加所有HAL库.C源文件进来。
- 第3步,应用方法看本章节配套例子即可。
41.5 实验例程设计框架
通过程序设计框架,让大家先对配套例程有一个全面的认识,然后再理解细节,本次实验例程的设计框架如下:
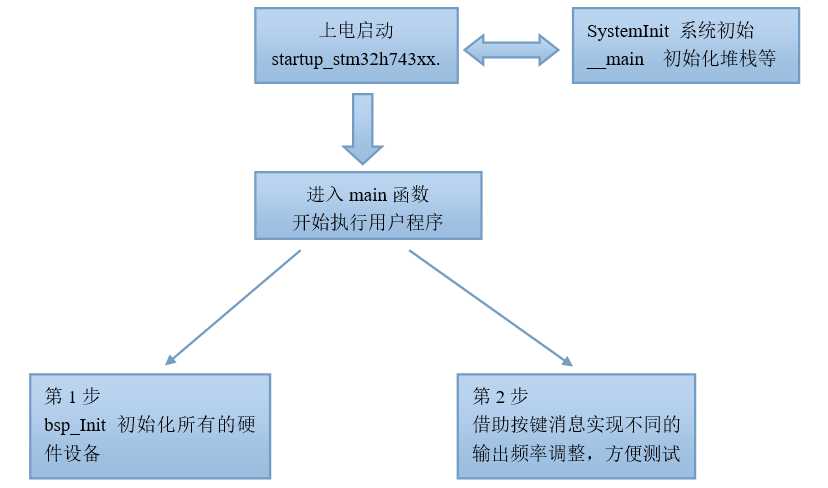
第1阶段,上电启动阶段:
- 这部分在第14章进行了详细说明。
第2阶段,进入main函数:
- 第1步,硬件初始化,主要是MPU,Cache,HAL库,系统时钟,滴答定时器,LED和串口。
- 第2步,借助按键消息实现不同的输出频率调整,方便测试。
41.6 实验例程说明(MDK)
配套例子:
V7-010_DMAMUX的定时器触+BDMA控制任意IO做PWM和脉冲数控制
实验目的:
- 学习DMAMUX的定时器触+BDMA控制任意IO做PWM和脉冲数控制。
实验内容:
- 通过LPTIM2触发DMAMUX的请求发生器,控制DMA给任意IO做PWM输出。
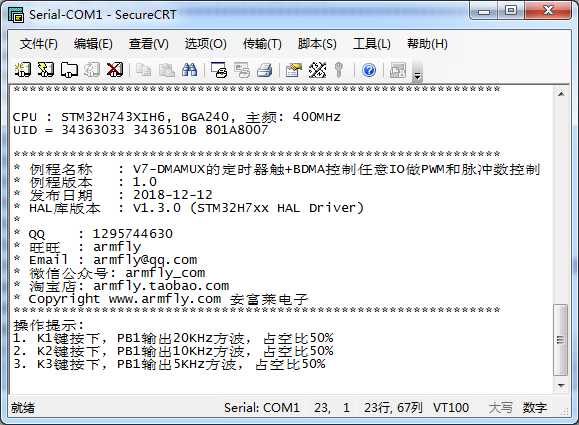
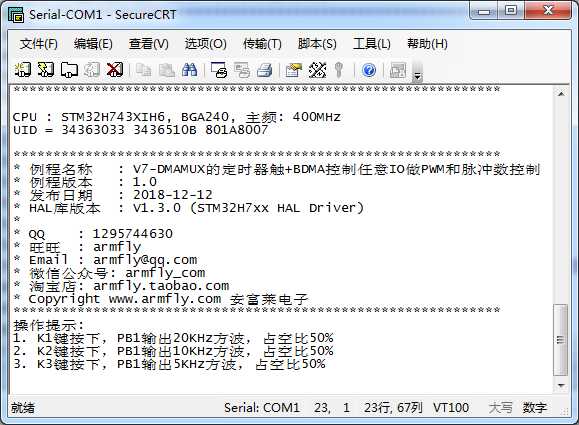
实验操作:
- K1键按下,PB1输出20KHz方波,占空比50%。
- K2键按下,PB1输出10KHz方波,占空比50%。
- K3键按下,PB1输出5KHz方波,占空比50%。
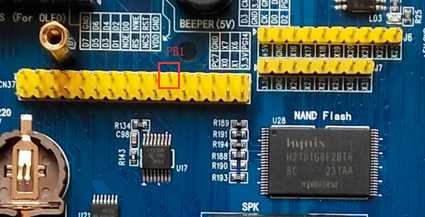
PB1的位置:

上电后串口打印的信息:
波特率 115200,数据位 8,奇偶校验位无,停止位 1
程序设计:
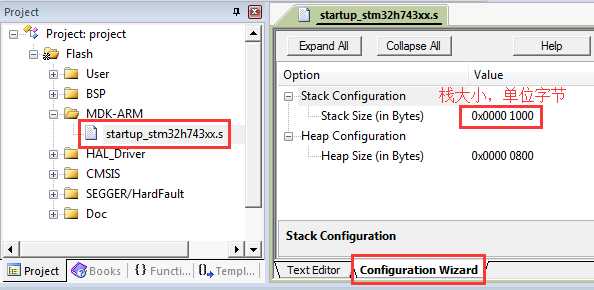
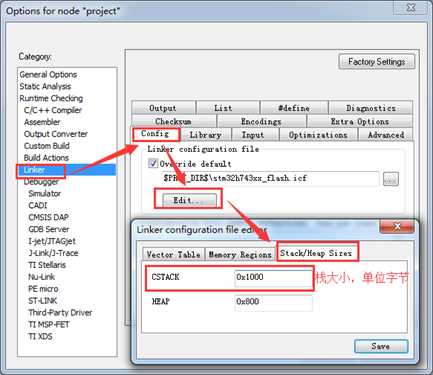
系统栈大小分配:
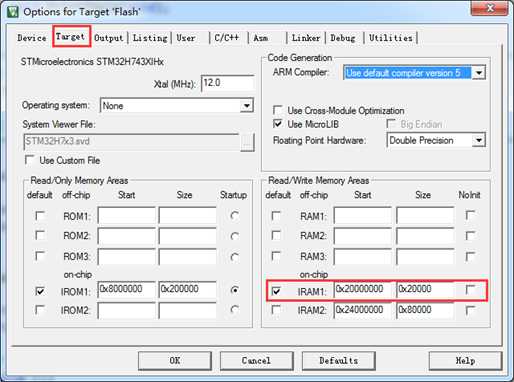
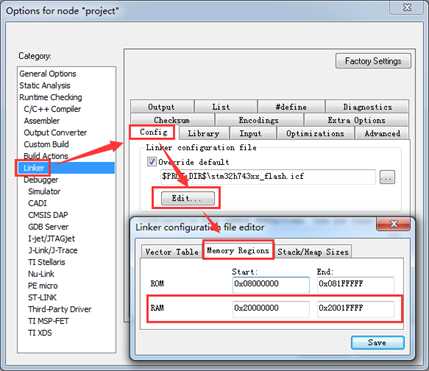
RAM空间用的DTCM:
硬件外设初始化
硬件外设的初始化是在 bsp.c 文件实现:
/* ********************************************************************************************************* * 函 数 名: bsp_Init * 功能说明: 初始化所有的硬件设备。该函数配置CPU寄存器和外设的寄存器并初始化一些全局变量。只需要调用一次 * 形 参:无 * 返 回 值: 无 ********************************************************************************************************* */ void bsp_Init(void) { /* 配置MPU */ MPU_Config(); /* 使能L1 Cache */ CPU_CACHE_Enable(); /* STM32H7xx HAL 库初始化,此时系统用的还是H7自带的64MHz,HSI时钟: - 调用函数HAL_InitTick,初始化滴答时钟中断1ms。 - 设置NVIV优先级分组为4。 */ HAL_Init(); /* 配置系统时钟到400MHz - 切换使用HSE。 - 此函数会更新全局变量SystemCoreClock,并重新配置HAL_InitTick。 */ SystemClock_Config(); /* Event Recorder: - 可用于代码执行时间测量,MDK5.25及其以上版本才支持,IAR不支持。 - 默认不开启,如果要使能此选项,务必看V7开发板用户手册第xx章 */ #if Enable_EventRecorder == 1 /* 初始化EventRecorder并开启 */ EventRecorderInitialize(EventRecordAll, 1U); EventRecorderStart(); #endif bsp_InitKey(); /* 按键初始化,要放在滴答定时器之前,因为按钮检测是通过滴答定时器扫描 */ bsp_InitTimer(); /* 初始化滴答定时器 */ bsp_InitUart(); /* 初始化串口 */ bsp_InitExtIO(); /* 初始化FMC总线74HC574扩展IO. 必须在 bsp_InitLed()前执行 */ bsp_InitLed(); /* 初始化LED */ bsp_InitTimBDMA(); /* 初始化BDMA控制PB1做的PWM输出 */ }
MPU配置和Cache配置:
数据Cache和指令Cache都开启。配置了AXI SRAM区(本例子未用到AXI SRAM),FMC的扩展IO区和SRAM4。
/* ********************************************************************************************************* * 函 数 名: MPU_Config * 功能说明: 配置MPU * 形 参: 无 * 返 回 值: 无 ********************************************************************************************************* */ static void MPU_Config( void ) { MPU_Region_InitTypeDef MPU_InitStruct; /* 禁止 MPU */ HAL_MPU_Disable(); /* 配置AXI SRAM的MPU属性为Write back, Read allocate,Write allocate */ MPU_InitStruct.Enable = MPU_REGION_ENABLE; MPU_InitStruct.BaseAddress = 0x24000000; MPU_InitStruct.Size = MPU_REGION_SIZE_512KB; MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS; MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE; MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE; MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE; MPU_InitStruct.Number = MPU_REGION_NUMBER0; MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL1; MPU_InitStruct.SubRegionDisable = 0x00; MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /* 配置FMC扩展IO的MPU属性为Device或者Strongly Ordered */ MPU_InitStruct.Enable = MPU_REGION_ENABLE; MPU_InitStruct.BaseAddress = 0x60000000; MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB; MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS; MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE; MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE; MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE; MPU_InitStruct.Number = MPU_REGION_NUMBER1; MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0; MPU_InitStruct.SubRegionDisable = 0x00; MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /* 配置SRAM4的属性为Write through, read allocate,no write allocate */ MPU_InitStruct.Enable = MPU_REGION_ENABLE; MPU_InitStruct.BaseAddress = 0x38000000; MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB; MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS; MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE; MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE; MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE; MPU_InitStruct.Number = MPU_REGION_NUMBER2; MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0; MPU_InitStruct.SubRegionDisable = 0x00; MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /*使能 MPU */ HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT); } /* ********************************************************************************************************* * 函 数 名: CPU_CACHE_Enable * 功能说明: 使能L1 Cache * 形 参: 无 * 返 回 值: 无 ********************************************************************************************************* */ static void CPU_CACHE_Enable(void) { /* 使能 I-Cache */ SCB_EnableICache(); /* 使能 D-Cache */ SCB_EnableDCache(); }
主功能:
主程序实现如下操作:
- K1键按下,PB1输出20KHz方波,占空比50%。
- K2键按下,PB1输出10KHz方波,占空比50%。
- K3键按下,PB1输出5KHz方波,占空比50%。
/* ********************************************************************************************************* * 函 数 名: main * 功能说明: c程序入口 * 形 参: 无 * 返 回 值: 错误代码(无需处理) ********************************************************************************************************* */ int main(void) { uint8_t ucKeyCode; /* 按键代码 */ bsp_Init(); /* 硬件初始化 */ PrintfLogo(); /* 打印例程名称和版本等信息 */ PrintfHelp(); /* 打印操作提示 */ bsp_StartAutoTimer(0, 100); /* 启动1个100ms的自动重装的定时器 */ /* 进入主程序循环体 */ while (1) { bsp_Idle(); /* 这个函数在bsp.c文件。用户可以修改这个函数实现CPU休眠和喂狗 */ /* 判断定时器超时时间 */ if (bsp_CheckTimer(0)) { /* 每隔100ms 进来一次 */ bsp_LedToggle(2); } /* 按键滤波和检测由后台systick中断服务程序实现,我们只需要调用bsp_GetKey读取键值即可。 */ ucKeyCode = bsp_GetKey(); /* 读取键值, 无键按下时返回 KEY_NONE = 0 */ if (ucKeyCode != KEY_NONE) { switch (ucKeyCode) { case KEY_DOWN_K1: /* K1键按下,PB1输出20KHz方波,占空比50% */ if (HAL_LPTIM_PWM_Start(&LptimHandle, 5000-1, 2500 - 1) != HAL_OK) { Error_Handler(__FILE__, __LINE__); } break; case KEY_DOWN_K2: /* K2键按下,PB1输出10KHz方波,占空比50% */ if (HAL_LPTIM_PWM_Start(&LptimHandle, 10000-1, 5000 - 1) != HAL_OK) { Error_Handler(__FILE__, __LINE__); } break; case KEY_DOWN_K3: /* K3键按下,PB1输出5KHz方波,占空比50% */ if (HAL_LPTIM_PWM_Start(&LptimHandle, 20000-1, 10000 - 1) != HAL_OK) { Error_Handler(__FILE__, __LINE__); } break; default: /* 其它的键值不处理 */ break; } } } }
41.7 实验例程说明(IAR)
配套例子:
V7-010_DMAMUX的定时器触+BDMA控制任意IO做PWM和脉冲数控制
实验目的:
- 学习DMAMUX的定时器触+BDMA控制任意IO做PWM和脉冲数控制。
实验内容:
- 通过LPTIM2触发DMAMUX的请求发生器,控制DMA给任意IO做PWM输出。
实验操作:
- K1键按下,PB1输出20KHz方波,占空比50%。
- K2键按下,PB1输出10KHz方波,占空比50%。
- K3键按下,PB1输出5KHz方波,占空比50%。
PB1的位置:
上电后串口打印的信息:
波特率 115200,数据位 8,奇偶校验位无,停止位 1
程序设计:
系统栈大小分配:
RAM空间用的DTCM:
硬件外设初始化
硬件外设的初始化是在 bsp.c 文件实现:
/* ********************************************************************************************************* * 函 数 名: bsp_Init * 功能说明: 初始化所有的硬件设备。该函数配置CPU寄存器和外设的寄存器并初始化一些全局变量。只需要调用一次 * 形 参:无 * 返 回 值: 无 ********************************************************************************************************* */ void bsp_Init(void) { /* 配置MPU */ MPU_Config(); /* 使能L1 Cache */ CPU_CACHE_Enable(); /* STM32H7xx HAL 库初始化,此时系统用的还是H7自带的64MHz,HSI时钟: - 调用函数HAL_InitTick,初始化滴答时钟中断1ms。 - 设置NVIV优先级分组为4。 */ HAL_Init(); /* 配置系统时钟到400MHz - 切换使用HSE。 - 此函数会更新全局变量SystemCoreClock,并重新配置HAL_InitTick。 */ SystemClock_Config(); /* Event Recorder: - 可用于代码执行时间测量,MDK5.25及其以上版本才支持,IAR不支持。 - 默认不开启,如果要使能此选项,务必看V7开发板用户手册第xx章 */ #if Enable_EventRecorder == 1 /* 初始化EventRecorder并开启 */ EventRecorderInitialize(EventRecordAll, 1U); EventRecorderStart(); #endif bsp_InitKey(); /* 按键初始化,要放在滴答定时器之前,因为按钮检测是通过滴答定时器扫描 */ bsp_InitTimer(); /* 初始化滴答定时器 */ bsp_InitUart(); /* 初始化串口 */ bsp_InitExtIO(); /* 初始化FMC总线74HC574扩展IO. 必须在 bsp_InitLed()前执行 */ bsp_InitLed(); /* 初始化LED */ bsp_InitTimBDMA(); /* 初始化BDMA控制PB1做的PWM输出 */ }
MPU配置和Cache配置:
数据Cache和指令Cache都开启。配置了AXI SRAM区(本例子未用到AXI SRAM),FMC的扩展IO区和SRAM4。
/* ********************************************************************************************************* * 函 数 名: MPU_Config * 功能说明: 配置MPU * 形 参: 无 * 返 回 值: 无 ********************************************************************************************************* */ static void MPU_Config( void ) { MPU_Region_InitTypeDef MPU_InitStruct; /* 禁止 MPU */ HAL_MPU_Disable(); /* 配置AXI SRAM的MPU属性为Write back, Read allocate,Write allocate */ MPU_InitStruct.Enable = MPU_REGION_ENABLE; MPU_InitStruct.BaseAddress = 0x24000000; MPU_InitStruct.Size = MPU_REGION_SIZE_512KB; MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS; MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE; MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE; MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE; MPU_InitStruct.Number = MPU_REGION_NUMBER0; MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL1; MPU_InitStruct.SubRegionDisable = 0x00; MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /* 配置FMC扩展IO的MPU属性为Device或者Strongly Ordered */ MPU_InitStruct.Enable = MPU_REGION_ENABLE; MPU_InitStruct.BaseAddress = 0x60000000; MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB; MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS; MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE; MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE; MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE; MPU_InitStruct.Number = MPU_REGION_NUMBER1; MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0; MPU_InitStruct.SubRegionDisable = 0x00; MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /* 配置SRAM4的属性为Write through, read allocate,no write allocate */ MPU_InitStruct.Enable = MPU_REGION_ENABLE; MPU_InitStruct.BaseAddress = 0x38000000; MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB; MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS; MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE; MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE; MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE; MPU_InitStruct.Number = MPU_REGION_NUMBER2; MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0; MPU_InitStruct.SubRegionDisable = 0x00; MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /*使能 MPU */ HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT); } /* ********************************************************************************************************* * 函 数 名: CPU_CACHE_Enable * 功能说明: 使能L1 Cache * 形 参: 无 * 返 回 值: 无 ********************************************************************************************************* */ static void CPU_CACHE_Enable(void) { /* 使能 I-Cache */ SCB_EnableICache(); /* 使能 D-Cache */ SCB_EnableDCache(); }
主功能:
主程序实现如下操作:
- K1键按下,PB1输出20KHz方波,占空比50%。
- K2键按下,PB1输出10KHz方波,占空比50%。
- K3键按下,PB1输出5KHz方波,占空比50%。
/* ********************************************************************************************************* * 函 数 名: main * 功能说明: c程序入口 * 形 参: 无 * 返 回 值: 错误代码(无需处理) ********************************************************************************************************* */ int main(void) { uint8_t ucKeyCode; /* 按键代码 */ bsp_Init(); /* 硬件初始化 */ PrintfLogo(); /* 打印例程名称和版本等信息 */ PrintfHelp(); /* 打印操作提示 */ bsp_StartAutoTimer(0, 100); /* 启动1个100ms的自动重装的定时器 */ /* 进入主程序循环体 */ while (1) { bsp_Idle(); /* 这个函数在bsp.c文件。用户可以修改这个函数实现CPU休眠和喂狗 */ /* 判断定时器超时时间 */ if (bsp_CheckTimer(0)) { /* 每隔100ms 进来一次 */ bsp_LedToggle(2); } /* 按键滤波和检测由后台systick中断服务程序实现,我们只需要调用bsp_GetKey读取键值即可。 */ ucKeyCode = bsp_GetKey(); /* 读取键值, 无键按下时返回 KEY_NONE = 0 */ if (ucKeyCode != KEY_NONE) { switch (ucKeyCode) { case KEY_DOWN_K1: /* K1键按下,PB1输出20KHz方波,占空比50% */ if (HAL_LPTIM_PWM_Start(&LptimHandle, 5000-1, 2500 - 1) != HAL_OK) { Error_Handler(__FILE__, __LINE__); } break; case KEY_DOWN_K2: /* K2键按下,PB1输出10KHz方波,占空比50% */ if (HAL_LPTIM_PWM_Start(&LptimHandle, 10000-1, 5000 - 1) != HAL_OK) { Error_Handler(__FILE__, __LINE__); } break; case KEY_DOWN_K3: /* K3键按下,PB1输出5KHz方波,占空比50% */ if (HAL_LPTIM_PWM_Start(&LptimHandle, 20000-1, 10000 - 1) != HAL_OK) { Error_Handler(__FILE__, __LINE__); } break; default: /* 其它的键值不处理 */ break; } } } }
41.8 总结
本章节就为大家讲解这么多,控制BDMA让GPIO输出PWM以及脉冲数的控制,实际项目中有一定的实用价值,望初学者熟练掌握。
以上是关于STM32H7教程第41章 STM32H7的BDMA应用之控制任意IO做PWM和脉冲数控制的主要内容,如果未能解决你的问题,请参考以下文章